Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
marsee101
PDF, PPTX
3,463 views
Fpga robot car
FPGAに実装したCNNを使用して白線間を走行するミニ・ロボットカーの製作
Technology
◦
Read more
3
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 15
2
/ 15
3
/ 15
4
/ 15
5
/ 15
6
/ 15
7
/ 15
8
/ 15
9
/ 15
10
/ 15
11
/ 15
12
/ 15
13
/ 15
14
/ 15
15
/ 15
More Related Content
PDF
2値ディープニューラルネットワークと組込み機器への応用: 開発中のツール紹介
by
Hiroki Nakahara
PDF
2値化CNN on FPGAでGPUとガチンコバトル(公開版)
by
Hiroki Nakahara
PDF
FPGA, AI, エッジコンピューティング
by
Hideo Terada
PDF
NN系学習済みモデルをFPGAに実装してみた
by
Imaoka Micihihiro
PDF
Tensor flow usergroup 2016 (公開版)
by
Hiroki Nakahara
PDF
(公開版)Reconf研2017GUINNESS
by
Hiroki Nakahara
PDF
nishimura m
by
harmonylab
PDF
SBRA2018講演資料
by
Hiroki Nakahara
2値ディープニューラルネットワークと組込み機器への応用: 開発中のツール紹介
by
Hiroki Nakahara
2値化CNN on FPGAでGPUとガチンコバトル(公開版)
by
Hiroki Nakahara
FPGA, AI, エッジコンピューティング
by
Hideo Terada
NN系学習済みモデルをFPGAに実装してみた
by
Imaoka Micihihiro
Tensor flow usergroup 2016 (公開版)
by
Hiroki Nakahara
(公開版)Reconf研2017GUINNESS
by
Hiroki Nakahara
nishimura m
by
harmonylab
SBRA2018講演資料
by
Hiroki Nakahara
Similar to Fpga robot car
PDF
エヌビディアが加速するディープラーニング ~進化するニューラルネットワークとその開発方法について~
by
NVIDIA Japan
PDF
FPGAX2016 ドキュンなFPGA
by
Hiroki Nakahara
PPTX
AI robot car
by
Akira Sasaki
PPTX
研究者のための Python による FPGA 入門
by
ryos36
PDF
FPGAをロボット(ROS)で「やわらかく」使うには
by
Hideki Takase
PPTX
Image net classification with Deep Convolutional Neural Networks
by
Shingo Horiuchi
PDF
「ゼロから作るDeep learning」の畳み込みニューラルネットワークのハードウェア化
by
marsee101
PDF
Chainerの使い方と自然言語処理への応用
by
Seiya Tokui
PDF
(2021年8月版)深層学習によるImage Classificaitonの発展
by
Takumi Ohkuma
PPTX
Densely Connected Convolutional Networks
by
harmonylab
PDF
【Deep Learning】AlexNetの解説&実装 by PyTorch (colabリンク付き)
by
Daichi Hayashi
PDF
16th_ACRi_Webinar_Kumamoto-Univ_Okawa_20240308.pdf
by
直久 住川
PDF
Attempt of implementation of neural network model on FPGA
by
Imaoka Micihihiro
PDF
SAS Viyaのディープラーニングを用いた物体検出
by
SAS Institute Japan
PDF
DeepLearningDay2016Summer
by
Takayoshi Yamashita
PPTX
LUT-Network Revision2
by
ryuz88
PDF
TAI_GDEP_Webinar_1a_27Oct2020
by
ssuser5b12d1
PPTX
2020 08-01 ALGYAN AI&ロボティクス (1)
by
Akira Tateishi
PDF
機械学習プロ生20151121
by
なおき きしだ
PDF
深層学習 - 画像認識のための深層学習 ①
by
Shohei Miyashita
エヌビディアが加速するディープラーニング ~進化するニューラルネットワークとその開発方法について~
by
NVIDIA Japan
FPGAX2016 ドキュンなFPGA
by
Hiroki Nakahara
AI robot car
by
Akira Sasaki
研究者のための Python による FPGA 入門
by
ryos36
FPGAをロボット(ROS)で「やわらかく」使うには
by
Hideki Takase
Image net classification with Deep Convolutional Neural Networks
by
Shingo Horiuchi
「ゼロから作るDeep learning」の畳み込みニューラルネットワークのハードウェア化
by
