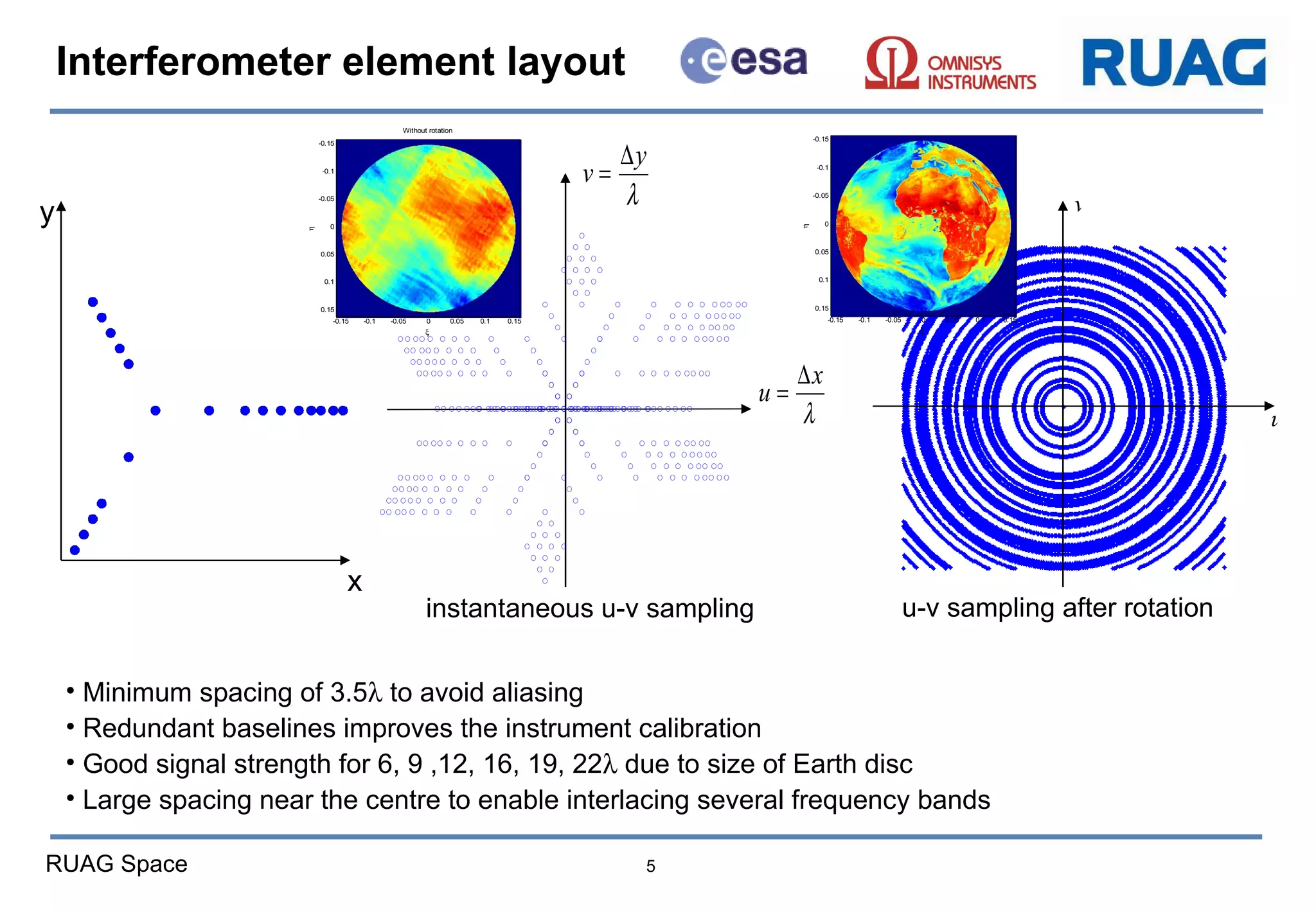
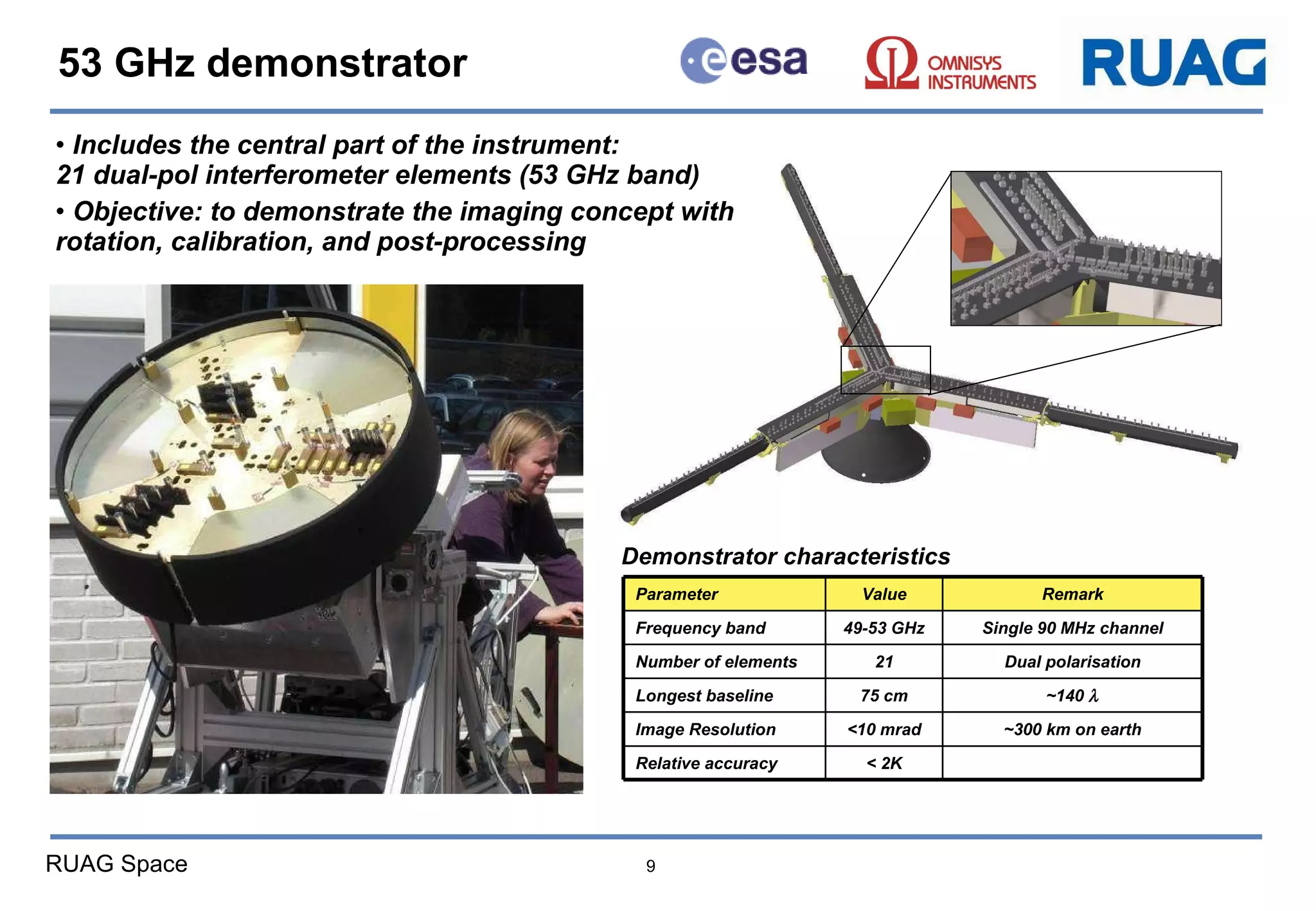
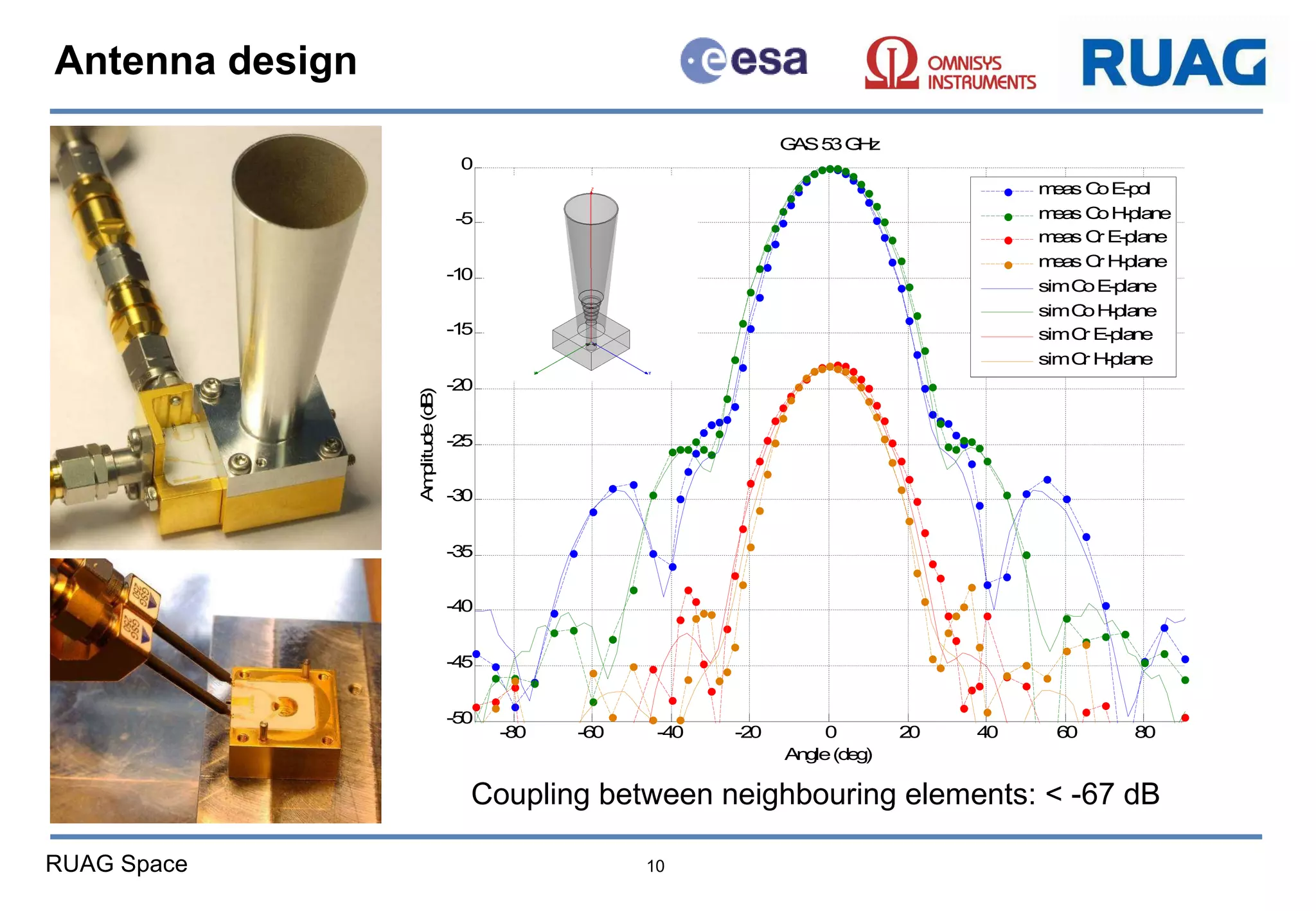
