Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Yoshiki Shibukawa
PPTX, PDF
31,211 views
FINAL FANTASY Record Keeperを支えたGolang
FINAL FANTASY Record Keeper用に作ったツールのGolang実装についていろいろ。
Technology
◦
Read more
60
Save
Share
Embed
Embed presentation
Download
Downloaded 44 times
1
/ 35
2
/ 35
3
/ 35
4
/ 35
5
/ 35
6
/ 35
7
/ 35
8
/ 35
9
/ 35
10
/ 35
11
/ 35
12
/ 35
13
/ 35
14
/ 35
15
/ 35
16
/ 35
17
/ 35
18
/ 35
19
/ 35
20
/ 35
21
/ 35
22
/ 35
23
/ 35
24
/ 35
25
/ 35
26
/ 35
27
/ 35
28
/ 35
29
/ 35
30
/ 35
31
/ 35
32
/ 35
33
/ 35
34
/ 35
35
/ 35
More Related Content
PDF
ドメインロジックに集中せよ 〜ドメイン駆動設計 powered by Spring
by
増田 亨
PPTX
CEDEC2019 大規模モバイルゲーム運用におけるマスタデータ管理事例
by
sairoutine
PDF
正しいものを正しく作る塾-設計コース
by
増田 亨
PPTX
Unity 2018-2019を見据えたDeNAのUnity開発のこれから [DeNA TechCon 2019]
by
DeNA
PPTX
DeNAのサーバー"コード"レスアーキテクチャ
by
Haruto Otake
PDF
CEDEC 2016 Metal と Vulkan を用いた水彩画レンダリング技法の紹介
by
Drecom Co., Ltd.
PDF
ドメイン駆動設計 基本を理解する
by
増田 亨
PDF
ドメイン駆動設計のためのオブジェクト指向入門
by
増田 亨
ドメインロジックに集中せよ 〜ドメイン駆動設計 powered by Spring
by
増田 亨
CEDEC2019 大規模モバイルゲーム運用におけるマスタデータ管理事例
by
sairoutine
正しいものを正しく作る塾-設計コース
by
増田 亨
Unity 2018-2019を見据えたDeNAのUnity開発のこれから [DeNA TechCon 2019]
by
DeNA
DeNAのサーバー"コード"レスアーキテクチャ
by
Haruto Otake
CEDEC 2016 Metal と Vulkan を用いた水彩画レンダリング技法の紹介
by
Drecom Co., Ltd.
ドメイン駆動設計 基本を理解する
by
増田 亨
ドメイン駆動設計のためのオブジェクト指向入門
by
増田 亨
What's hot
PPTX
FINAL FANTASY Record Keeperのマスターデータを支える技術
by
dena_study
PDF
DockerとPodmanの比較
by
Akihiro Suda
PPTX
DeNAの最新のマスタデータ管理システム Oyakata の全容
by
sairoutine
PDF
ドメイン駆動設計サンプルコードの徹底解説
by
増田 亨
PPTX
SPAセキュリティ入門~PHP Conference Japan 2021
by
Hiroshi Tokumaru
PPTX
Effective Modern C++ 勉強会 Item 22
by
Keisuke Fukuda
PDF
PostgreSQLアンチパターン
by
Soudai Sone
PDF
株式会社コロプラ『GKE と Cloud Spanner が躍動するドラゴンクエストウォーク』第 9 回 Google Cloud INSIDE Game...
by
Google Cloud Platform - Japan
PDF
インメモリーデータグリッドの選択肢
by
Masaki Yamakawa
PDF
C/C++プログラマのための開発ツール
by
MITSUNARI Shigeo
PDF
ドメイン駆動で開発する ラフスケッチから実装まで
by
増田 亨
PPTX
凝集度と責務
by
Toshinori Chiba
PDF
ドメイン駆動設計とは何か 【入門編】
by
増田 亨
PDF
Building the Game Server both API and Realtime via c#
by
Yoshifumi Kawai
PDF
PHPからgoへの移行で分かったこと
by
gree_tech
PDF
Kubernetes 疲れに Azure Container Apps はいかがでしょうか?(江東区合同ライトニングトーク 発表資料)
by
NTT DATA Technology & Innovation
PDF
Oss貢献超入門
by
Michihito Shigemura
PDF
OCIランタイムの筆頭「runc」を俯瞰する
by
Kohei Tokunaga
PDF
ユーザーストーリーの分割
by
Arata Fujimura
PDF
ゲームの仕様書を書こう4 仕様書作成で楽をするconfluenceの活用
by
Sugimoto Chizuru
FINAL FANTASY Record Keeperのマスターデータを支える技術
by
dena_study
DockerとPodmanの比較
by
Akihiro Suda
DeNAの最新のマスタデータ管理システム Oyakata の全容
by
sairoutine
ドメイン駆動設計サンプルコードの徹底解説
by
増田 亨
SPAセキュリティ入門~PHP Conference Japan 2021
by
Hiroshi Tokumaru
Effective Modern C++ 勉強会 Item 22
by
Keisuke Fukuda
PostgreSQLアンチパターン
by
Soudai Sone
株式会社コロプラ『GKE と Cloud Spanner が躍動するドラゴンクエストウォーク』第 9 回 Google Cloud INSIDE Game...