marsee101
Chainerの使い方と自然言語処理への応用
by
Seiya Tokui
(2021年8月版)深層学習によるImage Classificaitonの発展
by
Takumi Ohkuma
Densely Connected Convolutional Networks
by
harmonylab
【Deep Learning】AlexNetの解説&実装 by PyTorch (colabリンク付き)
by
Daichi Hayashi
16th_ACRi_Webinar_Kumamoto-Univ_Okawa_20240308.pdf
by
直久 住川
Attempt of implementation of neural network model on FPGA
by
Imaoka Micihihiro
SAS Viyaのディープラーニングを用いた物体検出
by
SAS Institute Japan
DeepLearningDay2016Summer
by
Takayoshi Yamashita
LUT-Network Revision2
by
ryuz88
TAI_GDEP_Webinar_1a_27Oct2020
by
ssuser5b12d1
2020 08-01 ALGYAN AI&ロボティクス (1)
by
Akira Tateishi
機械学習プロ生20151121
by
なおき きしだ
深層学習 - 画像認識のための深層学習 ①
by
Shohei Miyashita
More from marsee101
PDF
Ultra96 pmod expansion board
by
marsee101
PDF
Robot car gabor_filter
by
marsee101
PDF
FPGAスタートアップ資料
by
marsee101
PDF
Vivado hls勉強会5(axi4 stream)
by
marsee101
PPTX
ラプラシアンフィルタをZedBoardで実装(ソフトウェアからハードウェアにオフロード)
by
marsee101
PDF
Vivado hls勉強会3(axi4 lite slave)
by
marsee101
PPTX
Ubuntuをインストールしたzyboボードにカメラを付けてopen cvで顔認識
by
marsee101
PDF
FPGAの部屋、slide share、xilinxツールのご紹介
by
marsee101
PDF
Vivado hls勉強会4(axi4 master)
by
marsee101
PDF
Pynqでカメラ画像をリアルタイムfastx コーナー検出
by
marsee101
PDF
高位合成ツールVivado hlsのopen cv対応
by
marsee101
PDF
Vivado hls勉強会2(レジスタの挿入とpipelineディレクティブ)
by
marsee101
ODP
MPSoCのPLの性能について
by
marsee101
PDF
Vivado hlsのシミュレーションとhlsストリーム
by
marsee101
PDF
Vivado hls勉強会1(基礎編)
by
marsee101
PDF
Fpgaでの非同期信号の扱い方とvivadoによるサポート(公開用)
by
marsee101
PDF
Camera input from_ultra_96's_slow_expansion_connector
by
marsee101
PDF
SDSoC勉強会_170128_スライド「SDx 2016.3のプラグマによるハードウェアと性能」
by
marsee101
Ultra96 pmod expansion board
by
marsee101
Robot car gabor_filter
by
marsee101
FPGAスタートアップ資料
by
marsee101
Vivado hls勉強会5(axi4 stream)
by
marsee101
ラプラシアンフィルタをZedBoardで実装(ソフトウェアからハードウェアにオフロード)
by
marsee101
Vivado hls勉強会3(axi4 lite slave)
by
marsee101
Ubuntuをインストールしたzyboボードにカメラを付けてopen cvで顔認識
by
marsee101
FPGAの部屋、slide share、xilinxツールのご紹介
by
marsee101
Vivado hls勉強会4(axi4 master)
by
marsee101
Pynqでカメラ画像をリアルタイムfastx コーナー検出
by
marsee101
高位合成ツールVivado hlsのopen cv対応
by
marsee101
Vivado hls勉強会2(レジスタの挿入とpipelineディレクティブ)
by
marsee101
MPSoCのPLの性能について
by
marsee101
Vivado hlsのシミュレーションとhlsストリーム
by
marsee101
Vivado hls勉強会1(基礎編)
by
marsee101
Fpgaでの非同期信号の扱い方とvivadoによるサポート(公開用)
by
marsee101
Camera input from_ultra_96's_slow_expansion_connector
by
marsee101
SDSoC勉強会_170128_スライド「SDx 2016.3のプラグマによるハードウェアと性能」
by
marsee101
Recently uploaded
PDF
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
by
NorihiroSunada
PDF
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
by
Evolve LLC.
