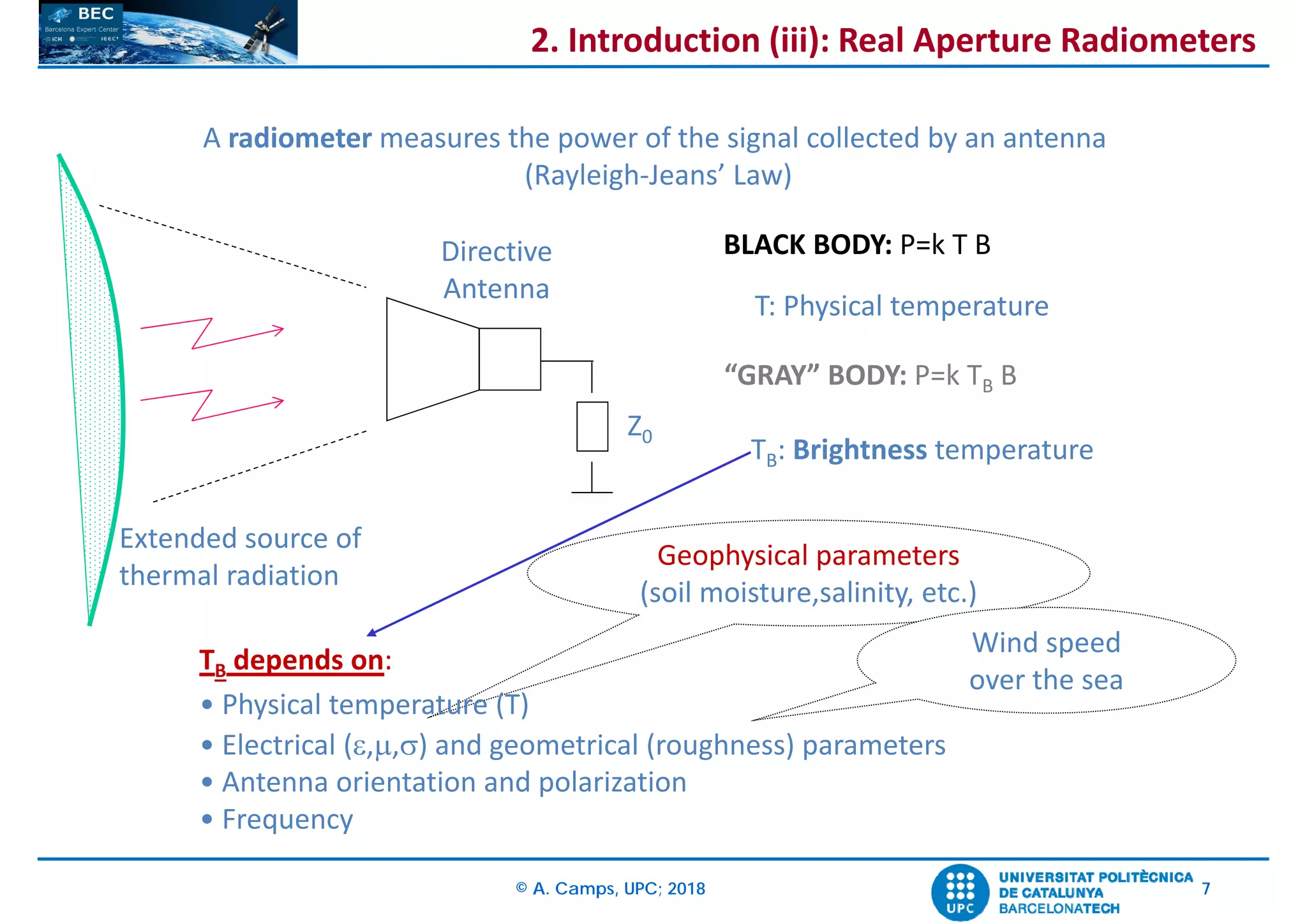
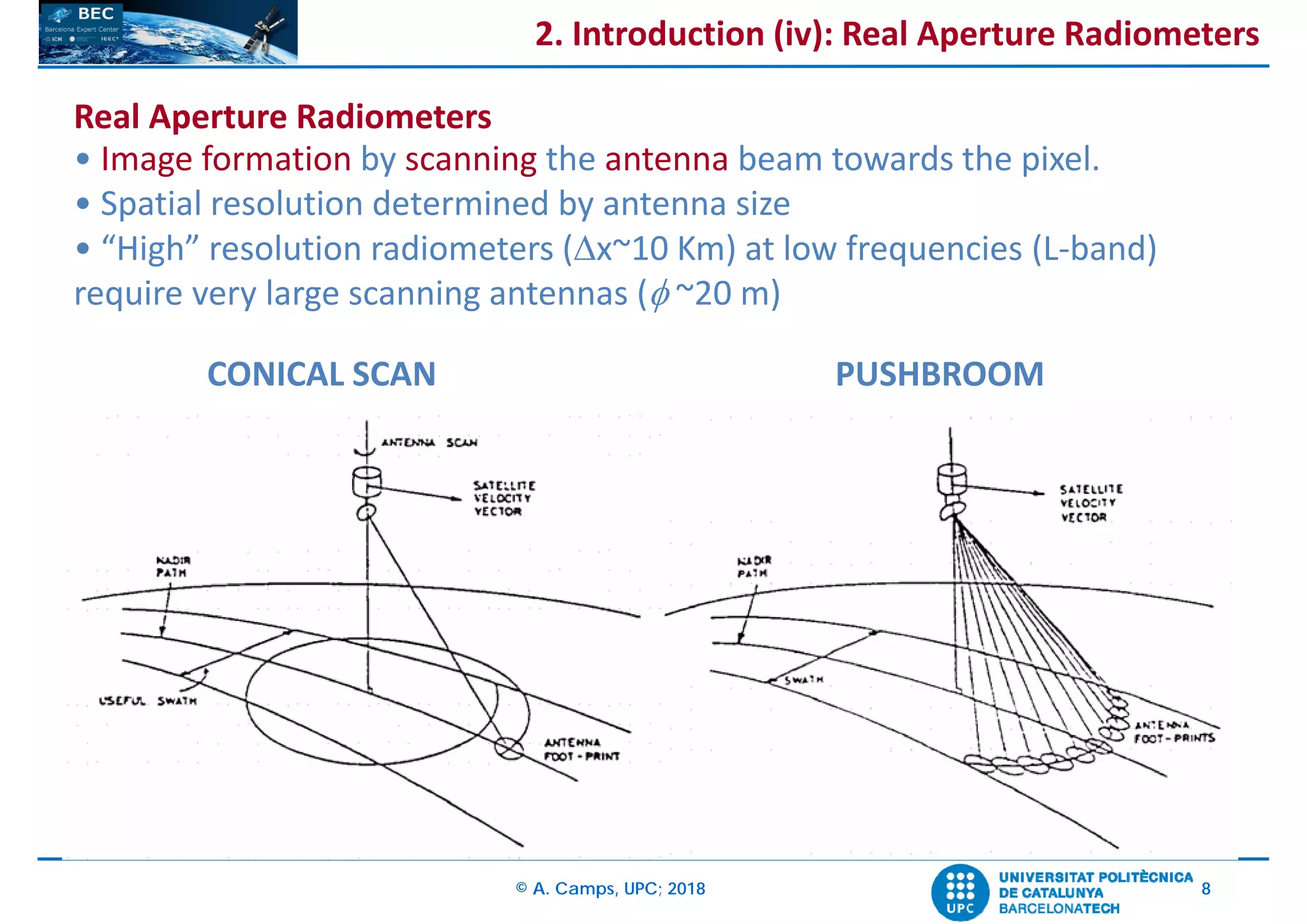
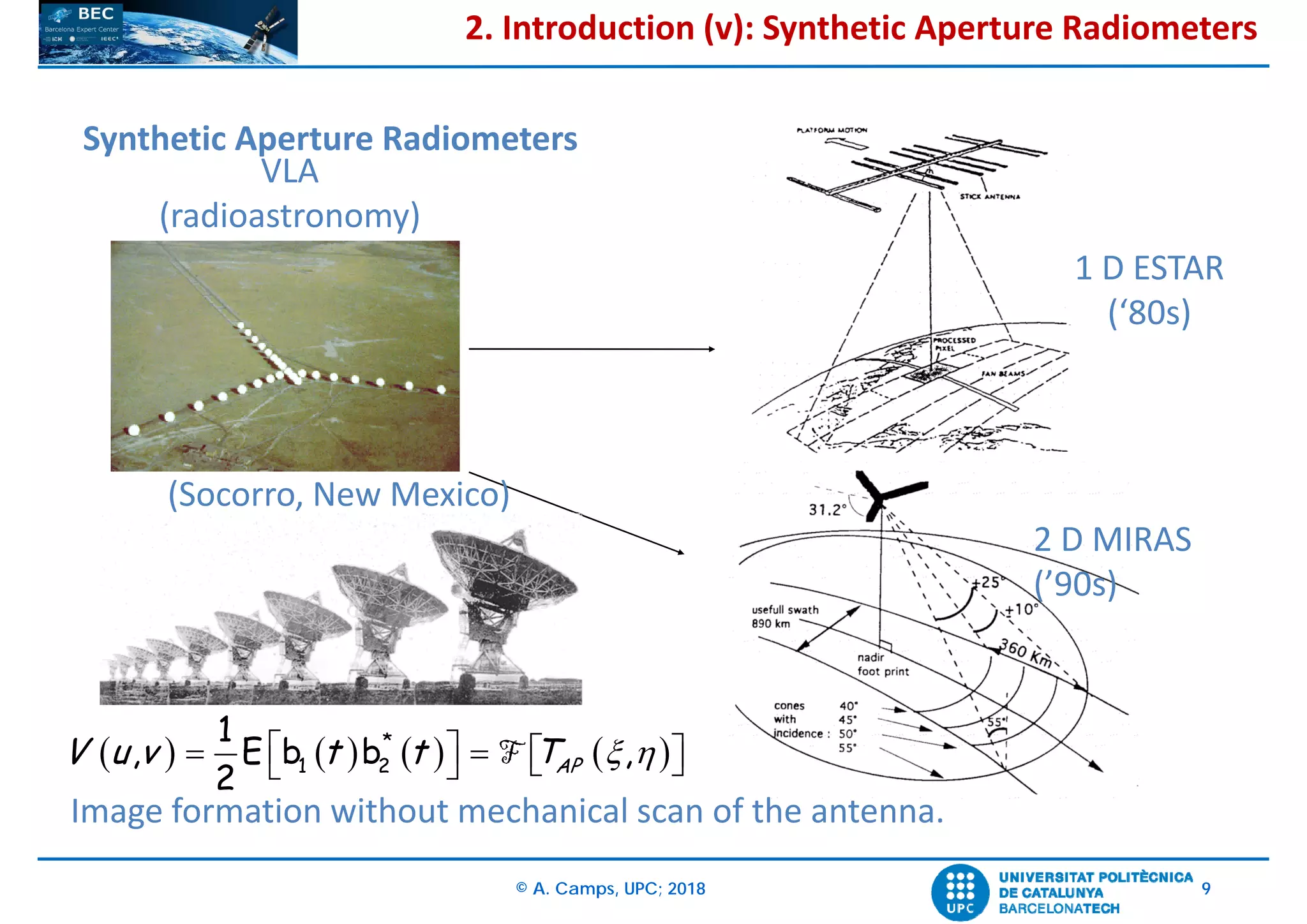
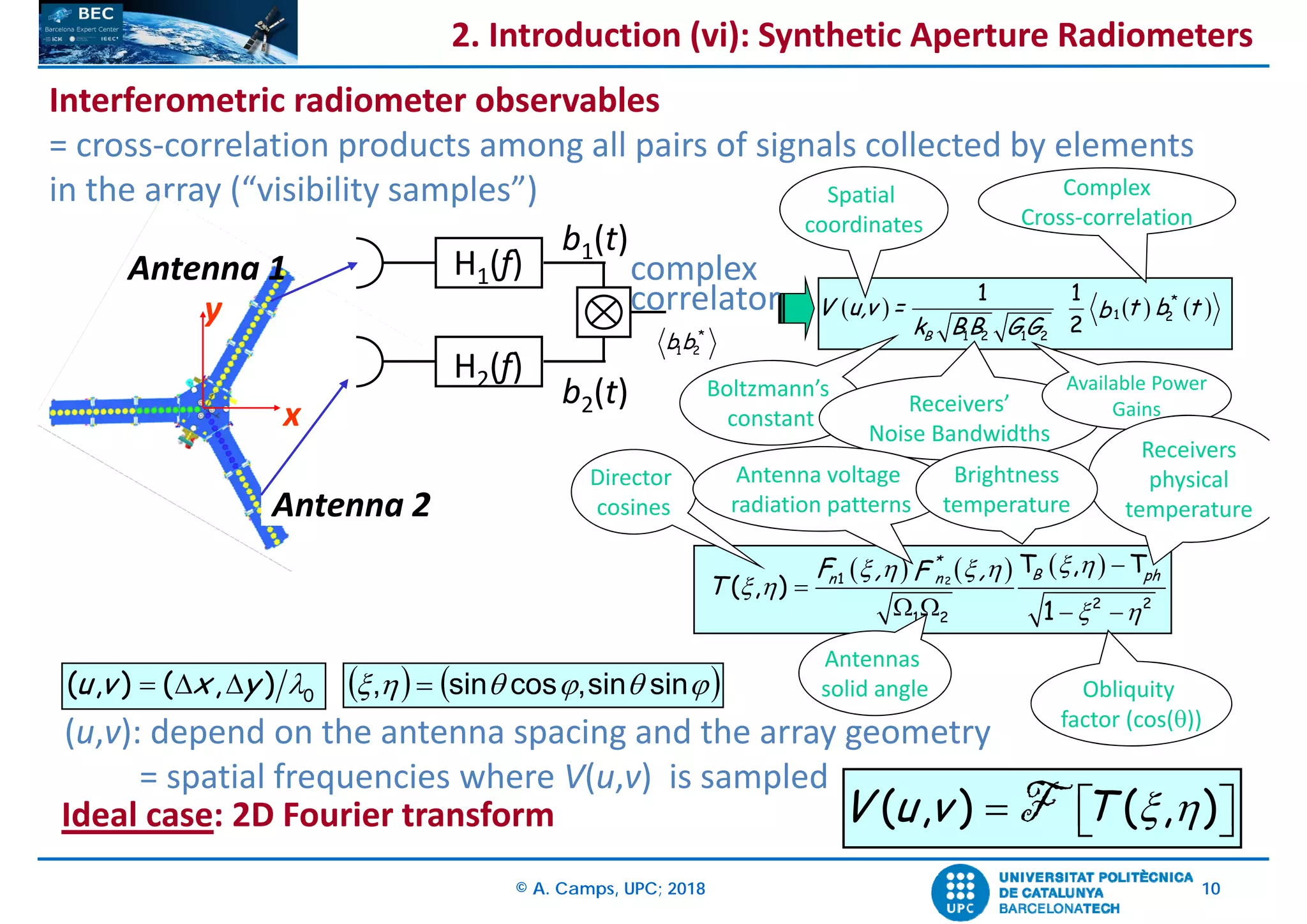
The document presents an overview of the Soil Moisture and Ocean Salinity (SMOS) mission by ESA, detailing its principles of operation and applications for soil moisture retrieval and