Downloaded 42 times
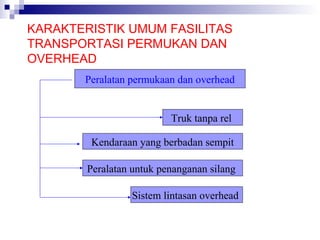


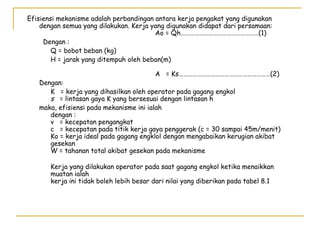
![Momen lentur M diasumsikan bernilai positif bila
menyebabkan kelengkungan kait bertambah (jari-jarinya
berkurang) dan bernilai negatif bila kelengkungannya
berkurang. Karena beban cenderung untuk membuka kait,
momennya bernilai negatif (Gambar 62a) :
M = -Qr = -Q (0,5a + e1)
Nilai x didapat dari persamaan :
1
y
x=
dF
F ∫ y +r
e2
e1
untuk trapesium dengan sisi b1 dan b2 dan tinggi h akan
menjadi x = −1 + 2r b + b − b ( e + r ) 1n r + e − ( b − b )
( b1 + b2 ) h
2
1
2
h
2
2
r + e1
h
=1
a
1
2
b1
=n
b2
Bila kita mengambil nilai h = a, dan bila
dan
5n + 7
[ (1,5n − ditransformasikan
x diatas setelah 0,5)1,09861 − ( n − 1) ] − 1 akan
=
maka rumus 3( n + 1) 2
berbentuk](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-39-320.jpg)
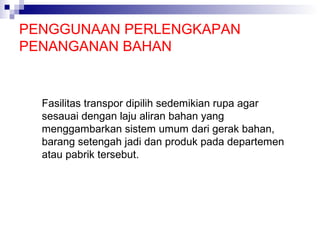
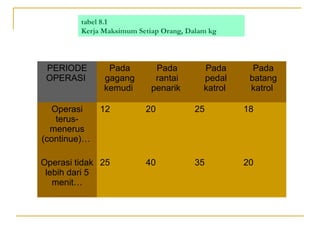
![Tegangan satuan pada permukaan dalam:
σ A3
[
P ( 2R ) + d 2
=
( 2R ) 2 − d 2
2
]
Tegangan satuan pada permukaan luar:
σB 3
p 2d 2
=
2
( 2 R ) −d 2
Tegangan maksimumnya akan terjadi pada permukaan dalam
yakni:
σ A3
Maka
Q(4 R 2 + d 2 )
=
2ds ( 4 R 2 − d 2 )
Q
4R 2 + d 2
s=
x
2dσ1 4 R 2 − d 2](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-66-320.jpg)
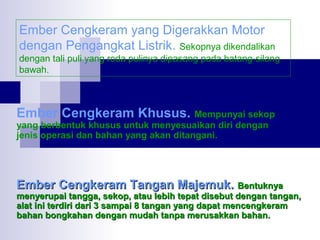
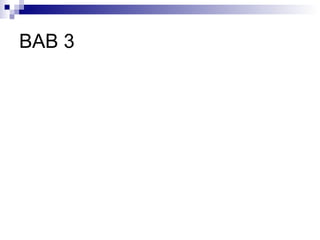
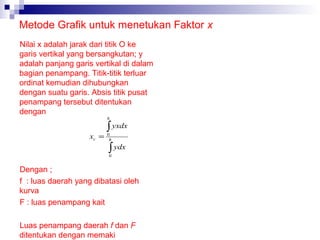
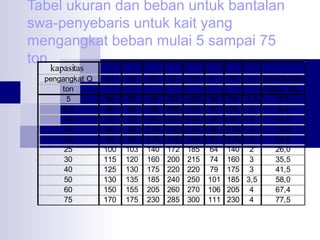
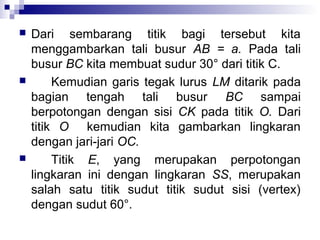
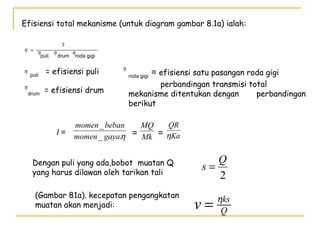
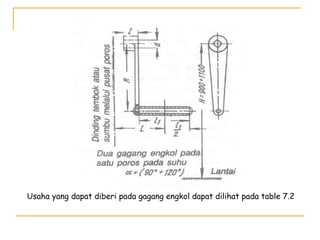
![
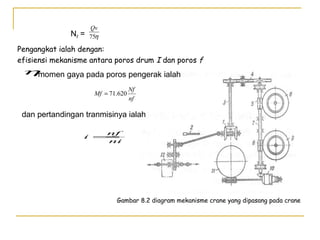
dan roda racet besi cor dan p = 150 – 300 kg/cm
untuk pengunci dan roda racet yang terbuat dari
baja.