PPTX
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
by
Kiyohide Yamaguchi
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
by
Tasuku Takahashi
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
by
Tasuku Takahashi
PDF
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
by
Masaki Yamakawa
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
by
NorihiroSunada
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
by
Evolve LLC.
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
by
Kiyohide Yamaguchi
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
by
Tasuku Takahashi
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
by
Tasuku Takahashi
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
by
Masaki Yamakawa
Fpga robot car
1.
FPGAに実装したCNNを使用して白線間 を走行するミニ・ロボットカーの製作 筑波大学システム情報系技術室 小野 雅晃 1 本研究は,科学研究費補助金「奨励研究」(課題番号17H00372)の助成を受けて 行った
2.
自己紹介 2 FPGAの部屋 2005年5月から
4,141記事(2018 年4月21日現在) 筑波大学、技術 職員 今年60歳、還暦 定年退職
3.
CNNで白線間を認識して走る ミニ・ロボットカー 平成28年度 カメラを使用した画像認識により白線間を走行するロ ボットカーの製作
ガボール・フィルタにより、白線を認識して走るミニ・ロボッ トカーを発表 平成29年度 ガボール・フィルタによる白線認識を、畳み込み ニューラルネットワーク(CNN)に変更した カメラ画像をCNNで解析し白線間を走行 CNNはFPGAに実装した 3
4.
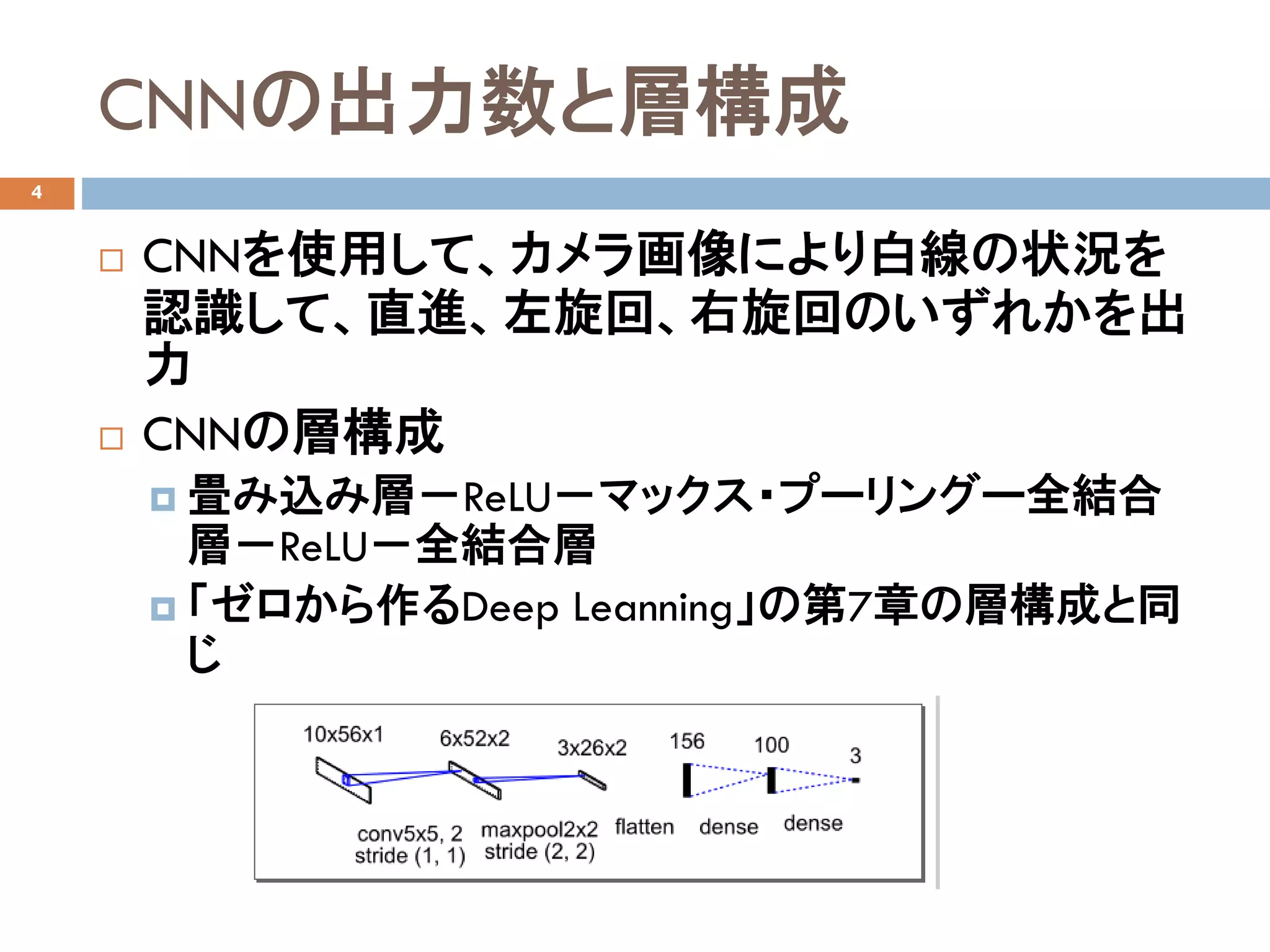
CNNの出力数と層構成 CNNを使用して、カメラ画像により白線の状況を 認識して、直進、左旋回、右旋回のいずれかを出 力 CNNの層構成
畳み込み層-ReLU-マックス・プーリングー全結合 層-ReLU-全結合層 「ゼロから作るDeep Leanning」の第7章の層構成と同 じ 4
5.
CNNの学習と推論のベース 5 学習は「ゼロから作る Deep Learning」のPython コードをそのまま利用
推論の「ゼロから作る Deep Learning」のPython コードを適当なビット幅に 量子化するように変更し て精度を確認 複数のビット幅で精度を 確認 オライリー・ジャパン 「ゼロから作る Deep Learning」の表紙を引用
6.
量子化方法(全結合層の場合) 6 学習はそのまま浮動小数点演算で学習 推論のみ
