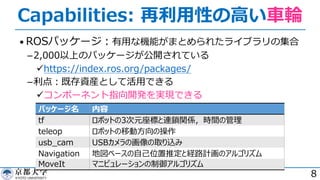
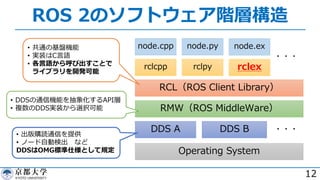
ROS 2の新機能
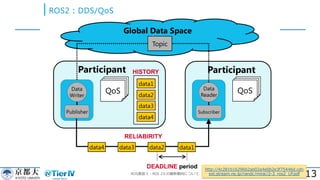
• DDS(Data Distribution Service)
• Quality of service
• Lifecycle state machine
• Actions
• Intra-process communication
• ros1bridge
• colcon build tool
• Python launch system
• Multi platform support
11
https://www.slideshare.net/takasehideki/
robot-operating-system-236990359/22
https://shop.cqpub.co.jp/hanbai/books/MTR/MTR202009.html
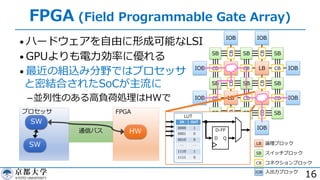
データセンター
• Microsoft Catapult
20出典︓A.Putnam, et al., A Reconfigurable Fabric for Accelerating Large-Scale Datacenter Services, ISCA, 2014.
A. Putnam, Large-Scale Reconfigurable Computing in a Microsoft Datacenter, HotChips26, 2014.
21.
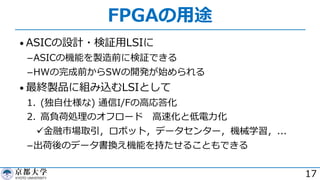
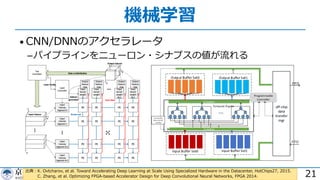
機械学習
• CNN/DNNのアクセラレータ
パイプラインをニューロン・シナプスの値が流れる
21出典︓K. Ovtcharov,et al. Toward Accelerating Deep Learning at Scale Using Specialized Hardware in the Datacenter, HotChips27, 2015.
C. Zhang, et al. Optimizing FPGA-based Accelerator Design for Deep Convolutional Neural Networks, FPGA 2014.
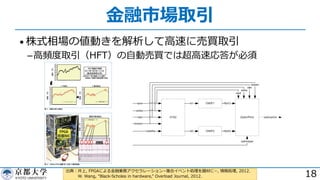
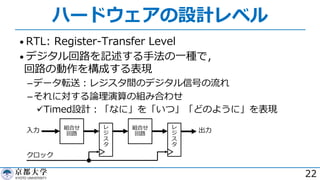
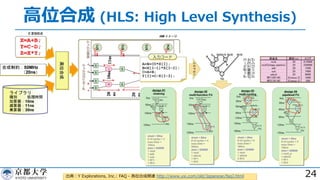
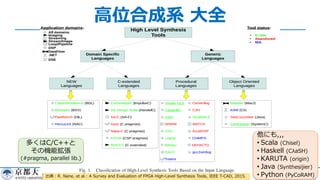
⾼位合成 (HLS: HighLevel Synthesis)
• 抽象度の⾼い動作記述からRTLを⽣成する技術
汎⽤プログラミング⾔語によって振る舞いを定義
「なに」を⾏うかに重点を置いて設計する
ソフトウェア志向の協調設計との親和性が⾼い
23
プロセッサ
通信バス
FPGA
func2
main
func1
int_t main () {
a = func1(xxx);
b = a + func2(yyy);
}
int func1(int x) {
…
return val;
}
int func2(int x) {
int a[N];
int i;
for(i=0;i<N;i++){
a[i] = ・・・;
:
}
}
x
func
i
a
func2
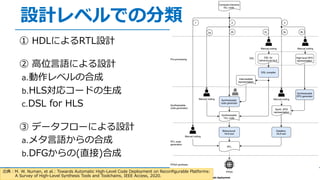
① HDLによるRTL設計
② ⾼位⾔語による設計
a.動作レベルの合成
b.HLS対応コードの⽣成
c.DSLfor HLS
③ データフローによる設計
a.メタ⾔語からの合成
b.DFGからの(直接)合成
25
設計レベルでの分類
出典︓M. W. Numan, et al.: Towards Automatic High-Level Code Deployment on Reconfigurable Platforms:
A Survey of High-Level Synthesis Tools and Toolchains, IEEE Access, 2020.