Gambar 109 Peralatan racet dengan gigi luar
Gigi racet dengan pertemuan pada bagian
luar diperiksa terhadap kelenturan dengan
rumus :
m ≈ 23
M
zψ [σ lentur ]
Dengan :
m = modul yang setara dengan kisar pada
diameter luar dibagi dengan π](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-85-320.jpg)
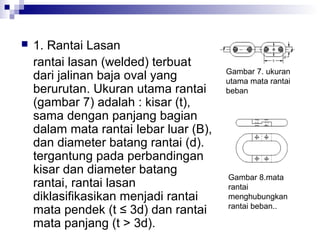
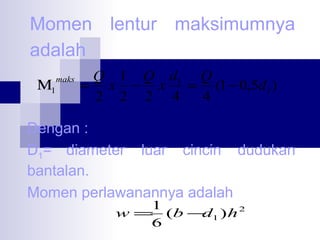
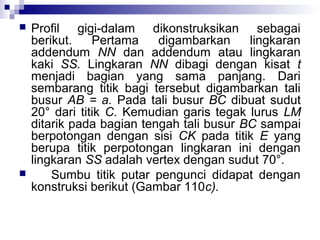
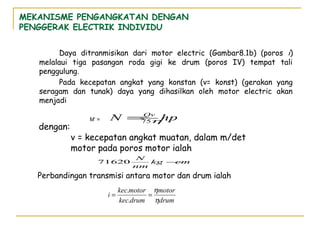
![
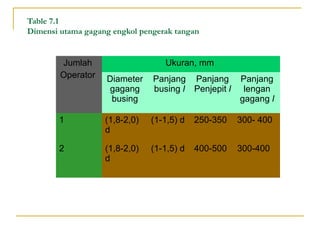
M = momen gaya yang ditransmisikan dalam kg
– cm.
z = jumlah gigi
[σ lentur ] = tegangan lentur aman
Rumus (95) (lihat gambar 109b) diturunkan
sebagai berikut .
Anggapan ABCD adalah daerah patahan
gigi.
Persamaan kekuatan terhadap lentur adalah
Ph = a ² b [σ lentur ]
6](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-86-320.jpg)
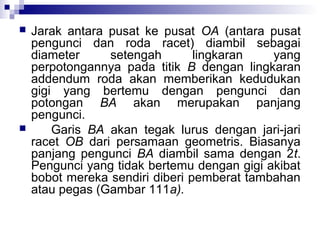
![
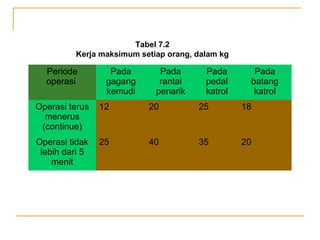
Biasanya a = m dan h = 0,75 m; b = ψm;P = 2M
dan D = zm
D
Maka :
2M 0,75 m = m² ψm [σ lentur ]
zm
6
dan :
m ≈ 23
M
zψ [σ lentur ]
Kecepatan keliling roda racet tersebut
berbanding lurus dengan diameternya. Karena
gaya tumbukan pada pengunci dan gigi
meningkat secara proporsional](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-87-320.jpg)
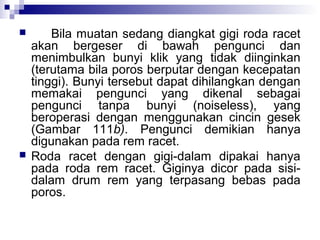
![
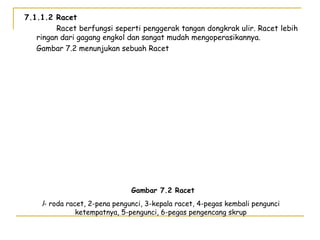
Pengunci diperiksa terhadap tekanan eksentris
ataupun tarikan eksentris;
σ = M lentur + P
W
F
Dengan :
M lentur = P e 1
W = bx² adalah momen ketahanan minimum
yang diperlukan (Gambar 109 d)
Biasanya pena pengunci (Gambar 110a)
dianggap sebagai batang kantilever yang
mengalami pembebanan.