重みとバイアス、層の出力を量子化 量子化方法(forward_int()) 小数部のビット分を掛け算(float型) 四捨五入してint型に変換し、小数点以下切り捨て 量子化ビット長で飽和演算 float型に変換 掛け算した分を割り算で戻す(float) 量子化した値で内積を取る(float演算) 再び量子化
7.
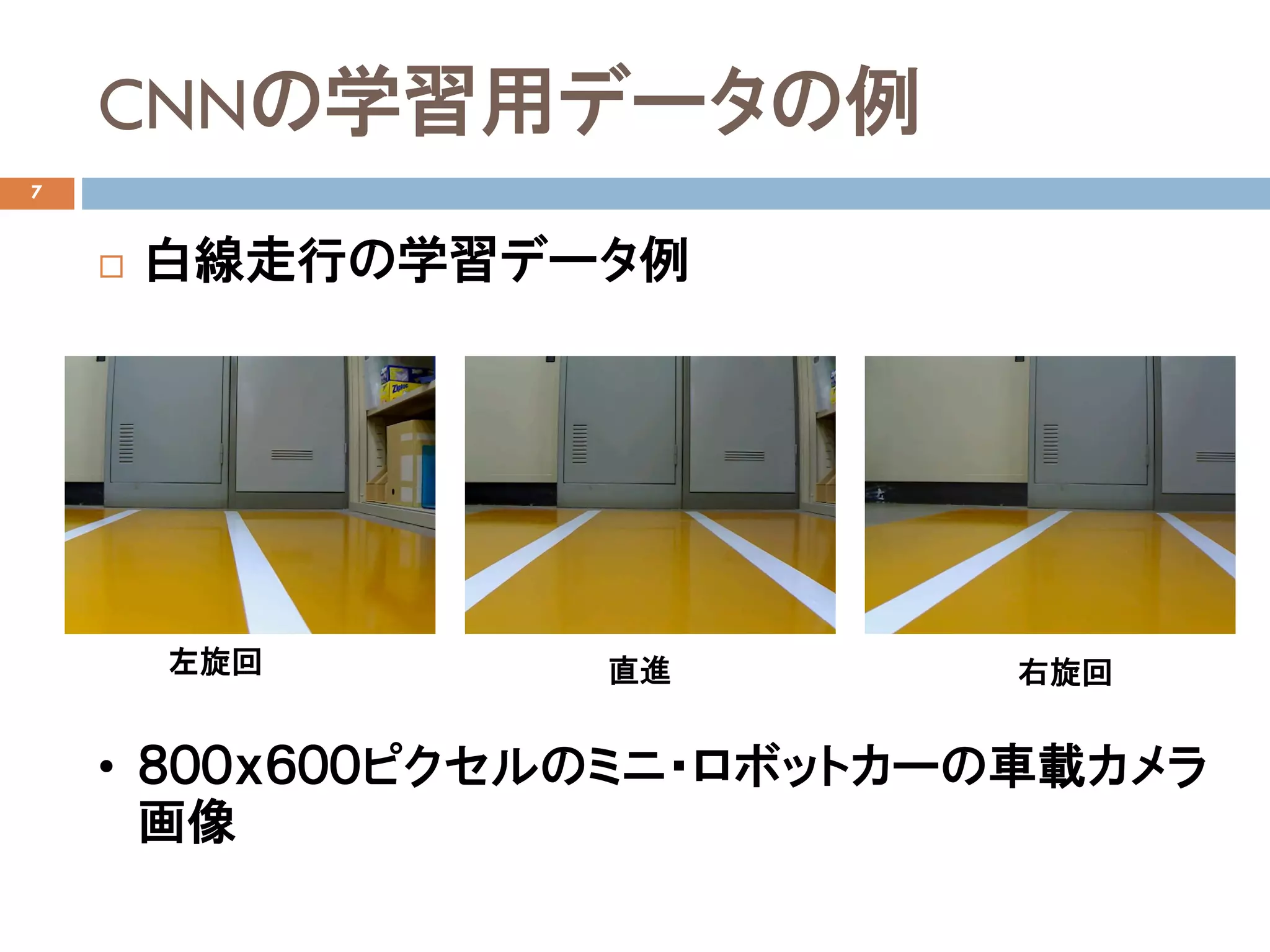
CNNの学習用データの例 7 白線走行の学習データ例 左旋回 直進
右旋回 • 800x600ピクセルのミニ・ロボットカーの車載カメラ 画像
8.
白線データの用意 8 77枚の学習画像と74枚のテスト画像を別に用意 (800x600ピクセル) 画像を加工して増やす(imagemagic)
コントラストを変更 ぼかす ノイズを加える(ガウス、インパルス、ラプラシアン) 学習画像-1,386枚、テスト画像ー1,332枚 サイズ変更(60X45ピクセル) 0.075倍 白黒変換 白線の部分を切り取る(56X10ピクセル) 1枚の画像につき25枚 学習画像ー34,650枚、テスト画像ー33,300枚 精度は93%程度
9.
Vivado HLSを使用してCからHDLへ 9 CNNの推論をCで書き直した
Vivado HLS(Xilinx社のFPGA用高位合成ツール)を使 用してCコードをHDLに変換してIP化した 重みやバイアスはCのヘッダとして実装 直進、左旋回、右旋回という情報を出力するCNNのIP (Intellectual Property)コアを作成 推論時間約1.94ms、515fps チューニング後の推論時間約96.3us、10,400fps 約20倍高速になった(オーバースペック) ただしチューニング後のCNN IPは実機では未検証
10.