salinity mapping. It covers relevant concepts in microwave radiometry, introduces different types of radiometers, and explains the mission's goals, including the collection of global soil moisture and ocean salinity data. Additionally, the document discusses technical aspects such as data processing levels, image reconstruction challenges, and the role of the mission in climate prediction and agriculture.
![© A. Camps, UPC; 2018 18
Antenna Positions Spatial frequencies (u,v) Periodic extension
2
2 2
,
( , )
1
B ph recn
T TF ,
T
( , ) ( , )V u v T F
u
v
x [wavelengths]
y[wavelengths]
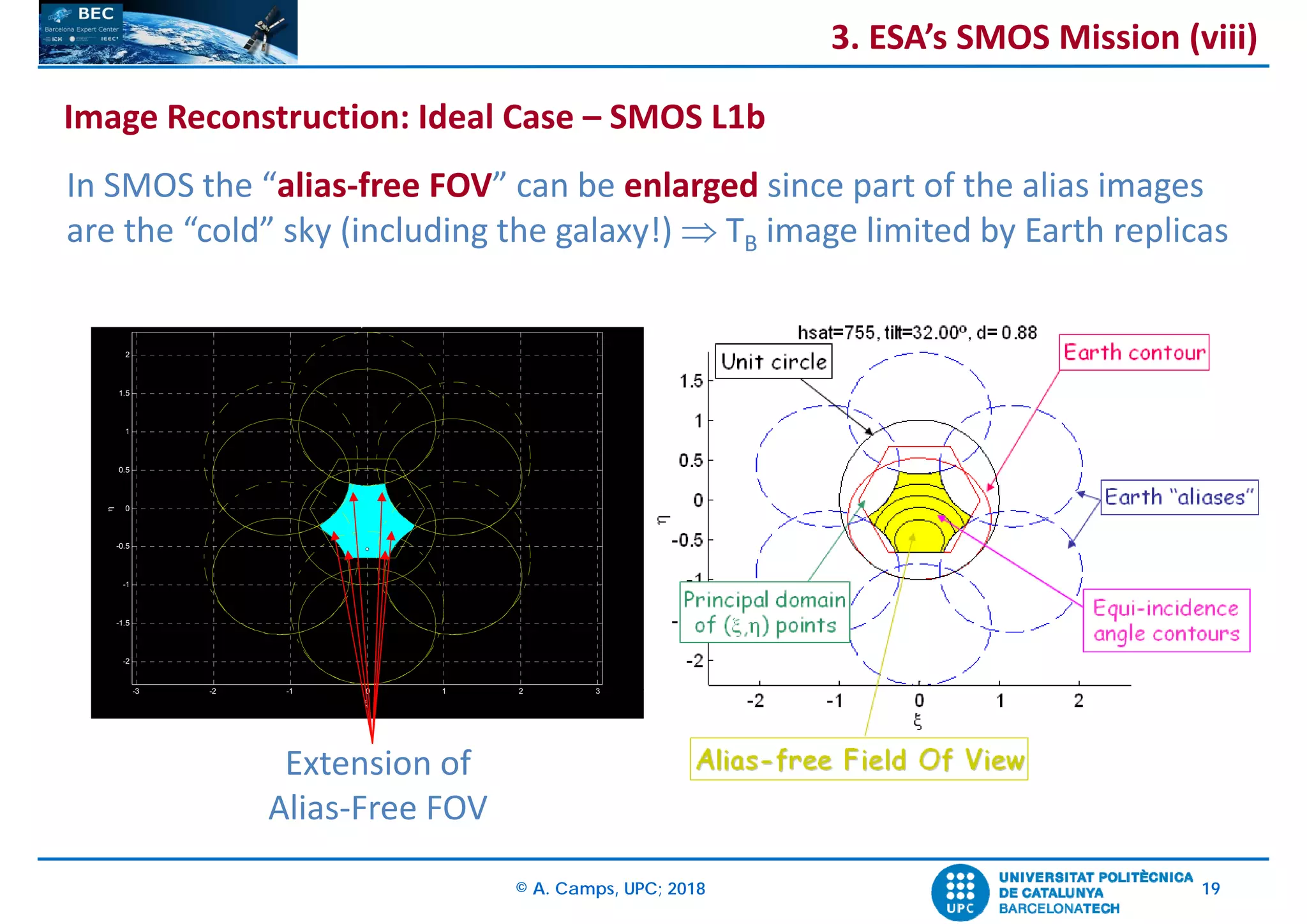
Image Reconstruction: Ideal Case – SMOS L1b