by
Google Cloud Platform - Japan
インメモリーデータグリッドの選択肢
by
Masaki Yamakawa
C/C++プログラマのための開発ツール
by
MITSUNARI Shigeo
ドメイン駆動で開発する ラフスケッチから実装まで
by
増田 亨
凝集度と責務
by
Toshinori Chiba
ドメイン駆動設計とは何か 【入門編】
by
増田 亨
Building the Game Server both API and Realtime via c#
by
Yoshifumi Kawai
PHPからgoへの移行で分かったこと
by
gree_tech
Kubernetes 疲れに Azure Container Apps はいかがでしょうか?(江東区合同ライトニングトーク 発表資料)
by
NTT DATA Technology & Innovation
Oss貢献超入門
by
Michihito Shigemura
OCIランタイムの筆頭「runc」を俯瞰する
by
Kohei Tokunaga
ユーザーストーリーの分割
by
Arata Fujimura
ゲームの仕様書を書こう4 仕様書作成で楽をするconfluenceの活用
by
Sugimoto Chizuru
Viewers also liked
PPTX
【初心者向け】Go言語勉強会資料
by
Yuji Otani
PDF
Goroutineとchannelから始めるgo言語@初心者向けgolang勉強会
by
Takuya Ueda
PDF
GopherFest 2017 - Adding Context to NATS
by
wallyqs
PPTX
Go言語のフレームワークRevelの紹介とサービスにおける活用事例
by
Yuji Otani
PPTX
Golang
by
Michael Blake
PPT
Introduction to Go programming
by
Exotel
PDF
FPGAを用いたシリアル入力型VGA映像出力装置の設計と実装
by
Yusei Yamanaka
PDF
Database sql
by
明 高橋
PDF
猫にはわからないGit講座
by
Yusei Yamanaka
PDF
GoによるWebアプリ開発のキホン
by
Akihiko Horiuchi
PDF
Go入門
by
Takuya Ueda
PDF
LINE Ads PlatformのCTRを2倍にした開発手法
by
LINE Corporation
【初心者向け】Go言語勉強会資料
by
Yuji Otani
Goroutineとchannelから始めるgo言語@初心者向けgolang勉強会
by
Takuya Ueda
GopherFest 2017 - Adding Context to NATS
by
wallyqs
Go言語のフレームワークRevelの紹介とサービスにおける活用事例
by
Yuji Otani
Golang
by
Michael Blake
Introduction to Go programming
by
Exotel
FPGAを用いたシリアル入力型VGA映像出力装置の設計と実装
by
Yusei Yamanaka
Database sql
by
明 高橋
猫にはわからないGit講座
by
Yusei Yamanaka
GoによるWebアプリ開発のキホン
by
Akihiko Horiuchi
Go入門
by
Takuya Ueda
LINE Ads PlatformのCTRを2倍にした開発手法
by
LINE Corporation
Similar to FINAL FANTASY Record Keeperを支えたGolang
PPTX
レガシーな Perl システムに DDD (ドメイン駆動設計)を取り入れる
by
sairoutine
PDF
GCをみればRTSが見えてくる、かも。。。
by
dec9ue
KEY
How wonderful to be (statically) typed 〜型が付くってスバラシイ〜
by
Hiromi Ishii
PDF
Tokyo.R#16 wdkz
by
Kazuya Wada
PDF
Clojure
by
Uehara Junji
PDF
Unity開発で週イチ呑み会を支える技術
by
kazuya noshiro
PDF
言語アップデート -Scala編-
by
Kota Mizushima
PDF
(工事中) Git の仕組み
by
Teloo
PDF
(工事中) Git の仕組み
by
Teloo
KEY
Yesodを支える技術
by
Hiromi Ishii
PDF
イマドキの現場で使えるJavaライブラリ事情
by
takezoe
PDF
RのffでGLMしてみたけど...
by
Kazuya Wada
PDF
世界最速の正規表現JITエンジンの実装
by
Ryoma Sin'ya
PDF
[CEDEC2014]モバイルゲームにおける社内基盤開発と“実録”
by
Drecom Co., Ltd.
