![Ergonomics-for-One in a Robotic Shopping Cart for the
Blind
Vladimir A. Kulyukin Chaitanya Gharpure
Computer Science Assistive Technology Laboratory Computer Science Assistive Technology Laboratory
Department of Computer Science Department of Computer Science
Utah State University Utah State University
vladimir.kulyukin@usu.edu cpg@cc.usu.edu
ABSTRACT homes and communities as long as possible. This situation brings
Assessment and design frameworks for human-robot teams a unique challenge and opportunity to assistive robotics: is it
attempt to maximize generality by covering a broad range of possible to develop robotic devices that will enable older and
potential applications. In this paper, we argue that, in assistive disabled individuals to maintain their independence and thereby
robotics, the other side of generality is limited applicability: it is reduce the cost of institutionalized medical care?
oftentimes more feasible to custom-design and evolve an Vision is a sensory modality that deteriorates with age. As of
application that alleviates a specific disability than to spend now, there are 11.4 million visually impaired individuals living in
resources on figuring out how to customize an existing generic the U.S. [8]. Grocery shopping is an activity that presents a
framework. We present a case study that shows how we used a barrier to independence for many visually impaired people who
pure bottom-up learn-through-deployment approach inspired by either do not go grocery shopping at all or rely on sighted guides,
the principles of ergonomics-for-one to design, deploy and e.g., friends, spouses, and partners. Traditional navigation aids,
iteratively re-design a proof-of-concept robotic shopping cart for such as guide dogs and white canes, are not adequate in such
the blind. dynamic and complex environments as modern supermarkets.
These aids cannot help their users with macro-navigation, which
Categories and Subject Descriptors requires topological knowledge of the environment. Nor can they
H.1.2 [Models and Principles]: User/Machine Systems – human assist with carrying useful payloads.
factors. In summer 2004, the Computer Science Assistive Technology
Laboratory (CSATL) of the Department of Computer Science
General Terms (CS) of Utah State University (USU) launched a project whose
Performance, Design, Experimentation, Human Factors. objective is to build a robotic shopping cart for the visually
impaired. In our previous publications, we examined several
technical aspects of robot-assisted navigation for the blind, such
Keywords as RFID-based localization, greedy free space selection, and
assistive technology, navigation and wayfinding for the blind, topological knowledge representation [6, 7]. In this paper, we
assistive robotics, ergonomics-for-one. focus on how the ergonomic aspects of the system have evolved
through fitting trials in two dynamic and complex environments.
1. INTRODUCTION The paper is organized as follows. In Section 2, we review
Current demographic trends in the U.S. signify a demographic
relevant research on human-robot interaction (HRI). In Section 3,
shift from a population where most people are relatively young to
we discuss the basic principles of ergonomics-for-one and present
a population where most people are relatively old. In 2000, U.S.
an ergonomics-for-one analysis to identify the key elements of the
residents aged 65 and older constituted approximately 12 percent
performance gap between the blind individual and the task of
of the population. It is projected that by 2030 people aged 65 and
independent grocery shopping. In Section 4, we present our initial
older will make up 22 percent of the U.S. population [11]. In
design aimed at bridging several elements of the performance gap.
essence, older adults will make up an increasingly larger percent
In Section 5, we present our navigation trials with a small sample
of the population.
of visually impaired participants. We describe our experiment
The primary concern for aging adults is the decline in their design, analyze the collected data, and present the participants'
sensory-motor abilities. Surveys show that a great number of U.S. feedback. In Section 6, we return to bridging the performance
residents would like to maintain their independent status in their gap. We describe how we deployed the robotic shopping cart in a
supermarket and discuss what ergonomic modifications we made
in the system after several fitting trials in that environment. In
Permission to make digital or hard copies of all or part of this work for Section 7, we focus on two major challenges for the future. In
personal or classroom use is granted without fee provided that copies are Section 8, we give our conclusions.