3. ESA’s SMOS Mission (vii)](https://image.slidesharecdn.com/smosprinciplesandapplicationsacamps2-180520185800/75/ESA-SMOS-Soil-Moisture-and-Ocean-Salinity-Mission-Principles-of-Operation-and-Applications-18-2048.jpg)
![© A. Camps, UPC; 2018 23
Brightness temperatures in the fundamental hexagon of a snapshot over the Atlantic Ocean
strongly affected by an RFI (Radio Frequency Interference) produced by a ship, Y-
polarization. Left, nominal TB; right, nodal sampling TB (Brightness Temperature). A clear
reduction of the general ripples and the sidelobes along the RFI directions can be
appreciated using the nodal sampling technique.
[http://scientiamarina.revistas.csic.es/index.php/scientiamarina/article/view/1667/2162]
RFI mitigation by “nodal sampling”
3. ESA’s SMOS Mission (xii)
Image Reconstruction: The RFI problem (iv)](https://image.slidesharecdn.com/smosprinciplesandapplicationsacamps2-180520185800/75/ESA-SMOS-Soil-Moisture-and-Ocean-Salinity-Mission-Principles-of-Operation-and-Applications-23-2048.jpg)
![© A. Camps, UPC; 2018 33
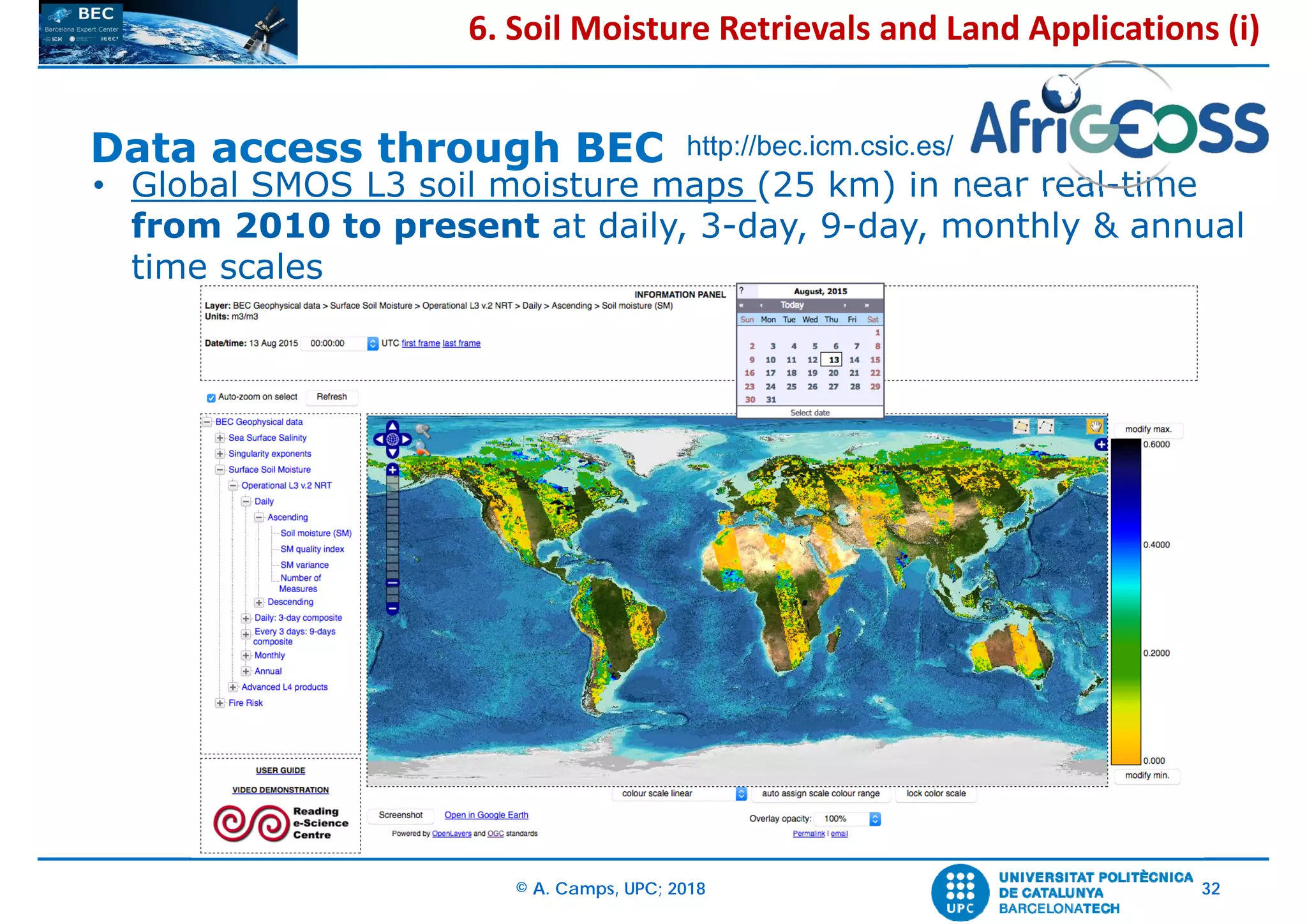