PDF
DeNA の新しいネイティブ開発(パズル戦隊デナレンジャー)
by
dena_study
PDF
Scalaプログラミング・マニアックス
by
Tomoharu ASAMI
PDF
CIBC workshop by imagire
by
Takashi Imagire
PDF
ドリコムJenkins勉強会資料
by
Go Sueyoshi (a.k.a sue445)
PPTX
AndApp開発における全て #denatechcon
by
DeNA
PDF
萩野服部研究室 スキー合宿 2012 自己紹介(酒井)
by
Masahiro Sakai
レガシーな Perl システムに DDD (ドメイン駆動設計)を取り入れる
by
sairoutine
GCをみればRTSが見えてくる、かも。。。
by
dec9ue
How wonderful to be (statically) typed 〜型が付くってスバラシイ〜
by
Hiromi Ishii
Tokyo.R#16 wdkz
by
Kazuya Wada
Clojure
by
Uehara Junji
Unity開発で週イチ呑み会を支える技術
by
kazuya noshiro
言語アップデート -Scala編-
by
Kota Mizushima
(工事中) Git の仕組み
by
Teloo
(工事中) Git の仕組み
by
Teloo
Yesodを支える技術
by
Hiromi Ishii
イマドキの現場で使えるJavaライブラリ事情
by
takezoe
RのffでGLMしてみたけど...
by
Kazuya Wada
世界最速の正規表現JITエンジンの実装
by
Ryoma Sin'ya
[CEDEC2014]モバイルゲームにおける社内基盤開発と“実録”
by
Drecom Co., Ltd.
DeNA の新しいネイティブ開発(パズル戦隊デナレンジャー)
by
dena_study
Scalaプログラミング・マニアックス
by
Tomoharu ASAMI
CIBC workshop by imagire
by
Takashi Imagire
ドリコムJenkins勉強会資料
by
Go Sueyoshi (a.k.a sue445)
AndApp開発における全て #denatechcon
by
DeNA
萩野服部研究室 スキー合宿 2012 自己紹介(酒井)
by
Masahiro Sakai
More from Yoshiki Shibukawa
PPTX
JavaScript/TypeScript実力強化書 2章のアップデート Forkwell Library
by
Yoshiki Shibukawa
PDF
技育祭2025秋 サボろうとする生成AIの傾向と対策 登壇資料(フューチャー渋川)
by
Yoshiki Shibukawa
PPTX
Kiroを使ってみた - そこから見える今どきの開発 - Kiro Meetup Japan #1
by
Yoshiki Shibukawa
PDF
多すぎるユニットテストは却ってよくない?私が実践しているテストコードのリファクタリング
by
Yoshiki Shibukawa
PDF
ITコンサルが改善するのはビジネスだけじゃない! サークル的活動で業界貢献 技育祭2024秋
by
Yoshiki Shibukawa
PPTX
技術書執筆のススメ 〜Only1なエンジニアになるためのセルフブランディング〜の発表資料
by
Yoshiki Shibukawa
PPTX
GO本執筆者が語る、2064年もITで仕事し続けるためのキャリアプランの発表資料
by
Yoshiki Shibukawa
PPTX
Golang tokyo #7 qtpm
by
Yoshiki Shibukawa
PPTX
Chunked encoding を使った高速化の考察
by
Yoshiki Shibukawa
PPTX
Mithril
by
Yoshiki Shibukawa
PPTX
Go & multi platform GUI Trials and Errors
by
Yoshiki Shibukawa
PPTX
Excelの話
by
Yoshiki Shibukawa
PPTX
アンラーニング
by
Yoshiki Shibukawa
PDF
東京Node学園 今できる通信高速化にトライしてみた
by
Yoshiki Shibukawa
PDF
Oktavia全文検索エンジン - SphinxCon JP 2014
by
Yoshiki Shibukawa
PDF
Oktavia Search Engine - pyconjp2014
by
Yoshiki Shibukawa
PDF
大規模JavaScript開発
by
Yoshiki Shibukawa
PDF
Xpjug基調lt2011
by
Yoshiki Shibukawa
PDF
Expert JavaScript Programming
by
Yoshiki Shibukawa
PDF
JavaScriptゲーム制作勉強会
by
Yoshiki Shibukawa
JavaScript/TypeScript実力強化書 2章のアップデート Forkwell Library
by
Yoshiki Shibukawa
技育祭2025秋 サボろうとする生成AIの傾向と対策 登壇資料(フューチャー渋川)
by
Yoshiki Shibukawa
Kiroを使ってみた - そこから見える今どきの開発 - Kiro Meetup Japan #1
by
Yoshiki Shibukawa
多すぎるユニットテストは却ってよくない?私が実践しているテストコードのリファクタリング
by
Yoshiki Shibukawa
ITコンサルが改善するのはビジネスだけじゃない! サークル的活動で業界貢献 技育祭2024秋
by
Yoshiki Shibukawa
技術書執筆のススメ 〜Only1なエンジニアになるためのセルフブランディング〜の発表資料
by
Yoshiki Shibukawa
GO本執筆者が語る、2064年もITで仕事し続けるためのキャリアプランの発表資料
by
Yoshiki Shibukawa
Golang tokyo #7 qtpm
by
Yoshiki Shibukawa
Chunked encoding を使った高速化の考察
by
Yoshiki Shibukawa
Mithril
