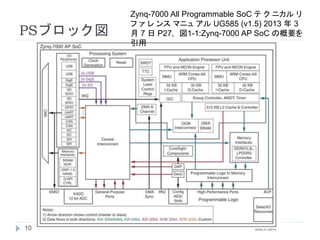
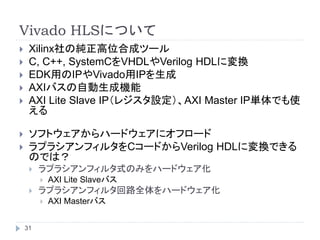
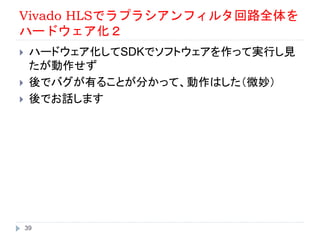
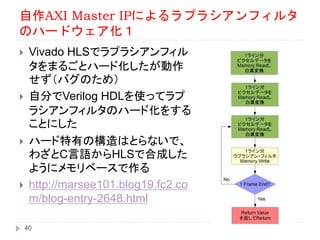
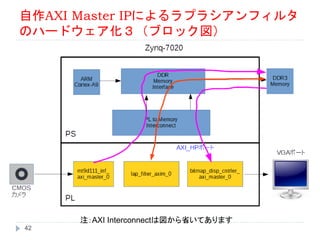
ラプラシアンフィルタをZedBoardで実装しました。デュアルARMプロセッサ+FPGAのZynqを使用しています。 ZedBoardで動作するLinux上で、ラプラシアンフィルタをソフトウェアで実装してからハードウェアにオフロードしました。




















![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Wavenet a generative model for raw audio](https://cdn.slidesharecdn.com/ss_thumbnails/wavenetagenerativemodelforrawaudio-160920054055-thumbnail.jpg?width=640&height=640&fit=bounds)

































![[DL Hacks]FPGA入門](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacksfpgabeginner-180627050145-thumbnail.jpg?width=640&height=640&fit=bounds)



