not made or distributed for profit or commercial advantage and that
copies bear this notice and the full citation on the first page. To copy
otherwise, or republish, to post on servers or to redistribute to lists, 2. RELATED WORK
requires prior specific permission and/or a fee. In recent years, many researchers have asked the question of what
HRI’04, March 2–3, 2006, Salt Lake City, Utah, USA. it means to design a human-robot team and to measure its
Copyright 2006 ACM 1-58113-000-0/00/0004…$5.00.](https://image.slidesharecdn.com/hri2006ergo-111228185559-phpapp01/75/Ergonomics-for-One-in-a-Robotic-Shopping-Cart-for-the-Blind-1-2048.jpg)
![performance from the standpoint of human-robot interaction 3. ERGONOMICS-FOR-ONE
(HRI). Fong et al. [1] identify common metrics for task-oriented We discovered the field of ergonomics-for-one during a literature
HRI through a thorough analysis of existing HRI applications. search for conceptual frameworks to help guide the design of the
Several task-specific metrics are proposed and suggested for robotic shopping cart for the blind and assess its performance with
standardization. It is claimed that the metrics are applicable at any human participants. The term ergonomics-for-one was first coined
point of the HRI spectrum starting at pure teleoperation and by McQuistion in 1993 [9]. In brief, ergonomics-for-one is the
ending with full autonomy. Howard [5] proposes a systematic science of fitting the task to a particular individual who wants to
approach for assessing performance of a human-robot team. The repeatedly accomplish the task in a given environment.
approach takes into account the capabilities of both human and
robotic agents and integrates the effect of cognitive stress during Although the use of the term is recent, the ideas underlying it are
continuous operation. Goodrich and Olsen [4] propose several not novel: occupational therapists have been devising solutions to
principles of efficient HRI based on the lessons from evaluating find better fits between individuals and their environments for
neglect tolerance and interface efficiency. Each principle, e.g., decades [13]. In ergonomics-for-one, a solution to a specific
manipulate the world instead of the robot, is motivated by fitting task is referred to as an accommodation system that
relevant factors from cognitive information processing. Olsen and consists of five components: 1) essential task functions; 2)
Goodrich [10] propose several HRI metrics for leveraging human equipment used to accomplish the task; 3) inputs and outputs; 4)
attention to develop HRI interfaces that enhance the task environment in which the task is accomplished; and 5) individual
effectiveness of the human-robot team. Scerri et al. [12] discuss with a disability who desires to accomplish the task.
criteria to determine how to change the autonomy level of the
A performance gap is identified by comparing the essential task
robot to enhance the performance of the human-robot team on the
functions to the disabled individual's capabilities. The assistive
basis of decision costs. Yanco and Drury [14] propose qualitative
device is designed to bridge the performance gap. It should be
taxonomies and qualitative and quantitative metrics for human-
noted that ergonomics-for-one does not define the order in which
robot performance evaluation. Fong et al. [2] offer a detailed
the components must be considered so long as eventually all of
survey of socially interactive robots and a taxonomy of design
them are taken into account.
methods and system components.
Given these approaches, it is natural to ask whether any of them At this point one may ask the question of what exactly
can be readily applied to assess the performance or guide the ergonomics-for-one brings to the table that HRI does not. The
design of a robotic shopping cart for the blind. We do not believe answer is a different research methodology. First, ergonomics-for-
that, at this point in time, this question has a positive answer. one does not assume the existence a common framework that can
There are several reasons to justify our belief. First, these be used to design and assess every assistive device imaginable. To
approaches assume that the operator is capable of maintaining be sure, there are standard procedures that evaluate the extent of
visual contact with the robot, either continuously, when the individual disabilities, e.g., standard vision or hearing tests. But
operator is collocated in the same task space, or part of the time, these tests are used only as inputs to the design process. Second,
when the operator is remote and interacts with the robot through ergonomics-for-one is inherently bottom-up in that it places a
an interface intermediary. Second, existing assessment great deal of emphasis on fitting trials and learning through
frameworks focus on interfaces, autonomy, and task efficiency deployment [13]. The objective of such trials, also known as
and do not take into account the ergonomic interaction between initial usability tests or walk-throughs, is to ascertain the user's
the human and the robot. Third, the scope of many frameworks is comfort, ease of use, preference, and other psychosocial elements.
simply too broad. The other side of generality is inapplicability: it We used a group of five visually impaired individuals from the
is oftentimes more feasible to custom-design a new approach than local visually impaired community in Logan, Utah, to help us
to spend resources on figuring out how to customize an existing analyze the components of an accommodation system that could
generic framework. It was this realization that prompted us to help them do grocery shopping independently. The youngest
look for inspiration outside of the traditional HRI realms. individual was 13, the oldest was 47. Two participants were white
cane users. The other three participants used both guide dogs and
white canes. We met with the individuals in an informal setting
The paper is organized as follows. In Section 2, we review
and asked them about what it would take them to shop
relevant research on human-robot interaction (HRI). In Section 3,
independently. To minimize peer pressure, we met with each
we discuss the basic principles of ergonomics-for-one and present
individual separately.