global soil
moisture maps
SMOS data is received in real time (<2h) & BEC produces:
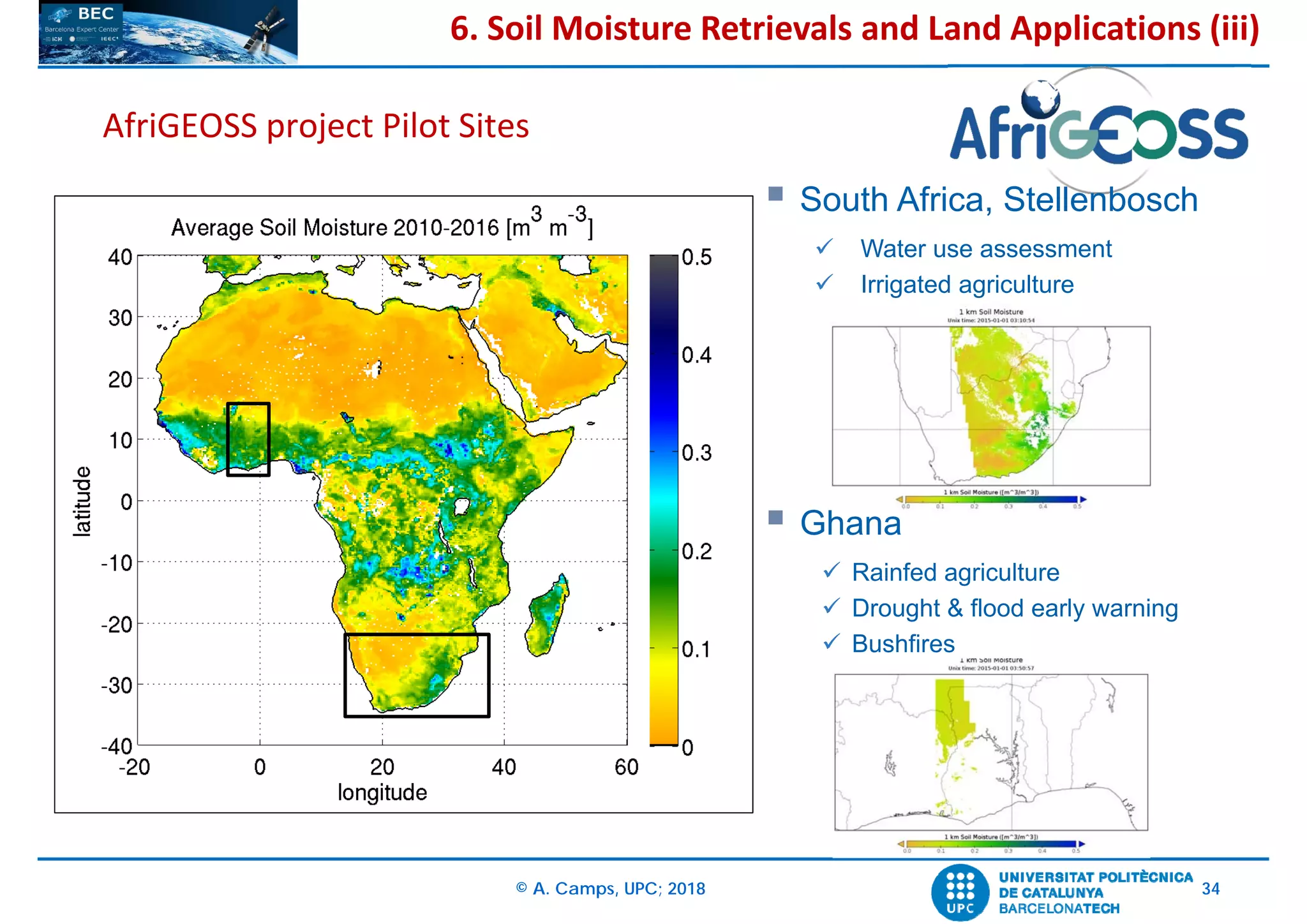
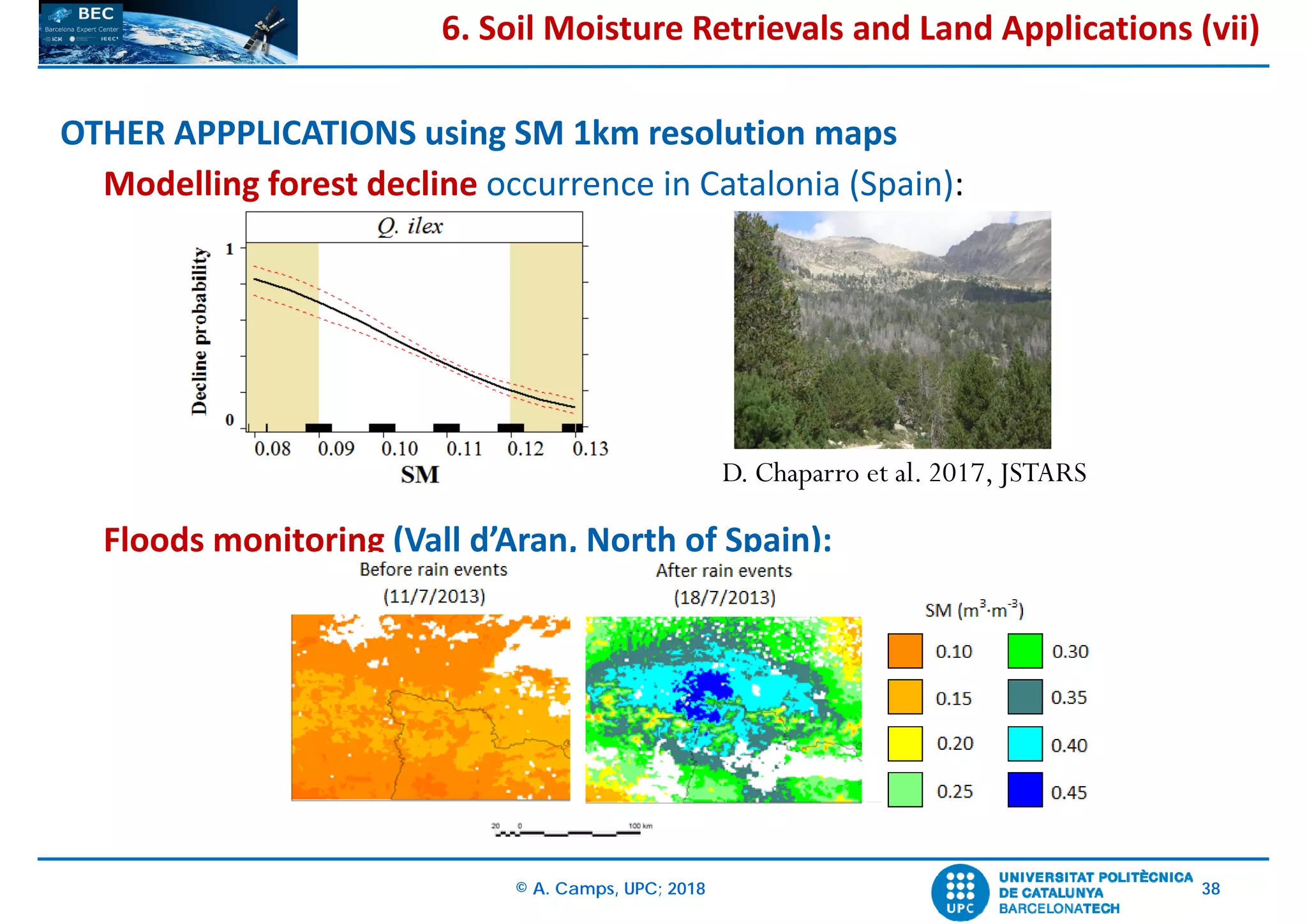
• Global SMOS soil moisture maps (25 km)
• High resolution SMOS/MODIS soil moisture maps (1 km) over 3 pilot sites: IP,
Ghana, South Africa [Piles et al., JSTARS 2015]
high resolution soil