Persamaan kekuatan ialah :
Pl = 0,1 d³ [σ lentur ]](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-89-320.jpg)
![Untuk l = b + a dan P = 2 M kita peroleh
2
zm
d = 2,71
M
b +a
zm [σ lentur ] 2
Dengan memperhatikan penggunaan beban
tumbukan, biasanya pena racet dibuat dari Baja
45 yang mempunyai tegangan lentur aman yang
agak diperkecil.
[σ lentur ] = (300 sampai 500) kg/cm²
Kondisi yang terbaik untuk pengunci yang
bergeser pada gigi racet didapatkan bila φ > ρ
dengan ρ adalah sudut gesek (Gambar 110b).](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-90-320.jpg)
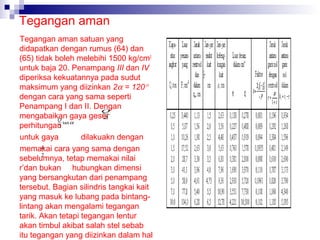
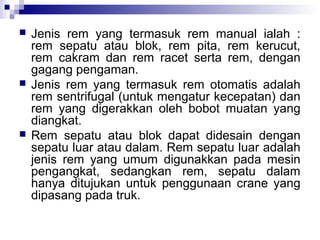
![
Satu atau dua buah pengunci dipsang pada tuas
yang diikat pada poros dan dioperasikan oleh
cincin gesek (Gambar 112). Jumlah gigi berkisar
dari z = 16 sampai 30.
Gigi pada bagian dalam roda racet jauh lebih
j auh lebih kuat dibandingkan dengan gigi pada
bagian luar. Akibatnya persamaan kekuatan
mempunyai bentuk yang berbeda :
M
zψ [σ lentur ]
Simbol yang dipakai mewakili nilai yang sama
dengan persamaan (95).](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-97-320.jpg)
![Resultan tegangannya ialah
±H 1 y1
π
σΣ = ± σlentur - σcom =
32
d
2
1
−
V
π
2
1
d
(240)
4
≤[σ ]
com
Pelat bawah harus diperiksa terhadap tekanan satuan antara bantalan
dengan pelat (tekanan pada dinding lubang akibat gaya H1 dan
tekanan vertikal antara bahu bantalan dengan pelatakibat gaya V)
Resistensi terhadap putaran. Momen resistensi akibat gaya gesek relatif
2
pada sumbu putar ialah
3
M = Wa = Vµ1 r + H1µ2r + H1µ3r1
(241)
Di sini M = M1 + M2 + M3 (M1-momen) resistensi pada bantalan
tekan/aksial; M2dan M3 – momen dari resistensi pada bantalan bagian
baweah dan atas. Rumus tersebut mencangkup M1 = Vµ1 r untuk
d
d
bantalan dorong tak beralur2pada bagian atas. Pada bantalan dorong
−
2
dengan permukaan tekan d (Gambar 199a) momen resistensi
cincin
d
−
2
2
akibat gesekan ialah sebesar
3
3
0
2
2
0
M1 = V µ1
(242)](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-148-320.jpg)
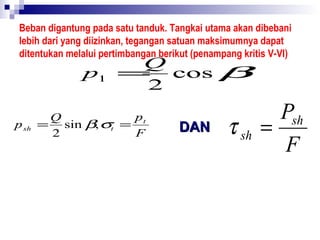
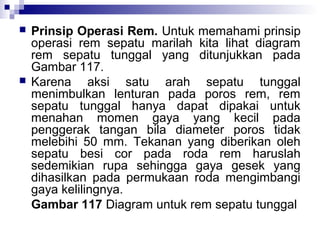
![Dengan :
q-bobotmuatan
a-jangkauan crane
G1-bobot struktur putar crane
L1-lengan resultante bobot G1
Gg-pengimbang
Ls-lengan pengimbang relatif terhadap sumbu putar.