an ergonomics-for-one analysis to identify the key elements of the
performance gap between the blind individual and the task of Essential task functions: The interviews helped us identify five
independent grocery shopping. In Section 4, we present our initial essential task functions: 1) getting to a supermarket; 2) finding the
design aimed at bridging several elements of the performance gap. needed grocery items; 3) getting through a cash register; 4)
In Section 5, we present our navigation trials with a small sample leaving the store; and 5) getting home. None of the individuals
of visually impaired participants. We describe our experiment had any problems getting to a supermarket and getting home from
design, analyze the collected data, and present the participants' a supermarket. Logan has a free bus system with a network of bus
feedback. In Section 6, we return to bridging the performance stops all over the city and several suburbs. All places where one
gap. We describe how we deployed the robotic shopping cart in a can buy groceries have bus stops close by.
supermarket and discuss what ergonomic modifications we made
in the system after several fitting trials in that environment. In Function 2 was refined into three sub-functions: 1) navigating to a
Section 7, we focus on two major challenges for the future. In shelf section with a needed grocery item; 2) finding the needed
Section 8, we give our conclusions. item on the shelf; and 3) placing the item in a shopping basket.](https://image.slidesharecdn.com/hri2006ergo-111228185559-phpapp01/75/Ergonomics-for-One-in-a-Robotic-Shopping-Cart-for-the-Blind-2-2048.jpg)
![Function 3 was refined into four sub-functions: 1) navigating to a next to other Lays items or other potato chip brands. This is even
cash register; 2) placing the items from the basket on the belt; 3) more of a problem with smaller items, like small bags of
paying for the items; and 4) placing the bagged items back into sunflower seeds. Assuming that the individual does not have
the shopping basket. Function 4 was refined into three sub- manual dexterity problems, once the item is found, the individual
functions: 1) getting to the exit; 2) leaving the basket in a can place it into a shopping basket.
designated place; and 3) exiting the store.
Fifth, the same navigational challenges apply to the function of
Equipment: None of the participants did any grocery shopping getting through a cash register. Additional challenges are knowing
on their own. They either did not do any grocery shopping or used when it is time to start placing the items on the conveyor belt,
sighted guides: parents, siblings, or partners. The only equipment paying for the items, and putting the bagged items back into the
used by the participants were white canes, guide dogs, and basket.
shopping baskets. They could not use shopping carts, because
Sixth, when the shopper is ready to leave the store, she again has
they could not simultaneously handle guide dogs or white canes
to navigate to the exit, thus confronting the navigational
and push the carts.
challenges identified above, and place the basket in the properly
Inputs and outputs: When asked how they would prefer to designated place.
interact with an assistive grocery shopping device, if they had
one, the participants suggested speech and keypad as input 4. BRIDGING THE GAP: PART I
options and speech and dynamic Braille as output options.
4.1 On to a Robotic Shopping Cart
Environment: The target environment was a typical supermarket. After considering the first performance gap component,
There are several features that make this environment particularly independent use of a shopping cart, we concluded that the
challenging. First, there is always some shopper traffic. On navigation performance of the shopping cart had to be automated.
certain days, e.g. Saturday, and during certain hours, e.g., Effectively, the robotic shopping cart would act as a supermarket
between 6 and 8 pm, the shopper traffic is at its highest. Second, guide for blind shoppers. This is, by no means, a novel idea as the
there are indigenous processes already in place, e.g., shelf re- field of AI robotics had built robotic guides before [3]. None of
stocking, cleaning, product scanning, etc., that cannot be the guides, however, were specifically built for blind shoppers in
disrupted. Third, the products are periodically re-shuffled and re- supermarkets. As far as we could see, we had two options:
arranged, and free open spaces are occupied with temporary building a new robotic base with a shopping cart mounted on top
displays and stands. of it or mounting a shopping cart on top of an existing robotic
Individual: Two participants were completely blind. Three base. We chose the second option, because the first option, after a
participants had light perception, i.e., they were able to preliminary cost analysis, looked prohibitively expensive for a
distinguish between light and dark. All participants were research prototype. In addition, we already had experience
ambulatory, did not have any serious speech impediments, mounting equipment on our Pioneer 2DX robotic base from the
hearing problems, or cognitive disabilities. ActivMedia Corporation when we experimented with our robot-
assisted navigation for the blind in indoor environments [6, 7].
After the interviews, we identified the performance gap that had
to be addressed by the accommodation system. First, using a
guide dog and/or a white cane with a shopping cart is not feasible.
Neither guide dogs nor white canes would help avoid front
obstacles if the blind shopper has to push the cart in addition to
handling a guide dog or using a white cane. Of course, it is
possible to use a basket, but the shopper would then be restricted
to buying a small number of items.
Second, since the shopper cannot independently navigate, she
needs to communicate her intentions to a sighted guide. This
would be ordinarily done in natural language if the guide is
human.
