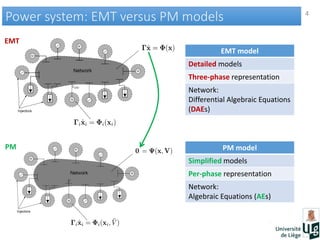
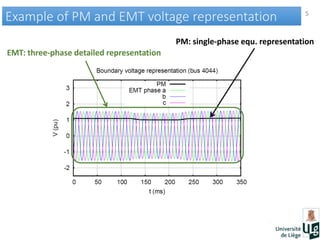
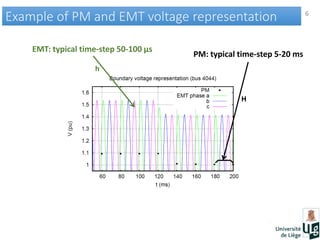
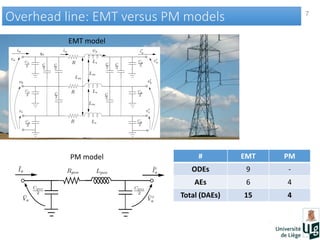
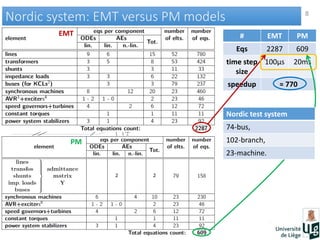
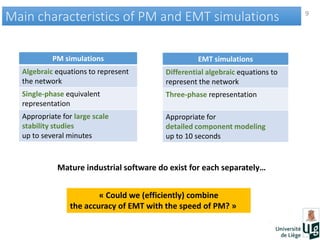
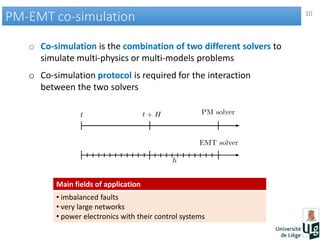
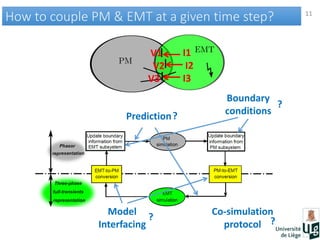
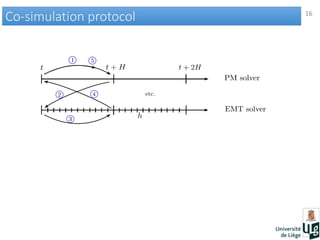
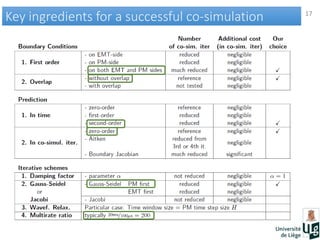
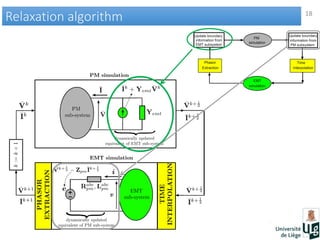
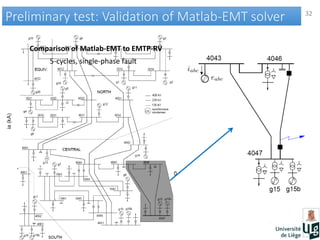
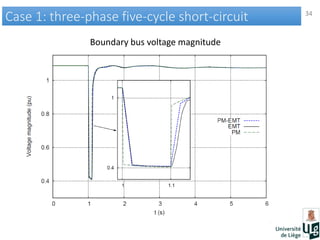
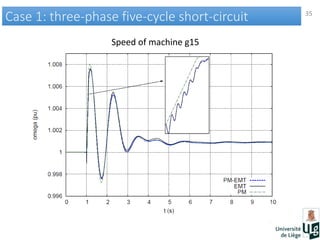
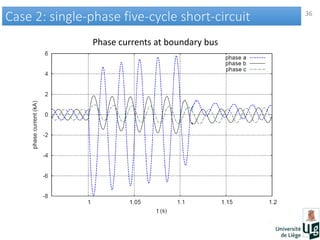
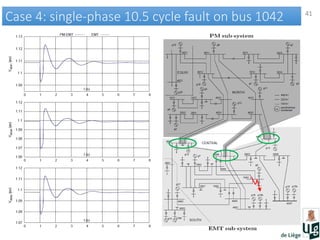
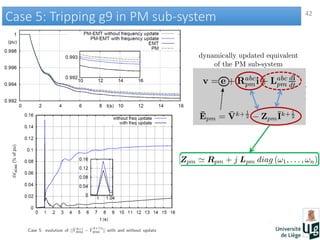
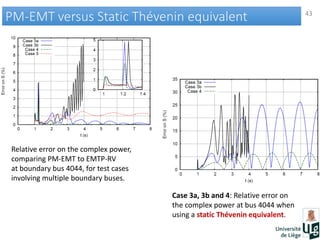
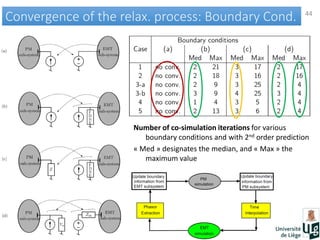
This document discusses co-simulation of electromagnetic transient (EMT) and phasor models for electric power system simulation. It presents methods for interfacing EMT and phasor models, including the use of dynamically updated Thevenin-Norton equivalents as boundary conditions and linear interpolation or least squares fitting for signal extraction. Several test cases demonstrate the approach on a 74-bus power system with single and multiple interface buses. The results show the co-simulation technique can accurately reproduce transient behaviors like oscillations and voltage fluctuations during faults.