by
Yoshiki Shibukawa
Go & multi platform GUI Trials and Errors
by
Yoshiki Shibukawa
Excelの話
by
Yoshiki Shibukawa
アンラーニング
by
Yoshiki Shibukawa
東京Node学園 今できる通信高速化にトライしてみた
by
Yoshiki Shibukawa
Oktavia全文検索エンジン - SphinxCon JP 2014
by
Yoshiki Shibukawa
Oktavia Search Engine - pyconjp2014
by
Yoshiki Shibukawa
大規模JavaScript開発
by
Yoshiki Shibukawa
Xpjug基調lt2011
by
Yoshiki Shibukawa
Expert JavaScript Programming
by
Yoshiki Shibukawa
JavaScriptゲーム制作勉強会
by
Yoshiki Shibukawa
FINAL FANTASY Record Keeperを支えたGolang
1.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. GoCon 2015 Winter FINAL FANTASY Record Keeperを支えた Golang 2015/12/06 GDI 渋川よしき
2.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. お前だれよ? 前職 ⁃ 自動車会社の社内SE 現職 ⁃ 社内ゲームエンジン用のフレームワーク (クライアント用もサーバ用も)作ったり、 開発支援ツール作ったりいわゆる社内SE ⁃ たまにゲーム開発を手伝ったりもします。 渋川 よしき プログラミング C++とかPythonとかGolangとかJavaScriptとか 本 つまみぐい勉強法、アート・オブ・コミュニティ(翻訳)、 Mobageを支える技術、オブジェクト指向JavaScript(翻訳)、 ポモドーロ・テクニック入門(翻訳)、etc
3.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. ©SQUARE ENIX CO., LTD. ©DeNA Co., Ltd.
4.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. 前回までのあらすじ
5.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. FFRKマスターデータ運用改善 http://www.slideshare.net/dena_study/final-fantasy-record-keeper
6.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. まとめ: どういうところで使ったか? ゲームのマスターデータ ⁃ マスターデータというのはプログラムでも絵でも音でもない要素 ⁃ キャラクタや敵や技のパラメータ、ダンジョンの難易度、 シナリオの文言、チュートリアル設計etc ⁃ 3Dの世界になると、レベルデザイナーなどさらに分業化している が、DeNAでは3つの役割に分担している • エンジニア: プログラム • アーティスト: 絵とかアニメーションとかUIデザイン • プランナー: マスターデータ Google Drive上にあるスプレッドシートに入ったマスターデータの元 データからゲームサーバが使えるフォーマットに変換するツールを Golangで書いたら、Google Apps Scriptよりも100倍早くなったよ 今日は実装部分の話をします
7.
Copyright (C) DeNA
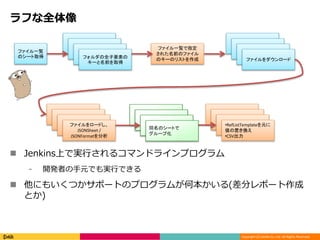
Co.,Ltd. All Rights Reserved. ラフな全体像 ファイル一覧 のシート取得 ファイル一覧で指定 された名前のファイル のキーのリストを作成フォルダの全子要素の キーと名前を取得 ファイルをダウンロード ファイルをロードし、 JSONSheet / JSONFormatを分析 •RefListTemplateを元に 値の置き換え •CSV出力 Jenkins上で実行されるコマンドラインプログラム ⁃ 開発者の手元でも実行できる 他にもいくつかサポートのプログラムが何本かいる(差分レポート作成 とか) 同名のシートで グループ化
8.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. 今日のレシピ 使っている開発環境・ライブラリ 並列処理の実装と並列処理のログ出力 Google APIのアクセス頻度を制御する diff(文字単位、行単位、blameの実装) xlsxファイルの読み込みと高速化
9.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. 使っている開発環境・ライブラリ
10.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. 使っている環境・ライブラリ IntelliJ IDEA + golang-idea-plugin ⁃ https://github.com/go-lang-plugin-org/go-lang-idea-plugin ⁃ VimはなるべくデフォルトにしておきたいのでIDE ⁃ pluginはどんどん改善されたりしている(が不安定な部分も) ⁃ 英語のスペルチェッカーが地味便利 Sphinx ⁃ ドキュメントツール (http://sphinx-users.jp) ⁃ 使い方を説明する4択クイズも作れる!(作った) github.com/jessevdk/go-flags (MIT) ⁃ コマンドライン引数のパース ⁃ short/long、同じ引数を複数回指定、きれいなヘルプテキスト出力 あたりが良かった ⁃ 構造体のタグで指定する • 多言語化しにくいという欠点があるので言語ごとに構造体を作って切り替 えという苦肉の策
11.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved.
