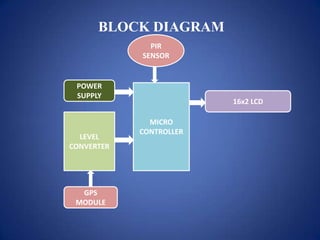
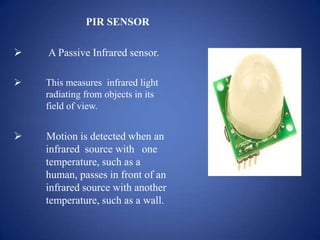
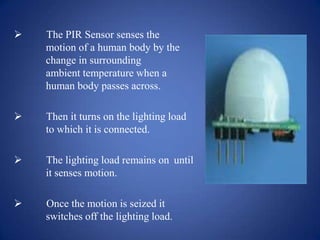
This project combines a GPS module and PIR sensor to geotag locations where movement is detected. The GPS module tracks the location of objects, while the PIR sensor detects movement within a 5m radius. When the PIR sensor detects movement, the microcontroller reads the GPS data to geotag the location on a 16x2 LCD display. This allows tracking locations where motion occurs for applications like security, navigation, and archeological surveys.