Third, the visually impaired participant needs assistance with
Figure 1: RoboCart in Lee's MarketPlace.
navigating to shelf sections with specific grocery items. In an
environment where end points of routes remain static, many guide Thus, we built a polyvinyl chloride (PVC) pipe structure, securely
dog handlers and cane users can learn routes after several trials. mounted it on top of the Pioneer 2DX robotic base, and then
However, this assumption does not hold in supermarkets due to placed a large shopping basket into that structure. The resulting
constant re-arrangements and re-shufflings of products. design, which we called RoboCart, is shown in Figure 1. As one
can easily see from Figure 2, the RoboCart design is a
Fourth, even if it is assumed that the blind shopper can find her modification of RG, our indoor robotic guide for the blind that we
way to the correct shelf section, she still needs to pick the right built in 2003-2004 on top of another Pioneer 2DX base. It should
item. For example, suppose that the blind shopper wants to buy a be noted that this is a proof-of-concept design. The back
bag of Lays Classic and finds her way to the correct shelf section directional wheel of the base is small, which results in the
with Lays potato chips. There is always a chance that the shopper inherent imbalance of this design. While we have not observed
will pick a wrong bag as Lays Classic bags are typically placed any accidents in which RoboCart tipped over, the future design](https://image.slidesharecdn.com/hri2006ergo-111228185559-phpapp01/75/Ergonomics-for-One-in-a-Robotic-Shopping-Cart-for-the-Blind-3-2048.jpg)
![will be modified to have a four-wheel base so that the device will below, there is another reason why Braille may not be a viable
never tip over and injure the blind shopper. option for some users.
4.3 How Do We Navigate?
When we started thinking about bridging the navigational
component of the performance gap, we realized that we had little
knowledge about what aspects of navigation might be important
to the blind navigator. We also did not know if our
communication choices described in the previous section would
be ergonomically acceptable to blind individuals. Finally, we
wanted to find out whether the presence or absence of the human
navigator behind the robot affects the robot's navigation.
To answer these questions, we decided to conduct a series of
fitting trials. We had to find a suitable environment for the trials.
We had started negotiations with Lee's MarketPlace, a
Figure 2: RG, an indoor robotic guide for the blind. supermarket in Logan, Utah, about the possibility of testing
RoboCart in their supermarket. But the negotiations were still in
4.2 How Do We Communicate? progress. We ruled out tests in our CS Department, because we
Upon entering the supermarket, the shopper needs to had already tested our robotic guide in the CS Department rather
communicate her wishes to RoboCart. The input options that we extensively and had achieved satisfactory results [6, 7].
considered were automatic speech recognition (ASR) and keypad.
We chose to conduct fitting trials at the USU Center for Persons
When using ASR, the blind shopper would wear a wireless
with Disabilities (CPD). The CPD occupies an entire building on
microphone coupled to an over-the-ear headphone and
the North USU Campus. The building has an area of 40,000
communicate her intentions to the robot through speech. We will
square feet. It has numerous offices, classrooms, laboratories,
not go into details here on why we ruled out speech as an input
lounges, and bathrooms. Another challenging aspect of this
option, because we have described our reasons in detail in our
environment that makes it similar to a supermarket is numerous
previous publications [6]. In brief, our ASR experiments, both in
activities occur there during its working hours. Thus, other people
noisy and noise-free environments, had recognition rates of below
going about their business, i.e., human traffic, are an integral part
50 percent even though all of our participants were native
of the environment.
speakers of American English. Our decision to rule out ASR as an
input option should not be construed as a general argument
against ASR as an HRI mode. Rather, we concluded that, given 5. FITTING TRIALS
the current state of the art in commercial ASR and the constraints
of our problem, we should explore the keypad first.