12.
Copyright (C) DeNA
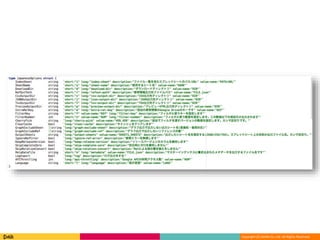
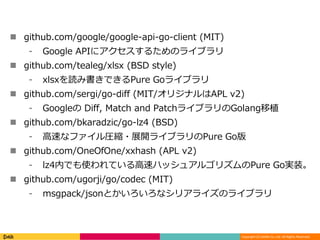
Co.,Ltd. All Rights Reserved. github.com/google/google-api-go-client (MIT) ⁃ Google APIにアクセスするためのライブラリ github.com/tealeg/xlsx (BSD style) ⁃ xlsxを読み書きできるPure Goライブラリ github.com/sergi/go-diff (MIT/オリジナルはAPL v2) ⁃ Googleの Diff, Match and PatchライブラリのGolang移植 github.com/bkaradzic/go-lz4 (BSD) ⁃ 高速なファイル圧縮・展開ライブラリのPure Go版 github.com/OneOfOne/xxhash (APL v2) ⁃ lz4内でも使われている高速ハッシュアルゴリズムのPure Go実装。 github.com/ugorji/go/codec (MIT) ⁃ msgpack/jsonとかいろいろなシリアライズのライブラリ
13.
Copyright (C) DeNA
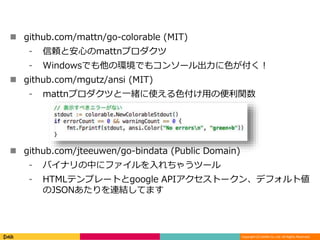
Co.,Ltd. All Rights Reserved. github.com/mattn/go-colorable (MIT) ⁃ 信頼と安心のmattnプロダクツ ⁃ Windowsでも他の環境でもコンソール出力に色が付く! github.com/mgutz/ansi (MIT) ⁃ mattnプロダクツと一緒に使える色付け用の便利関数 github.com/jteeuwen/go-bindata (Public Domain) ⁃ バイナリの中にファイルを入れちゃうツール ⁃ HTMLテンプレートとgoogle APIアクセストークン、デフォルト値 のJSONあたりを連結してます
14.
Copyright (C) DeNA
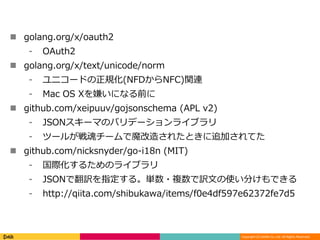
Co.,Ltd. All Rights Reserved. golang.org/x/oauth2 ⁃ OAuth2 golang.org/x/text/unicode/norm ⁃ ユニコードの正規化(NFDからNFC)関連 ⁃ Mac OS Xを嫌いになる前に github.com/xeipuuv/gojsonschema (APL v2) ⁃ JSONスキーマのバリデーションライブラリ ⁃ ツールが戦魂チームで魔改造されたときに追加されてた github.com/nicksnyder/go-i18n (MIT) ⁃ 国際化するためのライブラリ ⁃ JSONで翻訳を指定する。単数・複数で訳文の使い分けもできる ⁃ http://qiita.com/shibukawa/items/f0e4df597e62372fe7d5
15.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. 並列処理の実装とログ出力
16.
Copyright (C) DeNA
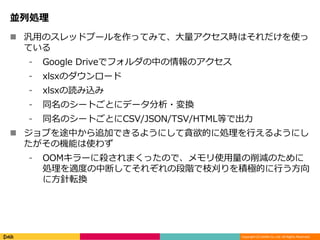
Co.,Ltd. All Rights Reserved. 並列処理 汎用のスレッドプールを作ってみて、大量アクセス時はそれだけを使っ ている ⁃ Google Driveでフォルダの中の情報のアクセス ⁃ xlsxのダウンロード ⁃ xlsxの読み込み ⁃ 同名のシートごとにデータ分析・変換 ⁃ 同名のシートごとにCSV/JSON/TSV/HTML等で出力 ジョブを途中から追加できるようにして貪欲的に処理を行えるようにし たがその機能は使わず ⁃ OOMキラーに殺されまくったので、メモリ使用量の削減のために 処理を適度の中断してそれぞれの段階で枝刈りを積極的に行う方向 に方針転換
17.