Resultante tegangan pada bus bantalan atas (gambar 201) ialah
σ =σ
± lentur
Σ
H f y
q + 1 + g
G
g
− com =
σ
±
−
<σ
[ com
π3
d
π2
d
32
4
]
dengan d =2r
Dari bentuk pilar secara titik kerja gaya horizontal atas dan gaya
horizontal bawah Hf akan serupa grafik pangkat tiga, yang harus digambarkan
sebelum mulai mendesain pilar.
Gambar202 menunjukan diagram momen dan tegangan untuk
memeriksa perhitungan penampang pilar. Metode berikut ini dilakukan untuk
menentukan defleksi maksimum pilar secara grafis pada titik kerja gaya
horizontal atas Hf . dalam menentukan defleksiakibat penampang pilar yang
berbeda-beda, pertama-tama M/I diagram harus dibuat, dengan beban khayal M/I
ini diberikan pada batang diikat mati. Daerah diagram dibagi menjadibeberapa
bagian F1-F13 dengan beban yang dipusatkan pda titik beratnya. Setiap daerah
diagram dianggap sebagai gaya khayal dan gariselastis digambarkan sebagai
kurva yang mulus. Defleksi maksimum akan terjadi pada titik potong garis terakhir](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-152-320.jpg)
![Tegangan
tekan
mempunyai
nilai
yang
lebih
besar.
Gambar 203c ˚menunjukan distribusi tegangan resultante Σ relatif
terhadap sumbu NN yang digambarkan melalui titik potong arah tegangan
v
dan
kmasing
masing.
Trunion batang lintang diperiksa terhadap defleksi akibat setengah
dari resultan tekanan P = Hf + V dan tekanan satuannya. Gambar204
menunjukan batang lintang pilar tetap yang terpasang pada bantalan rol.
Bantalan radial bawah. Crane kecil menggunakan bantalan rol dengan
sebuah rol yang dipasang pada sisi tiang lengan. Crane besar diberi dua buah
bantalan rol di bagian depan.Bila memakai pengimbang diberi dua pasang rol
di depan dan dibelakang (gambar 205 ) yang dipasang pada kotak khusus pada
ujung bawah tiang lengan crane. Bila kita menandai Hf untuk tekanan
bantalan horizontal [rumus ( 206 )] dan 2 α sudut antara dua buah rol
bantalan (biasanya sama dengan 600) maka gaya yang dikerahkan setiap rol
pada pilar adalah :
H
N =
f
2 cos α](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-153-320.jpg)
![Beban yang tak seragam padarol perputaran tirus akan
mnengasilkan gaya horizontal tambahan yang bekerja pada
pusat putar. Marilah kita tandai Pmaks sebagai gaya
maksimum pada satubuah rol tirus pada sisi muatan dan
αsebagai
sudutke
tirusan
rol
H 1 = maks tan
P
σ
(gambar 210b), Maka gaya ini akan menghasilkan komponen
2
horizontal akibat ketirusan rol sebesar
Tekanan angin hanya dapat diperhitungkan untuk dua rol pada desain
dengan empat buah rol (pada kasus yang paling buruk akibatnya
untukl gaya yang bekerja pada rol) komponen horizontal H’ dan H”
kedua rol lainya ditentukan dengan mengabaikan tekanan angin. Maka,
gaya horizontal yang bekerja pada pusat putar akibat ketirusan rol,
akan sama dengan selisih antara resultan gaya yang bekerja pada