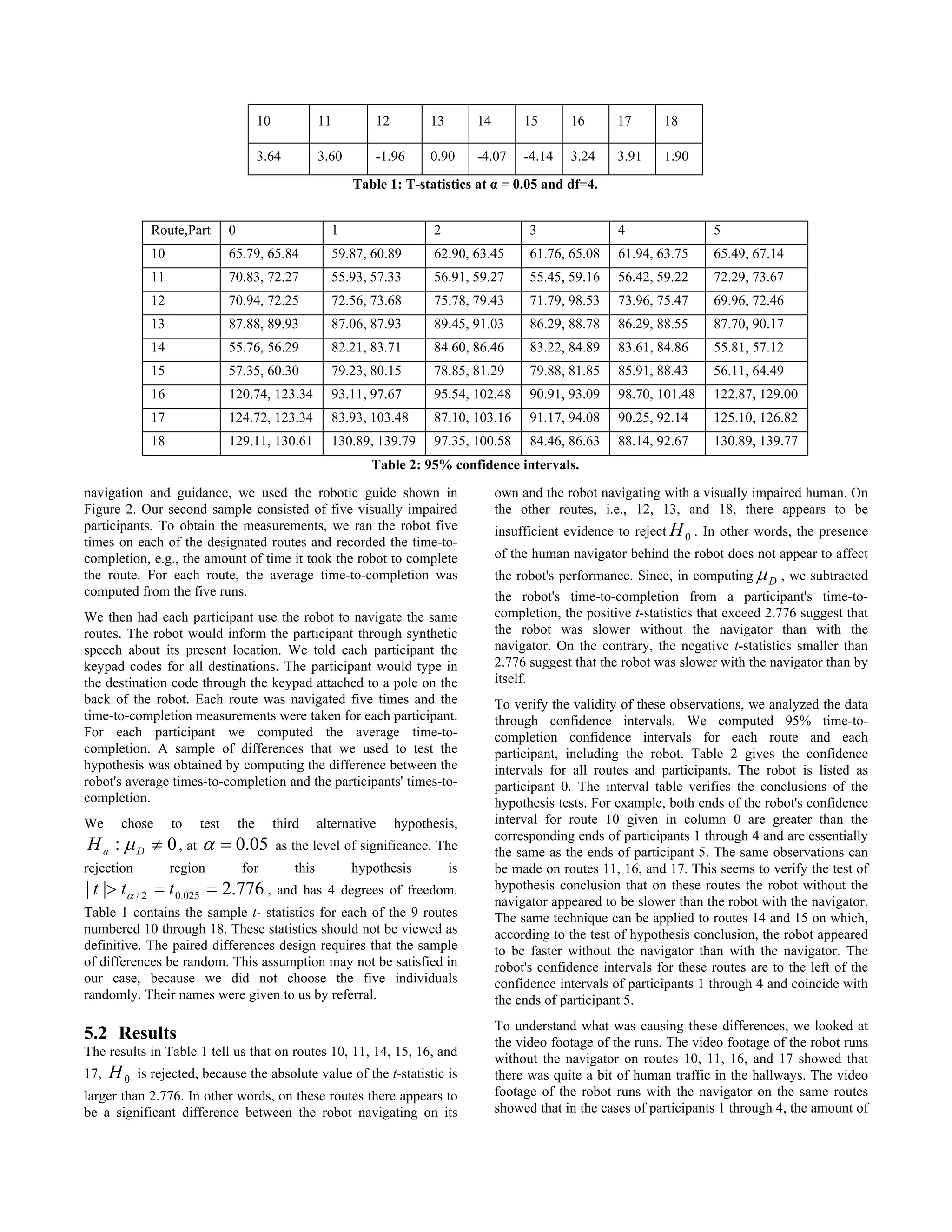
5.1 Experiment Design
We used the paired differences strategy to design our pilot
The input option that we chose was a small 10-key Belkin experiments. In a paired difference experiment, one is interested
numeric keypad. The layout of keys on the keypad is the same as to find the mean difference between two methods of conducting
the layout of keys on the cell phone. Since many visually some activity, which, in our case, is navigation. A data point is
impaired people use cell phones, our thinking was that the obtained by numerically measuring the performances of two
learning curve would not be steep. In addition, the number 5 key participants, say X and Y, from two different samples doing a
on Belkin keypads has a small plastic protrusion that the visually designated activity and computing the difference between the two
impaired can sense through touch. Once the number 5 key is measurements. When a sample of differences is obtained, one can
found, it is easy to find the other keys. test two hypotheses: the null hypothesis, H 0 : µ D = 0 , against
one of the three alternative hypotheses, H a : µ D > 0 ,
When compared to ASR, the keypad does reduce input ambiguity.
However, even with the keypad the proverbial problem of shared
vocabulary does not go away. The user still must know what to H a : µ D < 0 , and H a : µ D ≠ 0 , where µ D is the mean
type into the robot to make the robot do what the user wants. To
overcome this problem, we decided to create a Braille directory. difference. Essentially, H 0 suggests that there is no difference in
The directory was to be realized as a Braille sheet with
performance, whereas H a ’s suggest that there may be a
instructions that map each destination to a short sequence of
numbers. The semantics of each line was to be as follows: if you difference. The test statistic is a one-sample
want to go to destination X, please type this numerical sequence
into the keypad.
t = x D / s D / n D , where x D is the sample mean
The next element of the communication gap is output. The difference, s D is the standard deviation of the differences, and
options that we considered were synthetic speech and dynamic n D is the number of differences.
