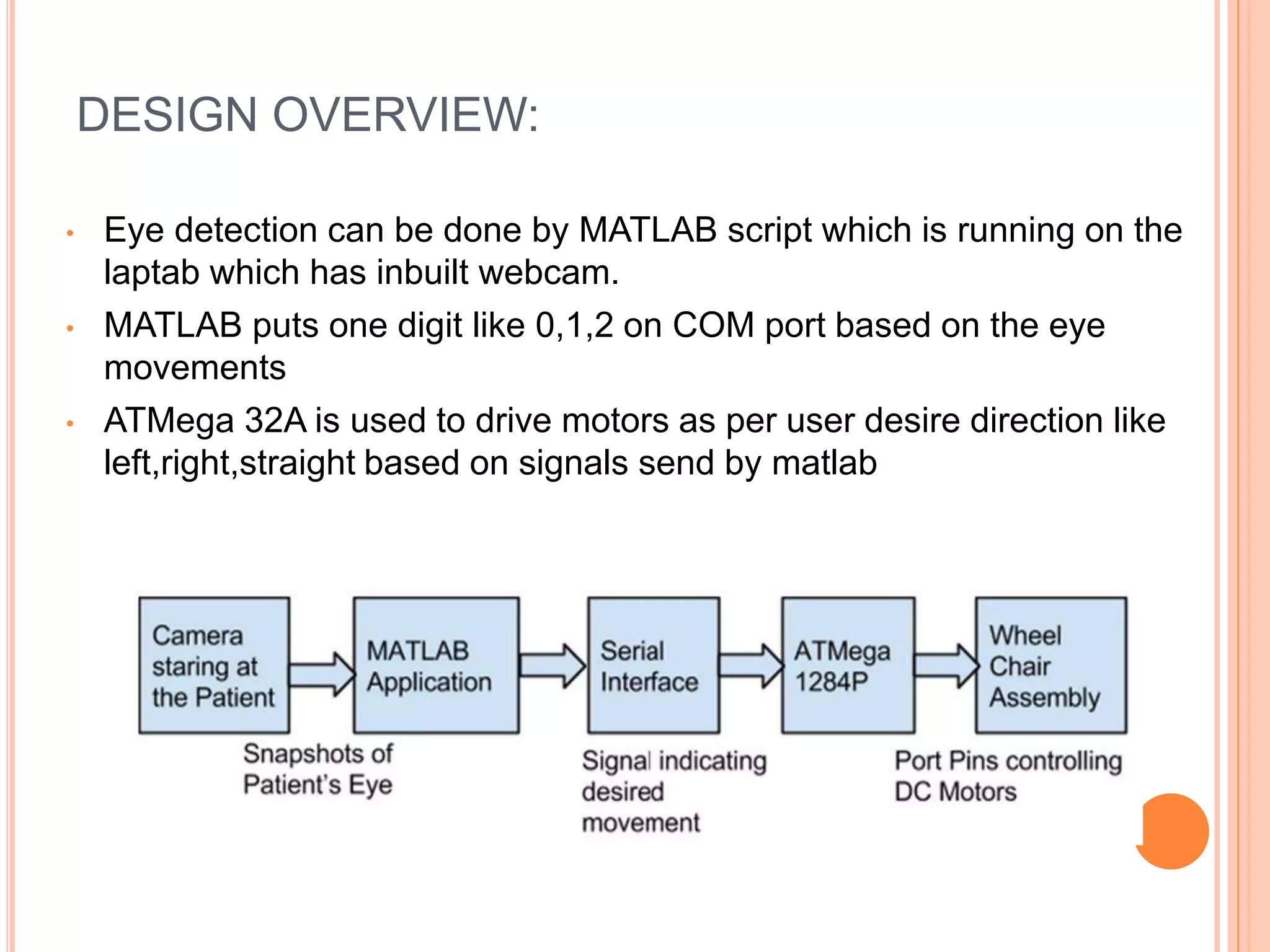
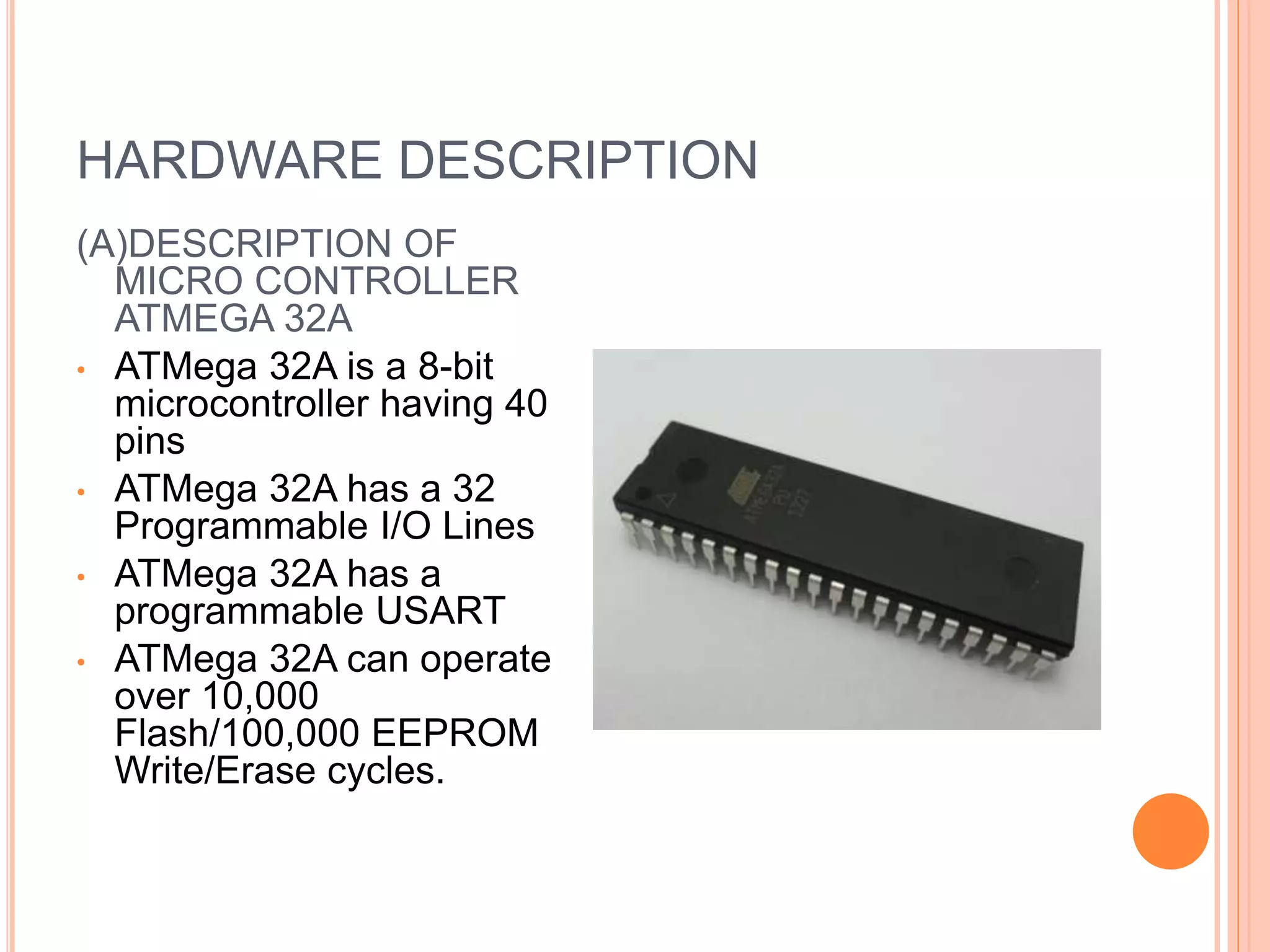
This document describes an eye monitored wheelchair controlled by head movements. A webcam is used to capture the user's eye movements which are processed using MATLAB to detect the direction of movement. MATLAB sends signals corresponding to the eye movements to a microcontroller over serial communication. The microcontroller controls DC motors through an motor driver IC to move the wheelchair in the desired direction based on the eye movement signals. The project aims to help quadriplegic people by enabling them to control a wheelchair using their ability to move their head and eyes.

