Downloaded 22 times
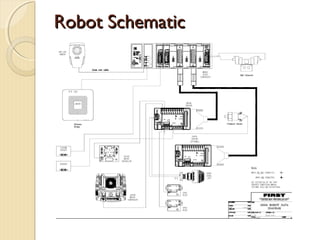
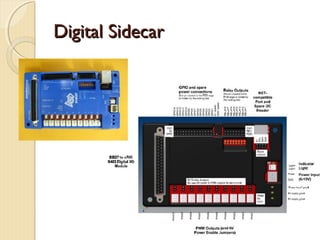

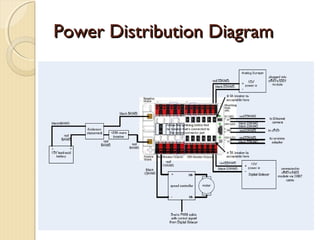
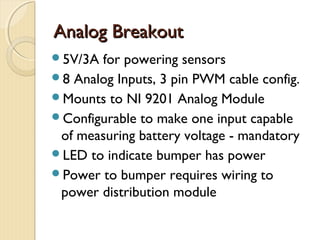

This document provides an overview of the electronics components used for a robotics competition, including: 1) The control system is centered around a National Instruments cRIO controller with I/O modules. Rookie teams will receive a smaller 4-slot cRIO compared to veterans' 8-slot models. 2) Other key components are a digital sidecar for PWM/DIO outputs, a power distribution module, analog and pneumatics breakouts, and motor controllers. 3) The operator interface consists of a netbook running control software connected via wireless to the cRIO, along with joysticks and a programmable I/O expansion device to monitor switches/buttons.




































![PPT On IOT BasedAutomatic Bumper [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/pptoniotbasedautomaticbumperautosaved-240315163352-7fb59c2d-thumbnail.jpg?width=640&height=640&fit=bounds)






