moisture maps
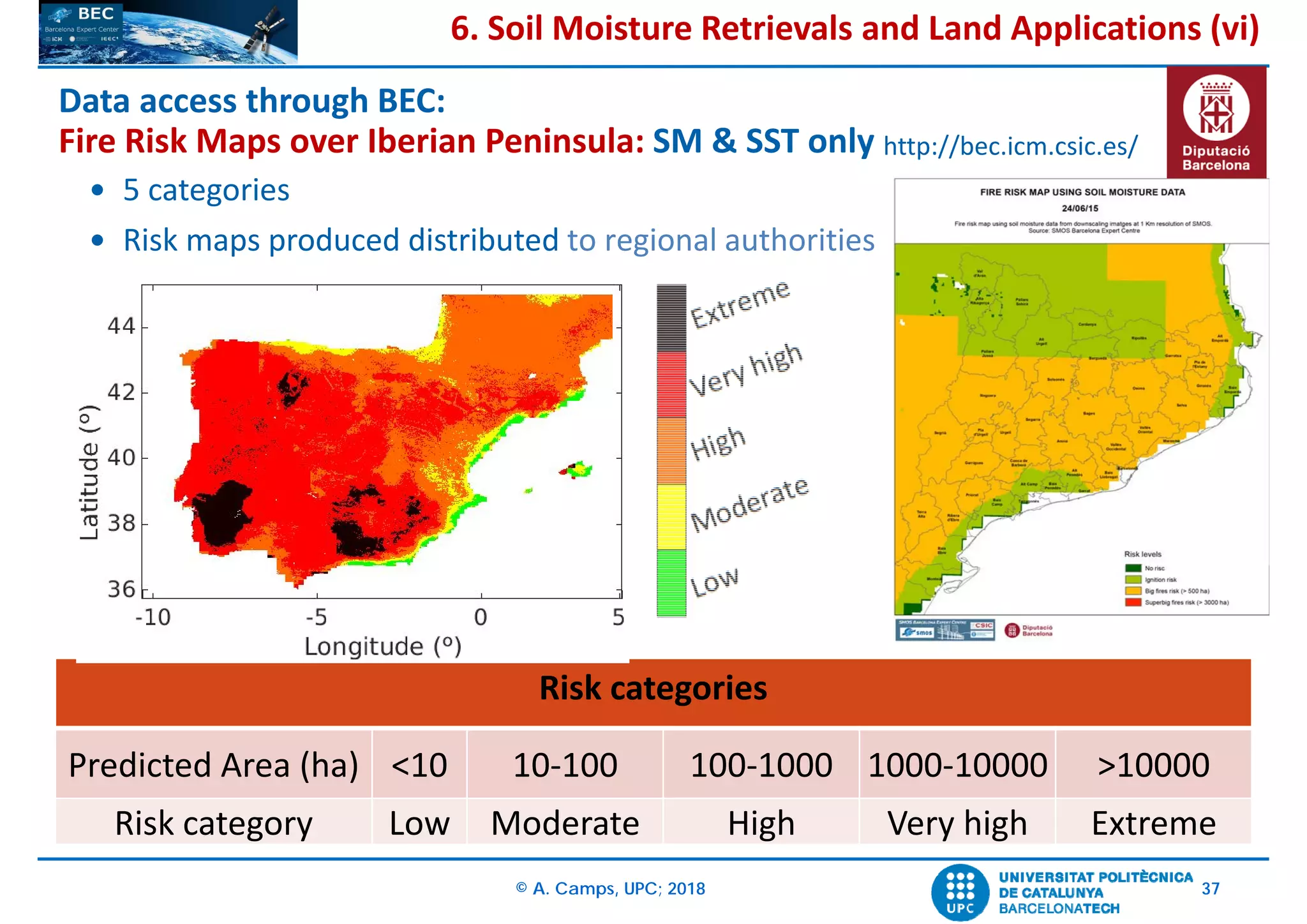
Data access through BEC http://bec.icm.csic.es/
6. Soil Moisture Retrievals and Land Applications (ii)](https://image.slidesharecdn.com/smosprinciplesandapplicationsacamps2-180520185800/75/ESA-SMOS-Soil-Moisture-and-Ocean-Salinity-Mission-Principles-of-Operation-and-Applications-33-2048.jpg)