Braille displays. As we investigated dynamic Braille displays, we
found out that they were expensive: the cheapest option we could We selected a total of 9 routes in the environment. Each route was
find was approximately 5K USD. Originally, the cost was the more than 40 meters in length and had 3 to 5 turns. In our case,
main reason why we decided on synthetic speech. As we discuss our first sample consisted of the robot. Since we focused on](https://image.slidesharecdn.com/hri2006ergo-111228185559-phpapp01/75/Ergonomics-for-One-in-a-Robotic-Shopping-Cart-for-the-Blind-4-2048.jpg)
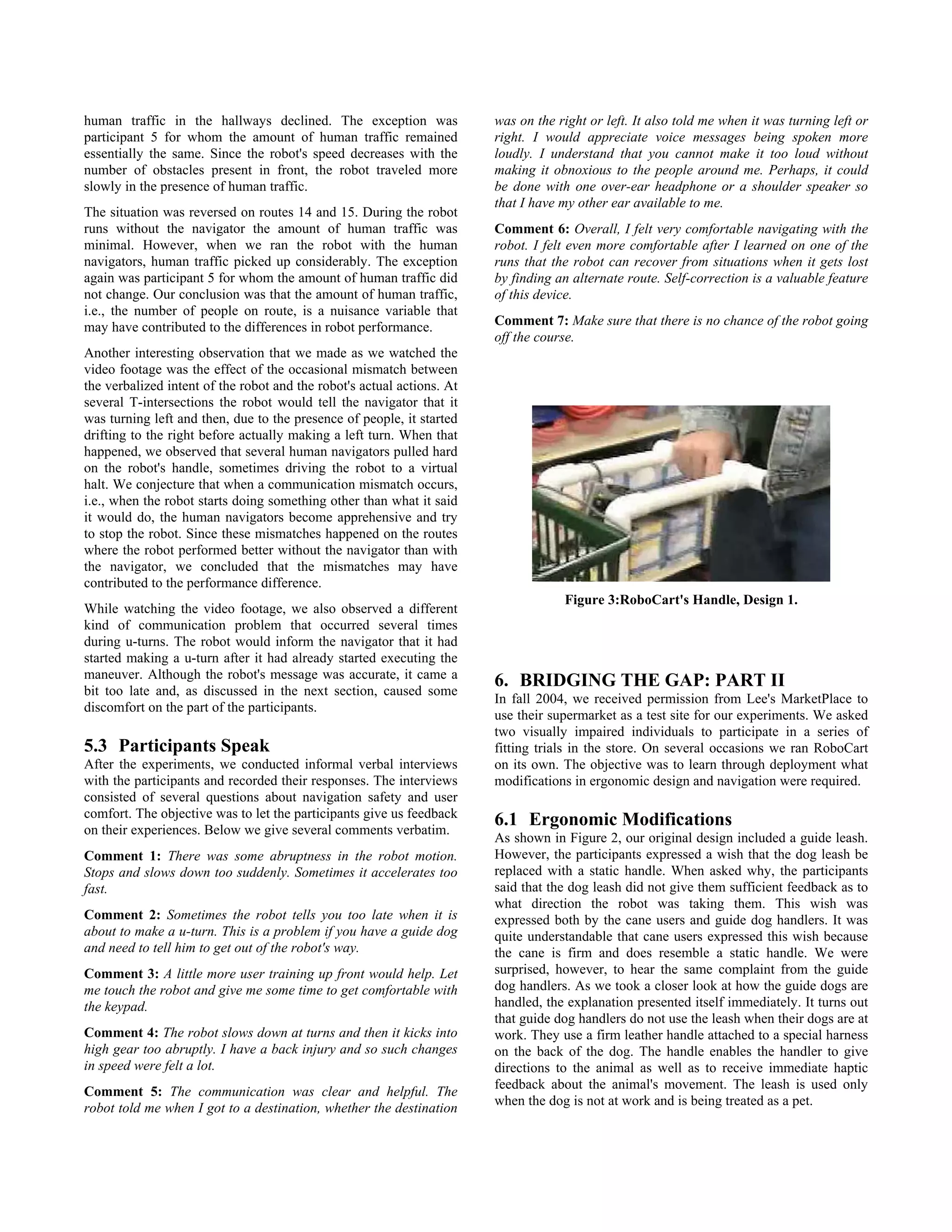
![The above lesson led to our first modification - the addition of a boxes and similar movable objects being placed into them by the
static handle shown in Figure 3. The keypad hangs on the right store staff. After investigating the possibility of using Markov
pole of the handle. After several trials in Lee's MarketPlace, we localization [3], we decided against it because of safety concerns.
realized that the keypad's position was inconvenient for the user. Most applications of Markov localization indoors are based on
It is difficult to access the keypad quickly when the robot is laser range finding. Laser range finding does not perform well in
moving. To reach for the keypad requires letting go of the handle. large open spaces or environments with large glassy surfaces that
Using the other hand is impossible as it is occupied with a cane or absorb laser signals. The performance of Markov localization is
a leash. not predictable in dynamic environments and degrades in the
presence of numerous dynamic obstacles.