Copyright (C) DeNA
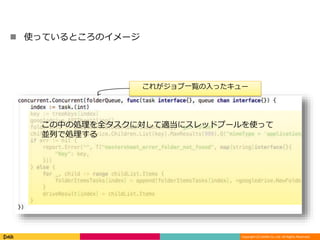
Co.,Ltd. All Rights Reserved. 使っているところのイメージ この中の処理を全タスクに対して適当にスレッドプールを使って 並列で処理する これがジョブ一覧の入ったキュー
18.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved.
19.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved.
20.
Copyright (C) DeNA
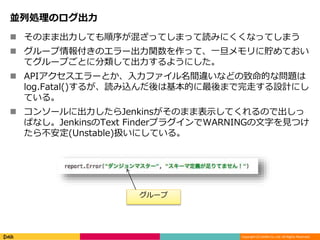
Co.,Ltd. All Rights Reserved. 並列処理のログ出力 そのまま出力しても順序が混ざってしまって読みにくくなってしまう グループ情報付きのエラー出力関数を作って、一旦メモリに貯めておい てグループごとに分類して出力するようにした。 APIアクセスエラーとか、入力ファイル名間違いなどの致命的な問題は log.Fatal()するが、読み込んだ後は基本的に最後まで完走する設計にし ている。 コンソールに出力したらJenkinsがそのまま表示してくれるので出しっ ぱなし。JenkinsのText FinderプラグインでWARNINGの文字を見つけ たら不安定(Unstable)扱いにしている。 グループ
21.
Copyright (C) DeNA
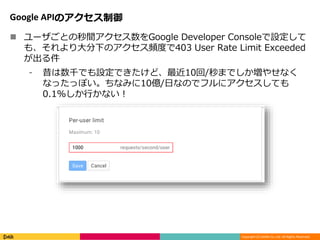
Co.,Ltd. All Rights Reserved. Google APIのアクセス制御 ユーザごとの秒間アクセス数をGoogle Developer Consoleで設定して も、それより大分下のアクセス頻度で403 User Rate Limit Exceeded が出る件 ⁃ 昔は数千でも設定できたけど、最近10回/秒までしか増やせなく なったっぽい。ちなみに10億/日なのでフルにアクセスしても 0.1%しか行かない!
22.
Copyright (C) DeNA
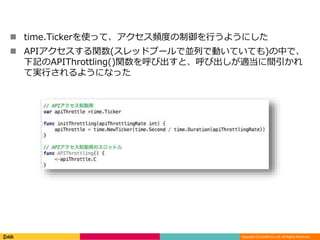
Co.,Ltd. All Rights Reserved. time.Tickerを使って、アクセス頻度の制御を行うようにした APIアクセスする関数(スレッドプールで並列で動いていても)の中で、 下記のAPIThrottling()関数を呼び出すと、呼び出しが適当に間引かれ て実行されるようになった
23.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. diffの実装(文字単位/blameの実装)
24.
Copyright (C) DeNA
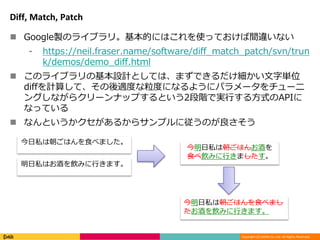
Co.,Ltd. All Rights Reserved. Diff, Match, Patch Google製のライブラリ。基本的にはこれを使っておけば間違いない ⁃ https://neil.fraser.name/software/diff_match_patch/svn/trun k/demos/demo_diff.html このライブラリの基本設計としては、まずできるだけ細かい文字単位 diffを計算して、その後適度な粒度になるようにパラメータをチューニ ングしながらクリーンナップするという2段階で実行する方式のAPIに なっている なんというかクセがあるからサンプルに従うのが良さそう 今日私は朝ごはんを食べました。 明日私はお酒を飲みに行きます。 今明日私は朝ごはんお酒を 食べ飲みに行きましたす。 今明日私は朝ごはんを食べまし たお酒を飲みに行きます。
25.
Copyright (C) DeNA
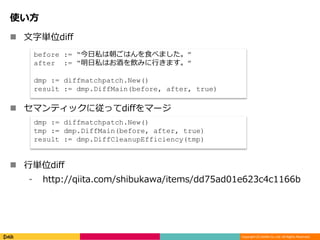
Co.,Ltd. All Rights Reserved. 使い方 文字単位diff セマンティックに従ってdiffをマージ 行単位diff ⁃ http://qiita.com/shibukawa/items/dd75ad01e623c4c1166b before := “今日私は朝ごはんを食べました。” after := “明日私はお酒を飲みに行きます。” dmp := diffmatchpatch.New() result := dmp.DiffMain(before, after, true) dmp := diffmatchpatch.New() tmp := dmp.DiffMain(before, after, true) result := dmp.DiffCleanupEfficiency(tmp)
26.