pasangan rol yang berlawanan letaknya:
Ptap = [( H1 + H’ ) – ( H2 + H” )] cos β
Atau
Ptap = [( Pmaks +P’ ) - ( Pmin + P” )] tan
… (259)](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-161-320.jpg)
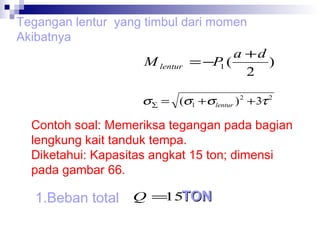
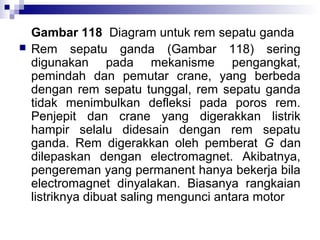
![Tegangan Tambahan Pada Bagian Rangka Akibat Pengereman Crane. Batang tepi
atas mengalami juga gaya lentur pada batang horizontal akibat gaya pengereman
bagian gerak crane bermuatan. Gaya akibat inersia komponen crane akan mencapai
maksimum bila roda perjalan crane secara tiba-tiba.
Jika bobot muatan yang diangkat adalah Q, bobot troli adalah G 0, bobot crane (tanpa
troli) dengan G, dalam kg, percepatan gravitasi adalah g (g=9.81 m/s2) dan koifisien
gesek antara roda perjalan dan rel adalah μ (μ ≈ 0,2) dan jika setengah dari roda
crane direm kita akan mendapatkan
Dengan perlambatan adalah
Gaya inersia massa troli yang bekerja pada rangka batang pada bidang horizontal akan
sama dengan
(351)
Karena gaya ini ditransmisikan ke rel pada girder utama, setiap batang-tepi atas dan
rangka pengaku horizontalnya (melalui penipang slang) akan menahan setengah dari
gaya inersia tersebut. Momen letur maksimum akan terjadi pada jarak dari bagian
tengah bentangan crane. Persamaan momen [rumus (326)] harus ditambah dengan
nilai gaya horizontal yang bekerja pada satu roda satu rangka batang.](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-200-320.jpg)
![Tanda-tanda yang diguanakan rumus (253) sampai (360) ialah sebagai berikut :
ψ
= koefisien dinamik untuk gaya akibat beban konstan (lihat Tabel 42)
Sq = gaya akibat beban konstan
µ = koefisien gay dinamik akibat beban gerak (lihat Tabel 43)
Sp = gaya akibat beban gerak
Sp = gaya akibat beban gerak
Mp = momen lentur akibat lenturan setempat pada batang tepi atas yang
diakibatkan oleh roda troli yang bermuatan (Gambar 237)
(362)
Fnet = luas penampang netto bagian (tanpa lubang paku keling)
Fgr = luas daerah gross bagian (dengan lubang paku keling)
Wnet = momen penampang bagian netto
Wgr = momen penampang bagian gross
∑Sadd = jumlah gaya akibat beban tambahan
∑Madd = jumlah momen akibat beban tambahan
[σ] = tegangan aman](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-205-320.jpg)
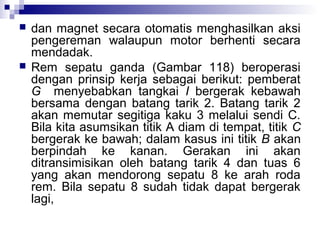
![Tergantung pada arah gerak crane tegangan pada bidang horisontal berubahubah dari tegangan tarik menjadi tegangan tekan dan sebaliknya. Jika gaya
inersia komponen ditahan oleh rangka batng horisontal (Gambar 239) kita
harus mendistribusikan beban pada rodatroli Pdalamketitik sambungan yang
berdekatan, tentukan gaya reaksi horisontal H1 dan H2 dan menggambarkan
diagram Cremona (Gambar 239). Diagram Cremona ini dipergunakan untuk
mencari tegangan tambahan pada bagian-bagian batang tepi atas
yangmerupakan tegangan sekat untuk arah gerak crane diatas tersebut.