We considered extending our RFID-based navigation to open
spaces by putting portable towers with RFID tags. We rejected
this idea, too, because it called for a great deal of calibration and
instrumentation and could be too disruptive to the indigenous
business processes. We discussed our problem with the
supermarket's owner and a senior store manager. They suggested
that we put masking tape lines on the floor and use them for
navigating large open spaces. In their opinion, if the system were
to be deployed in their store permanently, they could easily paint
such lines on the floor. As long as the paint was resistant to the
floor wax, the lines were not a problem.
Figure 4: RoboCart's Handle, Design 2.
Figure 4 shows how we modified this design by changing the
position of the keypad. We purchased the wireless version of the
same keypad, attached it to a small plastic rectangle, and then
attached the rectangle to the handle's bar. This position allows the
navigator to quickly reach for the keypad during the navigation
without letting go of the handle.
We also learned that Braille may not be feasible. Of the seven
visually impaired people that we informally polled about the
possibility of using Braille on the robot only 2 were comfortable
with the idea. As we investigated the matter further and talked Figure 6: RoboCart following a line.
with the assistive technology specialists at the USU Center for RoboCart was equipped with a small LogiTech web camera.
Persons with Disabilities, we learned that only a small fraction of Figure 5 shows how the camera was added to the robotic base.
visually impaired people use Braille. This fraction consists mostly We put one masking tape line from the lobby and up to the aisles.
of people who are blind from birth. People who lose vision later A simple vision-based line following algorithm was written and
in their lives due to accident, illness, or age either never learn successfully tested on several runs. Figure 6 shows how RoboCart
Braille or use it rather slowly. follows the line to reach an aisle. Once in the aisles, our original
RFID-based navigation algorithm was used. One aisle has 5
shelves on both sides. An RFID tag is placed every 3 meters on
the 2nd or 3rd shelf on both sides of the aisle so that the robot's
RFID antenna can detect it. Thus, every aisle in which we tested
RoboCart is equipped with 10 RFID tags: 5 on the left side and 5
on the right side. There is also a designated cash register where
RoboCart takes the blind shopper. The cash register is equipped
with two RFID tags. The first tag makes RoboCart stop and
inform the blind shopper that the products can be unloaded onto
the belt on the right. The second tag informs the shopper that she
has to wait for the bagger to put the bags into the cart. The store
management was comfortable with this instrumentation plan.
Figure 5: RoboCart's Camera.
6.2 Navigation Modifications 7. A Glimpse of the Future
Several important modifications were made to our navigation When we learned that Braille may not be a viable option, we
algorithm. The original algorithm was designed for structured replaced Braille with a voice-based directory based on synthetic
indoor environments [7], which was fine for navigating speech. Instead of reading Braille, a blind person uses the keypad
supermarket aisles. The algorithm did not work in large open to scroll up and down the voice menu in which each line is spoken
spaces, such as supermarket lobbies. Besides having a lot of to the user by the speech synthesis software. Modern grocery
customer traffic, supermarket lobbies constantly change in terms stores carry thousands of items. One challenge that we are
of their layout due to promotion displays, flower stands, product](https://image.slidesharecdn.com/hri2006ergo-111228185559-phpapp01/75/Ergonomics-for-One-in-a-Robotic-Shopping-Cart-for-the-Blind-7-2048.jpg)
![currently investigating is how to organize the directory for easy 10. REFERENCES
browsing. [1] Fong, T., Kaber, D., Lewis, M., Scholtz, J., Schultz, A., and
Since the RFID tags must be placed on both sides of each aisle, Steinfield, A. Common Metrics for Human-Robot
the approximate layout of the store must be known in advance. Interaction. In citeseer.csail.mit.edu/667916.html.
This layout must be maintained by the store. Thus, another [2] Fong, T., Nourbakhsh, I., and Dautenhahn, K. A Survey of
challenge is how the store maintains the layout so that the robotic Socially Interactive Robots. Robotics and Autonomous
shopping cart always guides the blind shopper to the appropriate Systems, 42:143-166, 2003.
shelf.