Copyright (C) DeNA
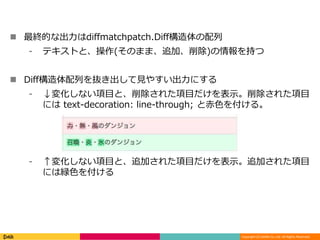
Co.,Ltd. All Rights Reserved. 最終的な出力はdiffmatchpatch.Diff構造体の配列 ⁃ テキストと、操作(そのまま、追加、削除)の情報を持つ Diff構造体配列を抜き出して見やすい出力にする ⁃ ↓変化しない項目と、削除された項目だけを表示。削除された項目 には text-decoration: line-through; と赤色を付ける。 ⁃ ↑変化しない項目と、追加された項目だけを表示。追加された項目 には緑色を付ける
27.
Copyright (C) DeNA
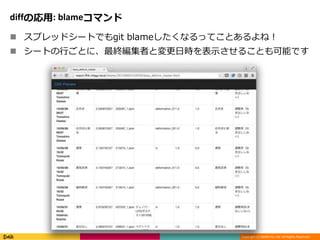
Co.,Ltd. All Rights Reserved. diffの応用: blameコマンド スプレッドシートでもgit blameしたくなるってことあるよね! シートの行ごとに、最終編集者と変更日時を表示させることも可能です
28.
Copyright (C) DeNA
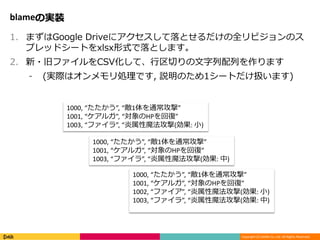
Co.,Ltd. All Rights Reserved. blameの実装 1. まずはGoogle Driveにアクセスして落とせるだけの全リビジョンのス プレッドシートをxlsx形式で落とします。 2. 新・旧ファイルをCSV化して、行区切りの文字列配列を作ります ⁃ (実際はオンメモリ処理です, 説明のため1シートだけ扱います) 1000, “たたかう”, “敵1体を通常攻撃” 1001, “ケアルガ”, “対象のHPを回復” 1003, “ファイラ”, “炎属性魔法攻撃(効果: 小) 1000, “たたかう”, “敵1体を通常攻撃” 1001, “ケアルガ”, “対象のHPを回復” 1003, “ファイラ”, “炎属性魔法攻撃(効果: 中) 1000, “たたかう”, “敵1体を通常攻撃” 1001, “ケアルガ”, “対象のHPを回復” 1002, “ファイア”, “炎属性魔法攻撃(効果: 小) 1003, “ファイラ”, “炎属性魔法攻撃(効果: 中)
29.
Copyright (C) DeNA
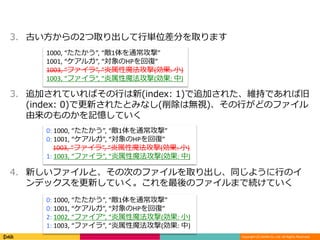
Co.,Ltd. All Rights Reserved. 3. 古い方からの2つ取り出して行単位差分を取ります 3. 追加されていればその行は新(index: 1)で追加された、維持であれば旧 (index: 0)で更新されたとみなし(削除は無視)、その行がどのファイル 由来のものかを記憶していく 4. 新しいファイルと、その次のファイルを取り出し、同じように行のイ ンデックスを更新していく。これを最後のファイルまで続けていく 1000, “たたかう”, “敵1体を通常攻撃” 1001, “ケアルガ”, “対象のHPを回復” 1003, “ファイラ”, “炎属性魔法攻撃(効果: 小) 1003, “ファイラ”, “炎属性魔法攻撃(効果: 中) 0: 1000, “たたかう”, “敵1体を通常攻撃” 0: 1001, “ケアルガ”, “対象のHPを回復” 1003, “ファイラ”, “炎属性魔法攻撃(効果: 小) 1: 1003, “ファイラ”, “炎属性魔法攻撃(効果: 中) 0: 1000, “たたかう”, “敵1体を通常攻撃” 0: 1001, “ケアルガ”, “対象のHPを回復” 2: 1002, “ファイア”, “炎属性魔法攻撃(効果: 小) 1: 1003, “ファイラ”, “炎属性魔法攻撃(効果: 中)
30.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. xlsxの読み込みと高速化
31.
Copyright (C) DeNA
Co.,Ltd. All Rights Reserved. xlsxのロード github.com/tealeg/xlsxがオンリーワンの選択肢。これでOK? ⁃ ではなかった。 • ポインタで持つべき所を実体で大量に持ってメモリを食っていたり、構造 体のメンバーが初期化されてないところがあったり、先頭の空行が勝手に 省略されて行がずれてたり、生成されたxlsxファイルがExcelで読み込めな かったり・・・ ⁃ バグ修正のPull Requestを送り、ついでにセルのタイプ(数値型や Boolean型など)を取得できるように機能拡張もした。 ⁃ 今もたくさんユーザがいて、スタイルなども扱えるように修正され 続けているし、基本的に良いライブラリです ⁃ xlsxのライブラリで困ったらPythonのopenpyxlを参照すると良い です。MS製のXMLスキーマを使ったユニットテストもしていて、 困ったときのリファレンス実装として役立ちます。
32.