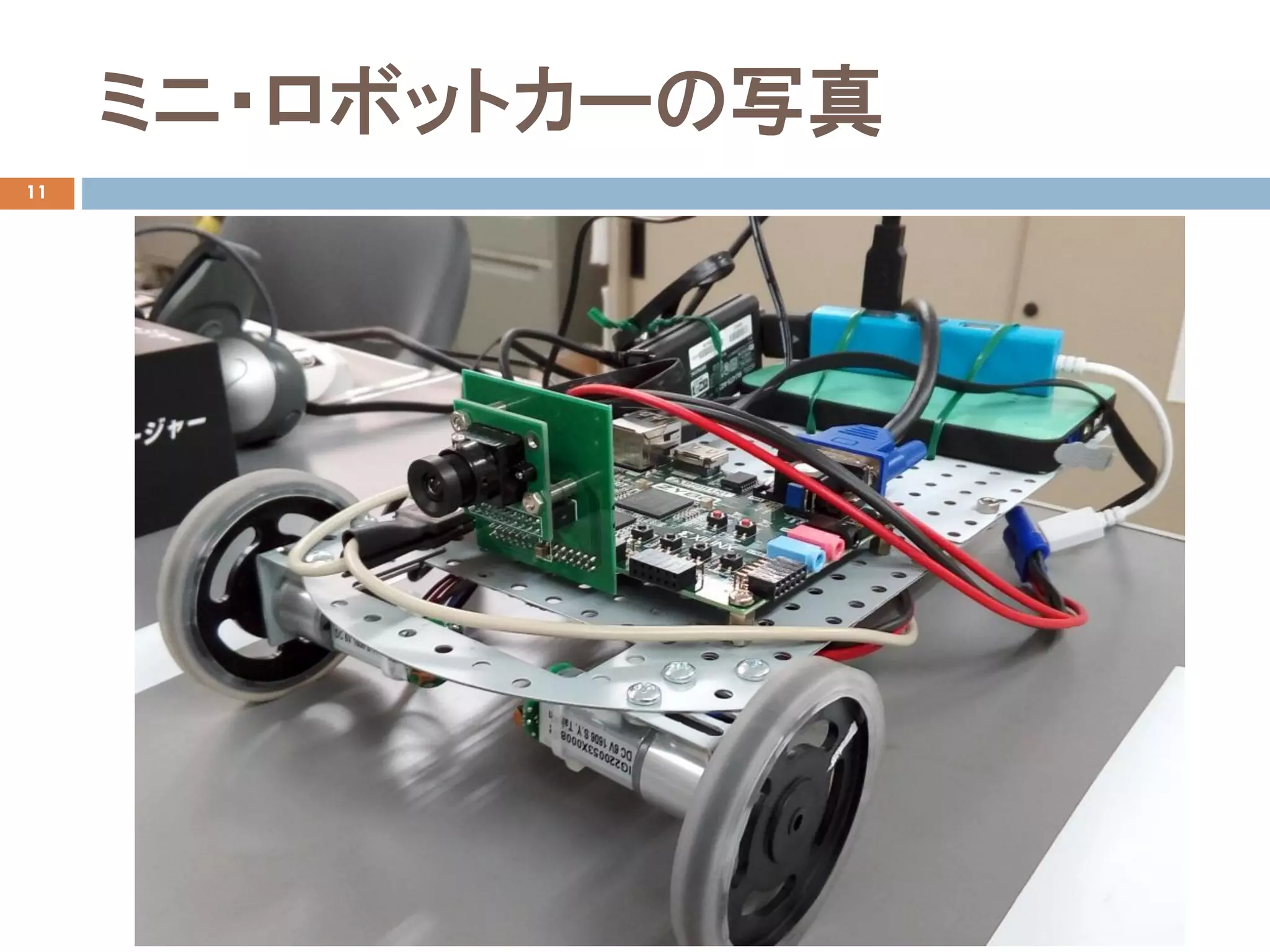
ミニ・ロボットカー 10 Digilent社のZYBOボードを使用した全長30cm程度 のロボットカー(ZYBOtベース) ハード(FPGA内の回路)、ソフト共に独自開発
ZYBOボード Xilinx社のARMプロセッサ(Cortex-A9デュアル)+ FPGAチップ Zynq-7010 2つのCortex-A9でUbuntu14.04が動作 ソフトウェア実装後にハードウェアにオフロードが簡 単に行える
11.
ミニ・ロボットカーの写真 11
12.