Tegangan tambahan
ditambah Fnet maksimum akibat gaya tekan
vertikal untuk mendapatkan [lihat rumus (354) sampai (360)] tegangan
maksimum pada batang tepi atas (batang tepi bawah hanya mengalami
tarikan).
Defleksi Batang dan Lengkungannya. Seperti yang telah diterangkan
sebelumnya, defleksi rangka batang akibat muatan maksimum yang diangkat
dan bobot troli tidak boleh melebihi δ” <
L dengan L-panjang bentangan
rangka batang.
Defleksi kisi rangka batang jembatan jalan dapat ditentukan sampai ketelitian 10
persen dengan rumus
(363)
Dengan :
M = momen desain akibat beban gerak, dalam kg-cm
L = panjang betangan dalam cm](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-207-320.jpg)
![Tergantung pada arah gerak crane tegangan pada bidang horisontal berubahubah dari tegangan tarik menjadi tegangan tekan dan sebaliknya. Jika gaya
inersia komponen ditahan oleh rangka batng horisontal (Gambar 239) kita
harus mendistribusikan beban pada rodatroli Pdalamketitik sambungan yang
berdekatan, tentukan gaya reaksi horisontal H1 dan H2 dan menggambarkan
diagram Cremona (Gambar 239). Diagram Cremona ini dipergunakan untuk
mencari tegangan tambahan pada bagian-bagian batang tepi atas
yangmerupakan tegangan sekat untuk arah gerak crane diatas tersebut.
Tegangan tambahan
ditambah Fnet maksimum akibat gaya tekan
vertikal untuk mendapatkan [lihat rumus (354) sampai (360)] tegangan
maksimum pada batang tepi atas (batang tepi bawah hanya mengalami
tarikan).
Defleksi Batang dan Lengkungannya. Seperti yang telah diterangkan
sebelumnya, defleksi rangka batang akibat muatan maksimum yang diangkat
dan bobot troli tidak boleh melebihi δ” <
L dengan L-panjang bentangan
rangka batang.
Defleksi kisi rangka batang jembatan jalan dapat ditentukan sampai ketelitian 10
persen dengan rumus
(363)
Dengan :
M = momen desain akibat beban gerak, dalam kg-cm
L = panjang betangan dalam cm](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-208-320.jpg)
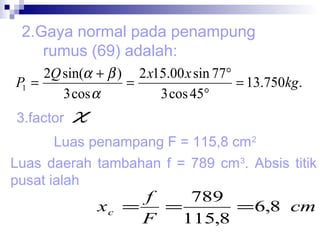
![Tabel 46 Tabel Ringkas hasil Perhitungan
Batang penumpu ujung terbuat dari dua batang siku 50 x 50 x 6 mm karena
tegangannya tidak melebihi tegangan pada penopang miring tersebut.
Tegangan satuan pada bagian rangka batang utama cukup aman untuk baja CT
2.
Gambar 424e menunjukkan diagram Cremona untuk menyelesaikan rangka
batang sisi dan Gambar 242d untuk rangka horisontal. Nilai tegangan pada
rangka-rangka ini diringkas pada Tabel 46.
4. Defleksi pada rangka batang utama akibat beban gerak [rumus (363)]
adalah
δ” =
=
= 0,9 cm
Momen akibat beban gerak akan sama dengan
M=
=
= 1.265.000 kg-cm](https://image.slidesharecdn.com/handoutmesinpengangkat-140220044606-phpapp01/85/Handout-mesin-pengangkat-212-320.jpg)

Dokumen tersebut membahas tentang berbagai jenis peralatan pengangkat dan penanganan bahan, termasuk mesin pengangkat, crane, elevator, serta fasilitas transportasi permukaan dan overhead seperti truk tanpa rel dan sistem lintasan overhead. Dibahas pula karakteristik teknis dan operasi dari berbagai peralatan tersebut."











































