Copyright (C) DeNA
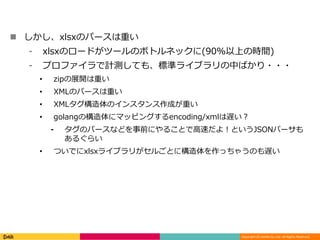
Co.,Ltd. All Rights Reserved. しかし、xlsxのパースは重い ⁃ xlsxのロードがツールのボトルネックに(90%以上の時間) ⁃ プロファイラで計測しても、標準ライブラリの中ばかり・・・ • zipの展開は重い • XMLのパースは重い • XMLタグ構造体のインスタンス作成が重い • golangの構造体にマッピングするencoding/xmlは遅い? ⁃ タグのパースなどを事前にやることで高速だよ!というJSONパーサも あるぐらい • ついでにxlsxライブラリがセルごとに構造体を作っちゃうのも遅い
33.
Copyright (C) DeNA
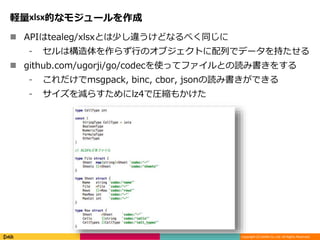
Co.,Ltd. All Rights Reserved. 軽量xlsx的なモジュールを作成 APIはtealeg/xlsxとは少し違うけどなるべく同じに ⁃ セルは構造体を作らず行のオブジェクトに配列でデータを持たせる github.com/ugorji/go/codecを使ってファイルとの読み書きをする ⁃ これだけでmsgpack, binc, cbor, jsonの読み書きができる ⁃ サイズを減らすためにlz4で圧縮もかけた
34.
Copyright (C) DeNA
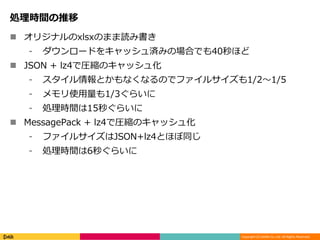
Co.,Ltd. All Rights Reserved. 処理時間の推移 オリジナルのxlsxのまま読み書き ⁃ ダウンロードをキャッシュ済みの場合でも40秒ほど JSON + lz4で圧縮のキャッシュ化 ⁃ スタイル情報とかもなくなるのでファイルサイズも1/2〜1/5 ⁃ メモリ使用量も1/3ぐらいに ⁃ 処理時間は15秒ぐらいに MessagePack + lz4で圧縮のキャッシュ化 ⁃ ファイルサイズはJSON+lz4とほぼ同じ ⁃ 処理時間は6秒ぐらいに
35.
Copyright (C) DeNA
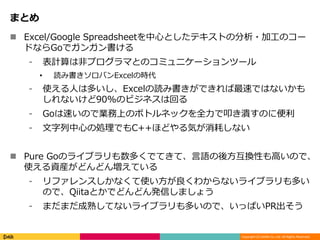
Co.,Ltd. All Rights Reserved. まとめ Excel/Google Spreadsheetを中心としたテキストの分析・加工のコー ドならGoでガンガン書ける ⁃ 表計算は非プログラマとのコミュニケーションツール • 読み書きソロバンExcelの時代 ⁃ 使える人は多いし、Excelの読み書きができれば最速ではないかも しれないけど90%のビジネスは回る ⁃ Goは速いので業務上のボトルネックを全力で叩き潰すのに便利 ⁃ 文字列中心の処理でもC++ほどやる気が消耗しない Pure Goのライブラリも数多くでてきて、言語の後方互換性も高いので、 使える資産がどんどん増えている ⁃ リファレンスしかなくて使い方が良くわからないライブラリも多い ので、Qiitaとかでどんどん発信しましょう ⁃ まだまだ成熟してないライブラリも多いので、いっぱいPR出そう
Download





![Unity 2018-2019を見据えたDeNAのUnity開発のこれから [DeNA TechCon 2019]](https://cdn.slidesharecdn.com/ss_thumbnails/techcon2019harutootake-190218063853-thumbnail.jpg?width=640&height=640&fit=bounds)
















































![[CEDEC2014]モバイルゲームにおける社内基盤開発と“実録”](https://cdn.slidesharecdn.com/ss_thumbnails/cedec201409-04-140924054142-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)