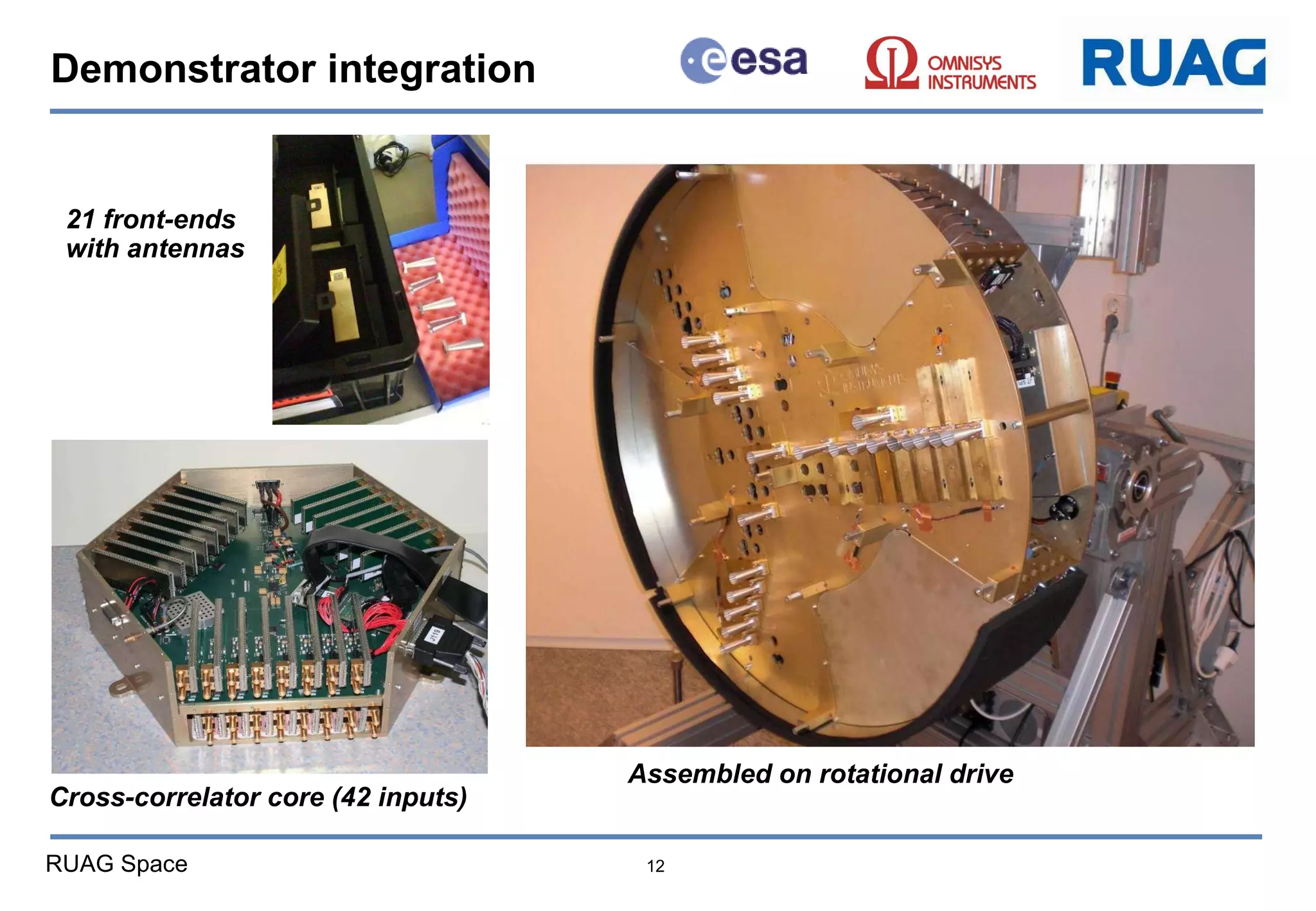
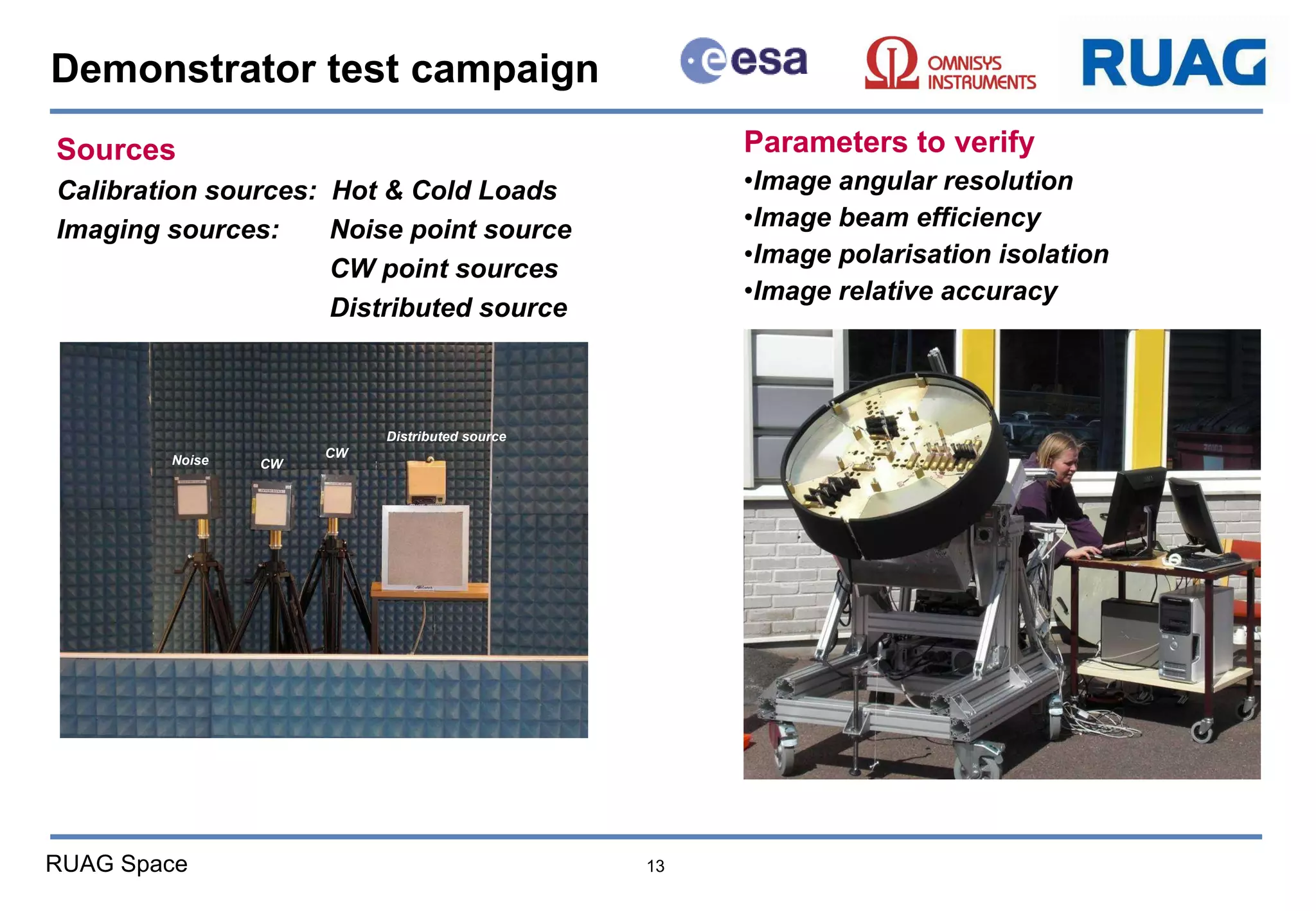
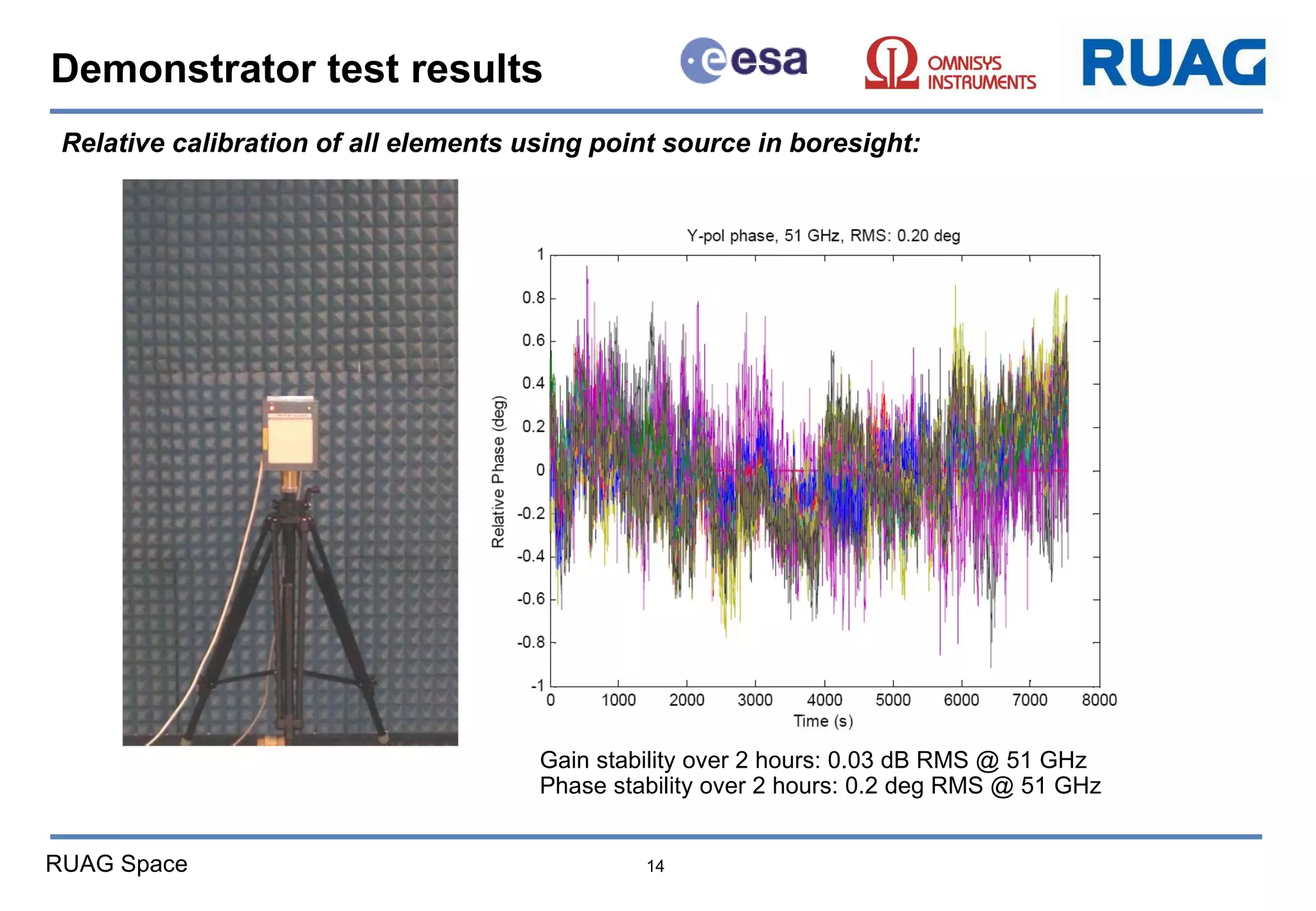