![ロボット
• Phenox: FPGA搭載ドローン
(Xilinx Zynq XC7Z010)
FPGAは主に信号処理を担う
19
• LOVOT
出典︓本郷⾶⾏機株式会社 - Phenoxプロジェクト http://phenoxlab.com/phenox2.html
テクノロジー | LOVOT[らぼっと] https://lovot.life/technology/](https://image.slidesharecdn.com/robosemi-20201218up-201218103816/85/FPGA-ROS-19-320.jpg)
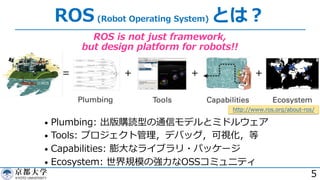
![⾼位合成 (HLS: High Level Synthesis)
• 抽象度の⾼い動作記述からRTLを⽣成する技術
汎⽤プログラミング⾔語によって振る舞いを定義
「なに」を⾏うかに重点を置いて設計する
ソフトウェア志向の協調設計との親和性が⾼い
23
プロセッサ
通信バス
FPGA
func2
main
func1
int_t main () {
a = func1(xxx);
b = a + func2(yyy);
}
int func1(int x) {
…
return val;
}
int func2(int x) {
int a[N];
int i;
for(i=0;i<N;i++){
a[i] = ・・・;
:
}
}
x
func
i
a
func2](https://image.slidesharecdn.com/robosemi-20201218up-201218103816/85/FPGA-ROS-23-320.jpg)


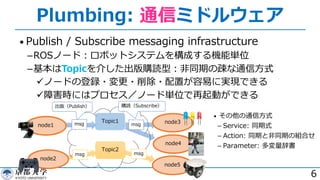
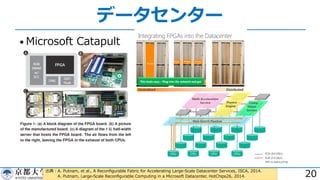
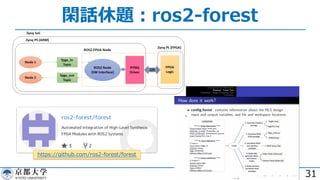
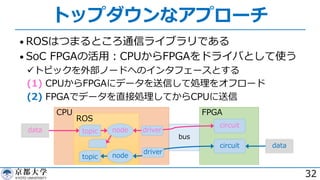
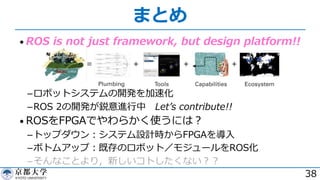
![FPGAをROSで使うには︖
• トップダウン︓
システム設計時からFPGAとROSをインテグ
• ボトムアップ︓
FPGA導⼊済みのロボット/モジュールをROS化
• チャレンジ︓
ROSノードそのものをFPGA化する
[T. Ohkawa, et al., RoSE 2019]
[Y. Ishida, et al., Advanced Robotics 2020]
ROSとFPGAを協調設計する
[D. P. Leal, et al, FPT 2020]
30
https://roscon.ros.org/2017/presentations/ROSCon
%202017%20ROS%20Compliant%20FPGA.pdf](https://image.slidesharecdn.com/robosemi-20201218up-201218103816/85/FPGA-ROS-30-320.jpg)
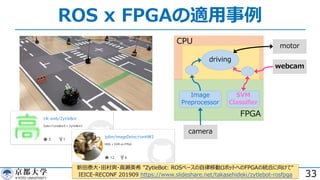










![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)













![[DL輪読会]SlowFast Networks for Video Recognition](https://cdn.slidesharecdn.com/ss_thumbnails/20191206slowfastnetworkkuboshizuma-191206010601-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2021 [TS2] 深層強化学習 〜 強化学習の基礎から応用まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2-01-210607042910-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]近年のエネルギーベースモデルの進展](https://cdn.slidesharecdn.com/ss_thumbnails/energybasedmodel-200124020855-thumbnail.jpg?width=640&height=640&fit=bounds)










