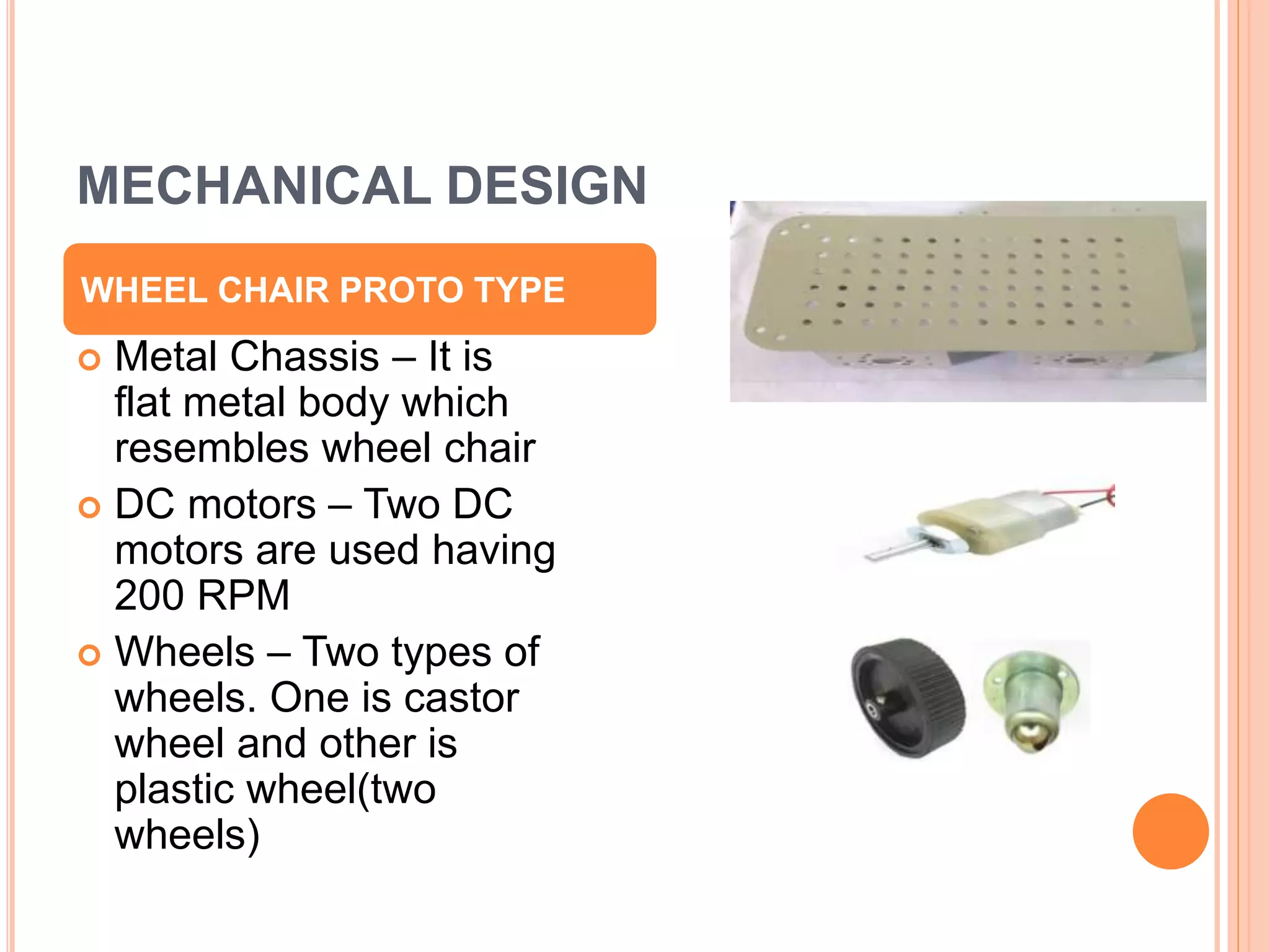































![iotoperatedwheelchair8thsem-170425052323_(1)[1] - Copy.pptx - AutoRecovered...](https://cdn.slidesharecdn.com/ss_thumbnails/iotoperatedwheelchair8thsem-17042505232311-copy-251101122002-e1587880-thumbnail.jpg?width=640&height=640&fit=bounds)