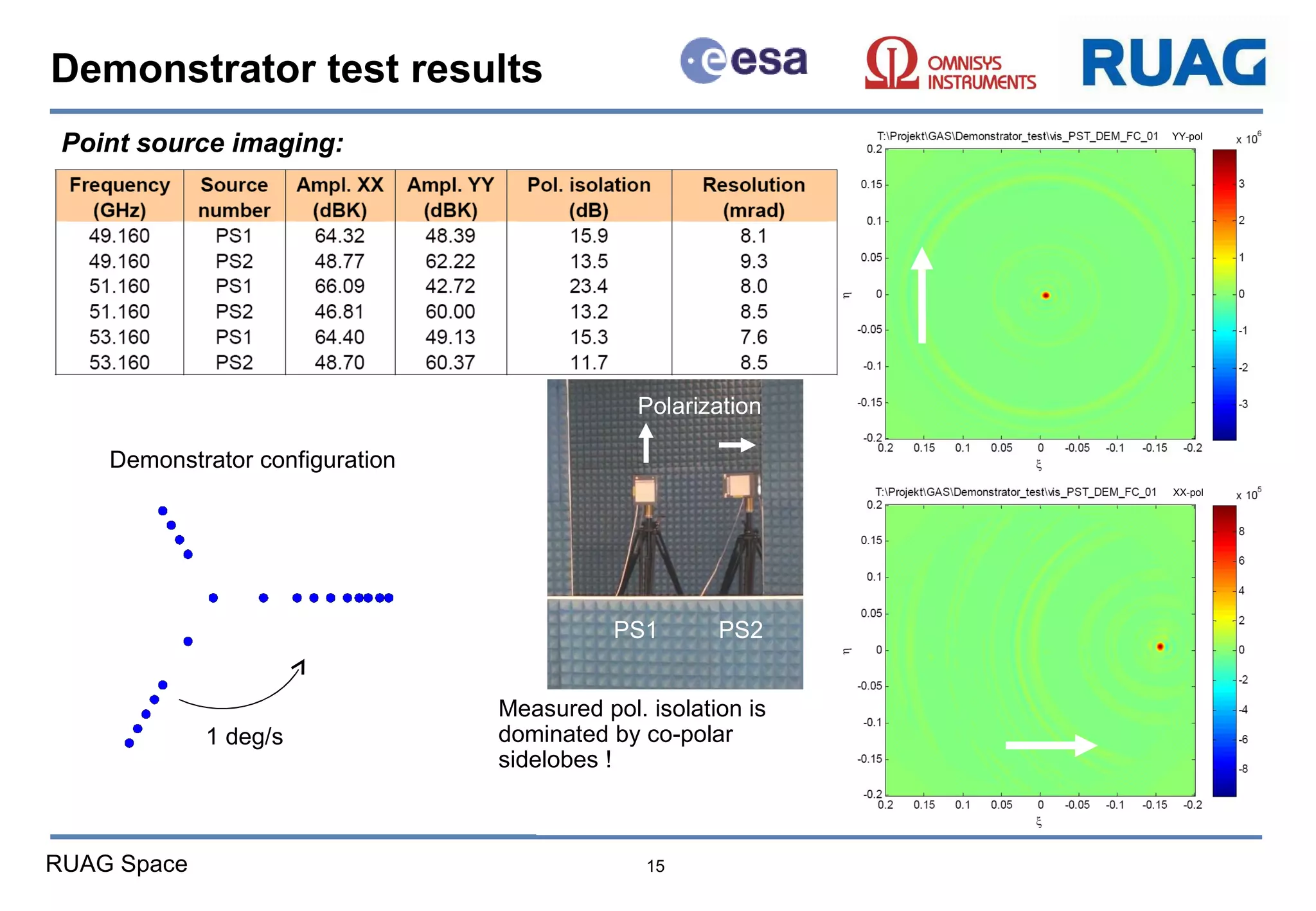
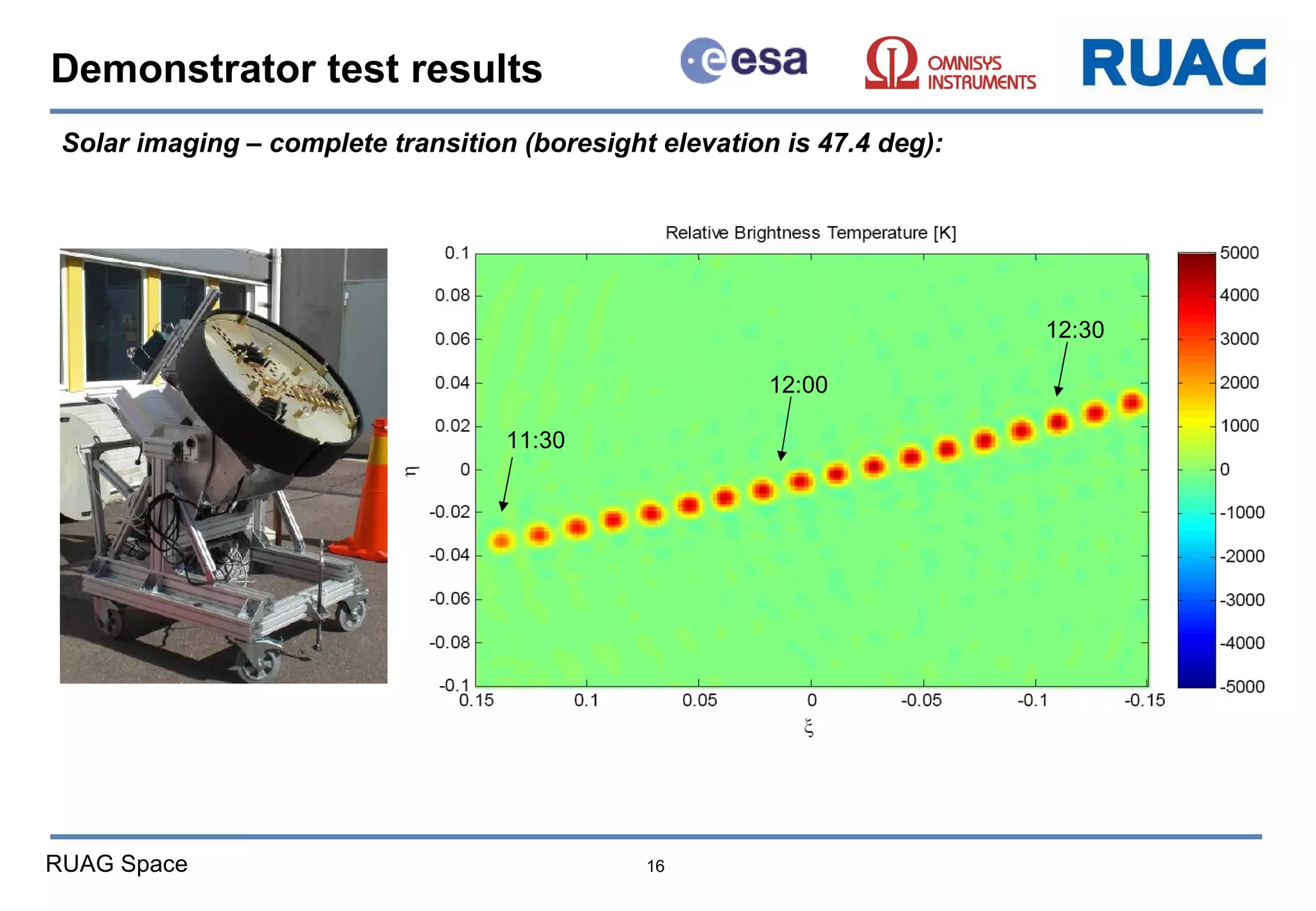
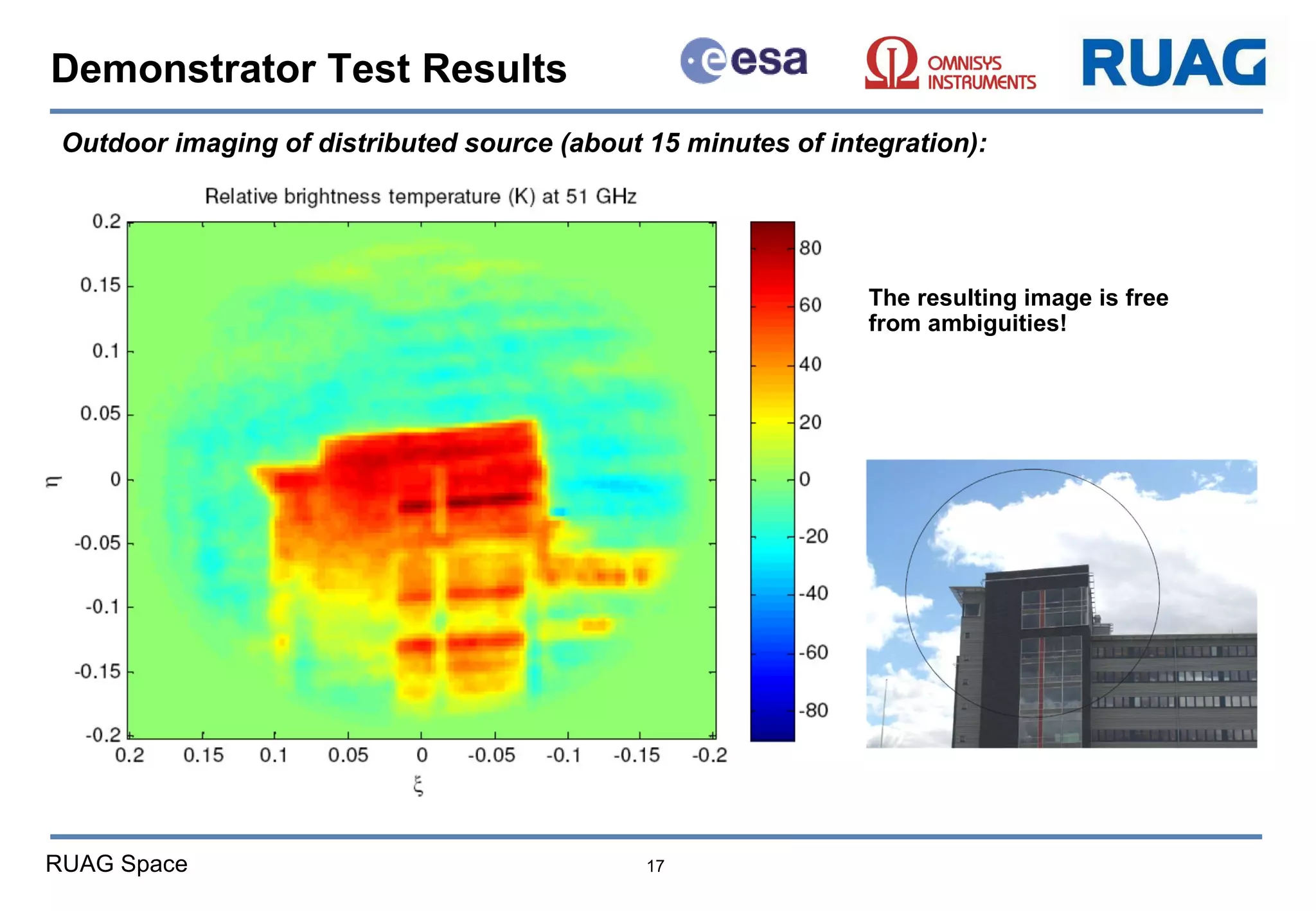