ミニ・ロボットカーのブロック図 12
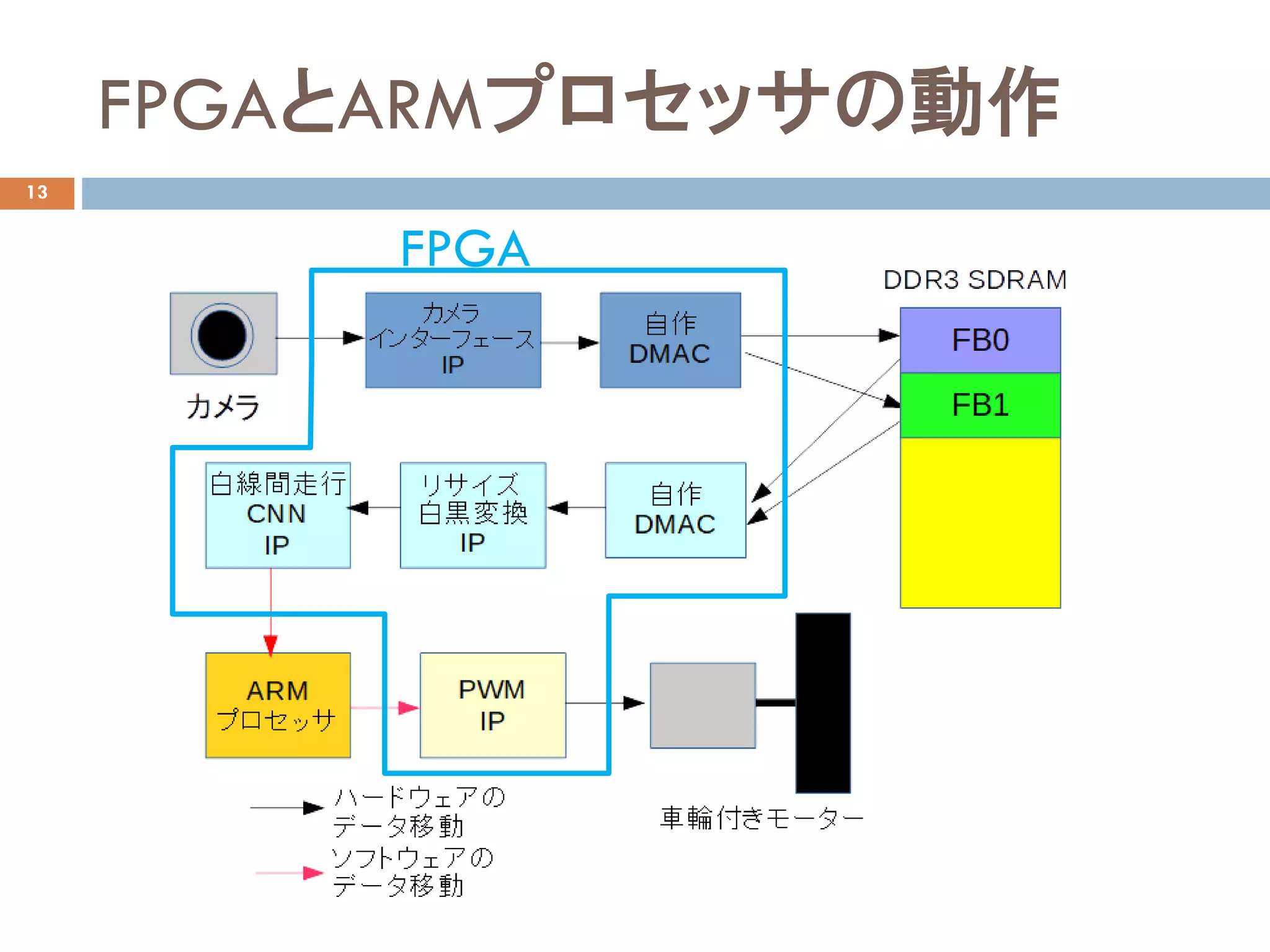
13.
FPGAとARMプロセッサの動作 13 FPGA
14.
動画デモ 14 動画デモは「カーブ、直線用白線間走行用畳み込みニューラ ルネットワーク18(ミニ・ロボットカーでの走行テスト)」参照 http://marsee101.blog19.fc2.com/blog-entry-4021.html
15.
まとめ 15 白線間走行用畳み込みニューラルネットワークを FPGAに実装 ミニ・ロボットカーに白線間走行用畳み込み ニューラルネットワークを搭載
ミニ・ロボットカーで白線間を走行することができ た
Download