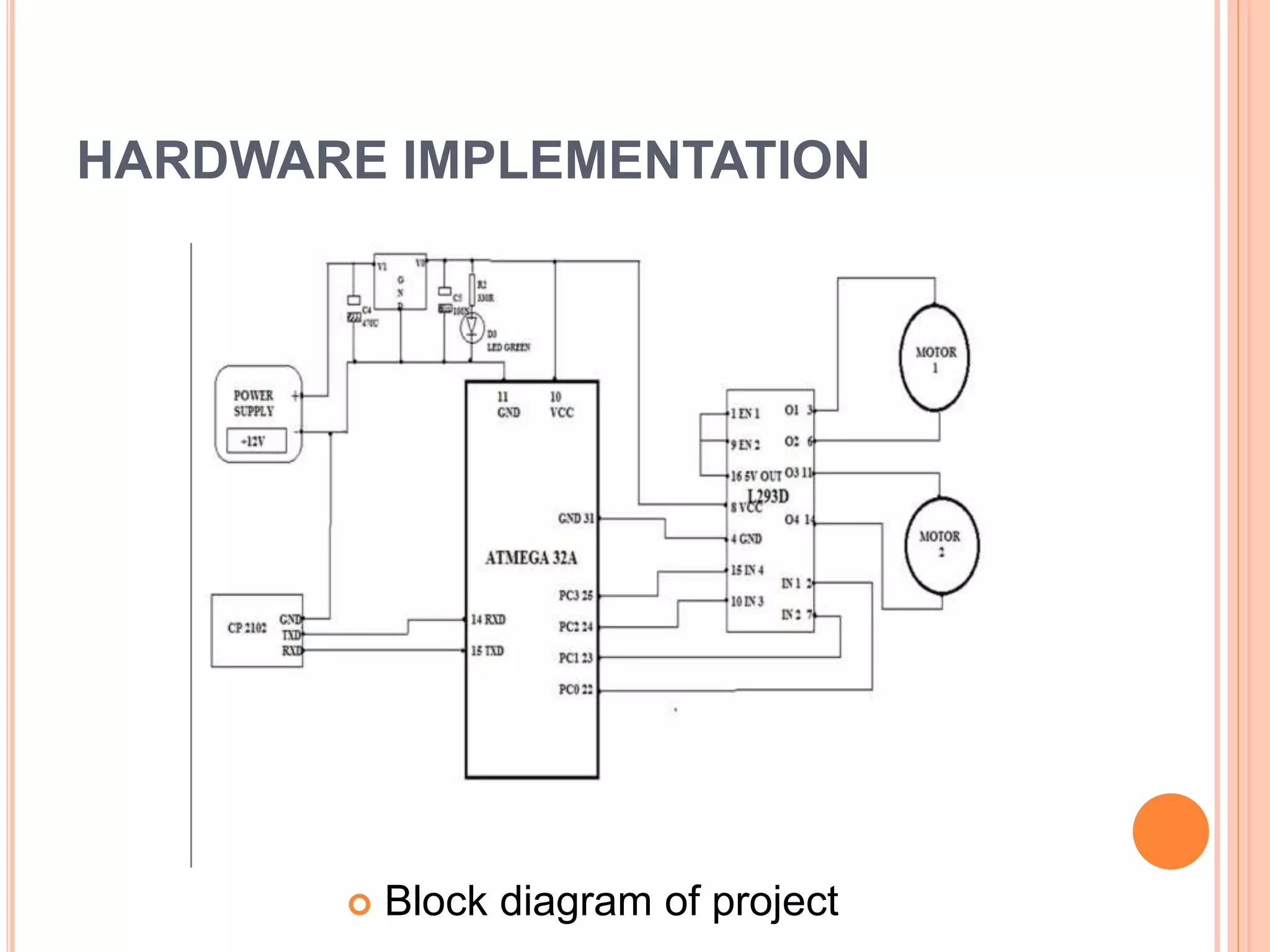
![iotoperatedwheelchair8thsem-170425052323_(1)[1] - Copy.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/iotoperatedwheelchair8thsem-17042505232311-copy-251101122238-dd3b998f-thumbnail.jpg?width=640&height=640&fit=bounds)



