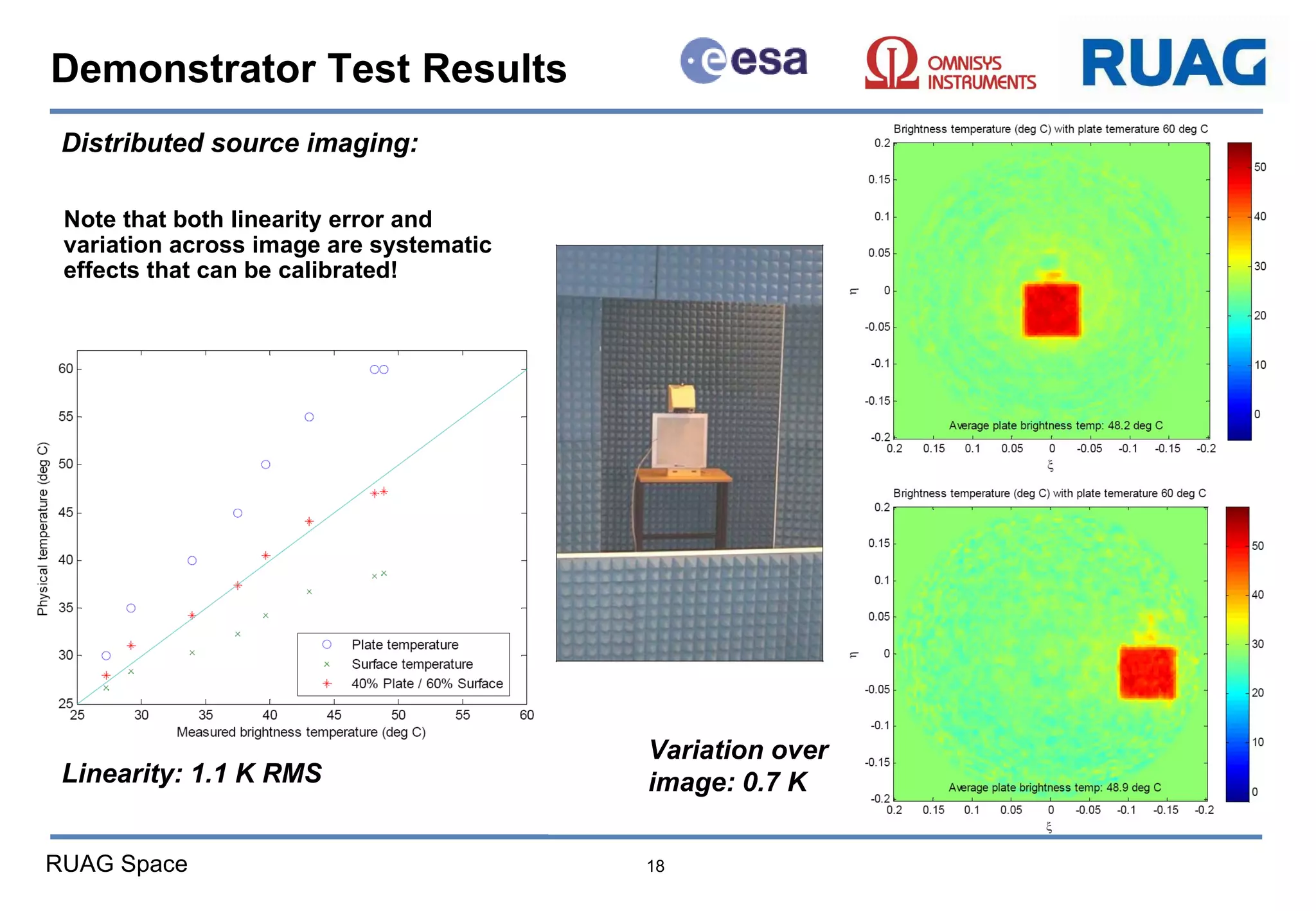
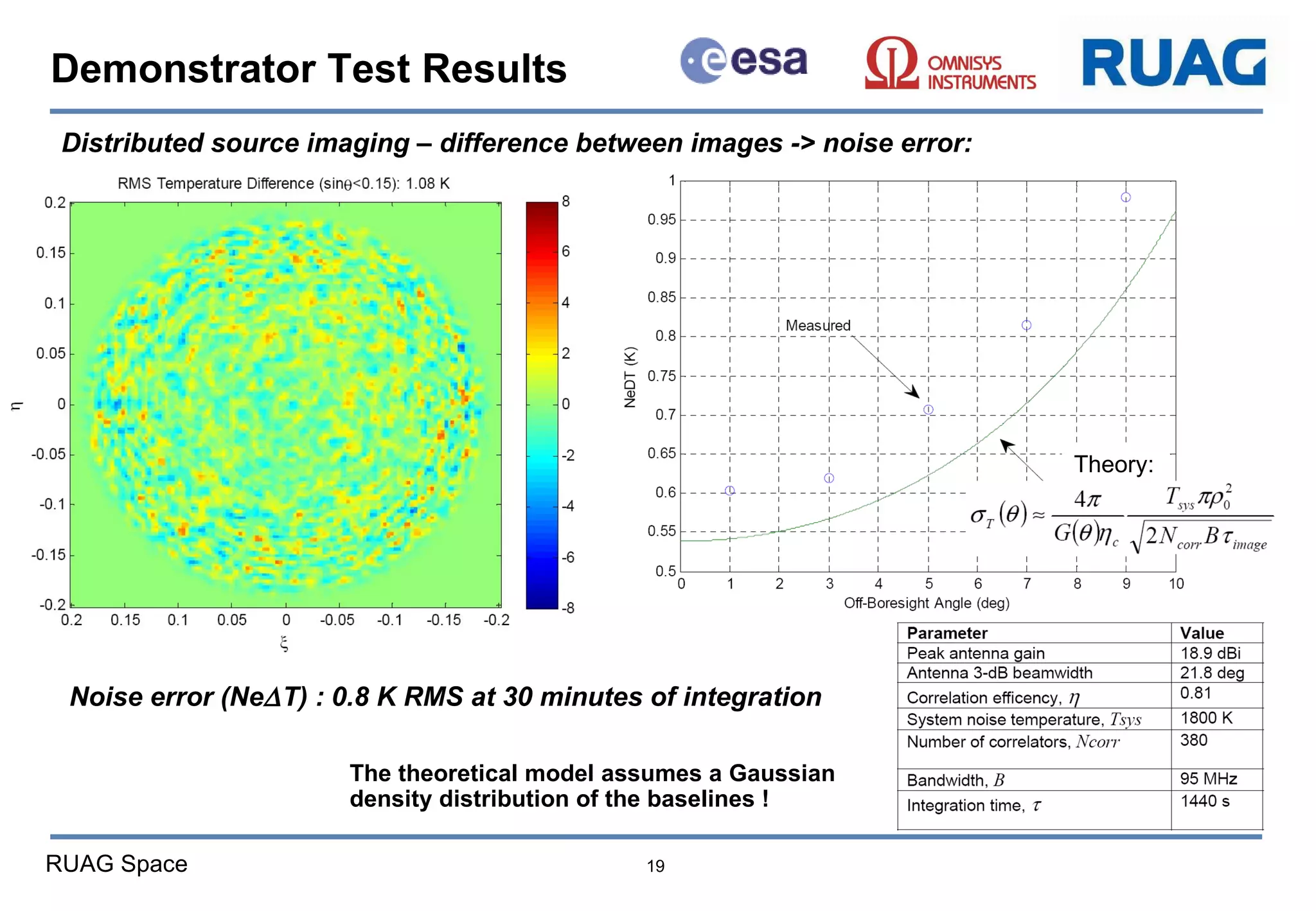
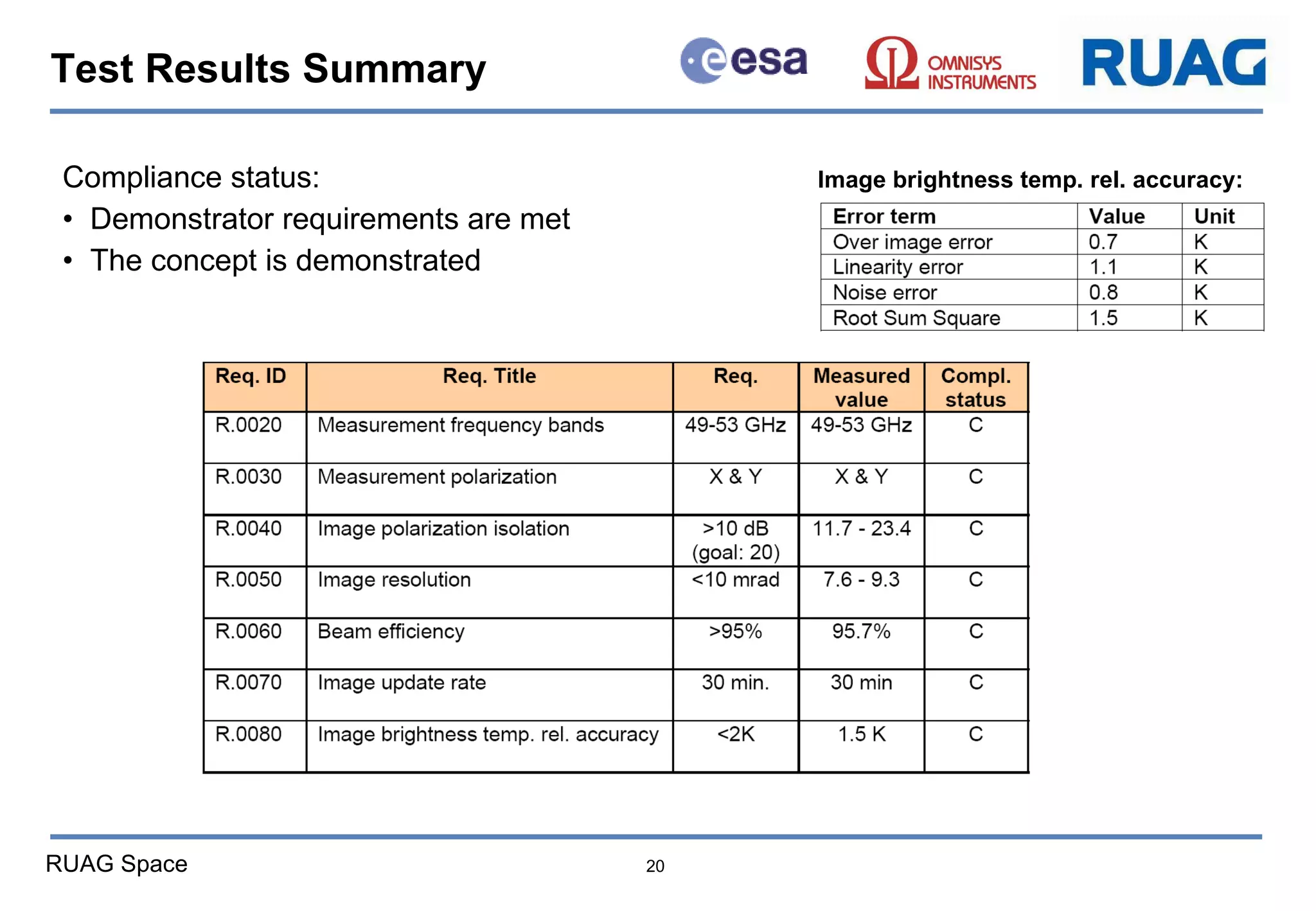
The document summarizes the results of a demonstration test for the GEO Atmospheric Sounder (GAS) concept. The test met key requirements, including image resolution <10 mrad, beam efficiency >95%, relative temperature accuracy <2K, and polarization isolation >10 dB. It used a rotating interferometer with 21 dual-polarization receivers to image calibration sources and the sun. The results validated the interferometer concept and showed agreement with theoretical models.