[3] Fox, D., Burgard, W., and Thrun, S. Markov Localization for
Another ergonomic challenge is access to individual items. Mobile Robots in Dynamic Environments. Journal of AI
RoboCart leads the blind person to shelf sections, not to Research, 11:391-427, 1999.
individual items. For example, it will guide the person to the shelf [4] Goodrich, M. and Olsen, D. Seven Principles of Efficient
section with Lays potato chips, but the person still has to pick up Human-Robot Interaction. In Proceedings of the IEEE
an individual bag and put it into the robot's shopping basket. To International Conference on Systems, Man, and Cybernetics,
address this problem, we have integrated a small portable barcode pp. 3943-3948. IEEE, October 2003.
reader into the system. Grocery stores already use barcode
reading technologies to keep track of their price inventories. The [5] Howard, A. A Methodology to Assess Performance of
scenario that we are currently experimenting with is as follows: Human-Robotic Systems in Achievement of Collective
RoboCart gets the blind shopper to a shelf section with a bunch of Tasks. In Proceedings of the International Conference on
individual items, the shopper then uses a handheld barcode reader Intelligent Robots and Systems (IROS). IEEE/RSJ, July 2005.
to read the barcodes on the shelf until the barcode of the right [6] Kulyukin, V., Gharpure, C., De Graw, N., Nicholson, J., and
item is found. Under this scenario, the shopper has to find the Pavithran, S. A Robotic Wayfinding System for the Visually
shelf and then slide the barcode reader along the shelf and listen Impaired. In Proceedings of the Innovative Applications of
until a speech message tells the user that the proper barcode is Artificial Intelligence Conference (IAAI), pp. 864-869.
read. AAAI, July 2004.
[7] Kulyukin, V., Gharpure, C., Nicholson, J., and S. Pavithran.
8. CONCLUSIONS RFID in Robot-Assisted Indoor Navigation for the Visually
In this paper we showed how the basic principles of ergonomics- Impaired. In Proceedings of the IEEE International
for-one were applied to the design and development of a proof-of- Conference on Intelligent Robots and Systems (IROS).
concept robotic shopping cart for the blind. We identified the IEEE/RSJ, October 2004.
performance gap that must be overcome by an accommodation [8] LaPlante, M. and Carson, D. Disability in the United States:
system that allows the blind to shop independently. We described Prevalence and Causes. U.S. Department of Education,
our initial usability tests and showed how the tests shaped the Washington, DC, 2000.
ergonomic modifications of the system.
[9] McQuistion, L. Rehabilitation Engineering: Ergonomics for
One. Ergonomics in Design, January:9-10, 1993.
9. ACKNOWLEDGMENTS
The first author would like to acknowledge that this research has [10] Olsen, D and Goodrich, M. Metrics for Evaluating Human-
been supported, in part, through NSF CAREER grant (IIS- Robot Interactions. In Performance Metrics for Intelligent
0346880) and two Community University Research Initiative Systems (PERMIS). NIST, September, 2003.
(CURI) grants (CURI-04 and CURI-05) from the State of Utah. [11] Pollack, M. Intelligent Technology for the Aging Population.
We would like to thank Mr. Lee Badger, the owner of Lee's AI Magazine, 26(2):9-24, 2005.
MarketPlace, for allowing us to use his supermarket in Logan,
[12] Scerri, P., Pynadath, D., and Tambe, M. Toward Adjustable
Utah, as a research site. We are grateful to John Nicholson, our
Autonomy for the Real World. Journal of AI Research,
research colleague at USU CSATL, for helping us to conduct
17:171-228, 2002.
many fitting trials. We would like to thank Ying Bing, a CS
graduate student, for implementing the line following algorithm. [13] E. Berg. Ergonomics in Health Care and Rehabilitation.
Finally, we would like to thank the visually impaired participants Butterworth-Heinemann, Woburn, MA, 1998.
in our experiments for their valuable feedback. [14] Yanco, H. and Drury, J. A Taxonomy for Human-Robot
Interaction. In Proceedings of the AAAI Fall Symposium on
Human-Robot Interaction, pp. 111-119, 2002.](https://image.slidesharecdn.com/hri2006ergo-111228185559-phpapp01/75/Ergonomics-for-One-in-a-Robotic-Shopping-Cart-for-the-Blind-8-2048.jpg)

This document discusses the development of a robotic shopping cart for visually impaired individuals to facilitate independent grocery shopping, addressing challenges such as navigation and carrying items. It employs an 'ergonomics-for-one' approach, focusing on tailoring solutions to the specific needs of disabled users rather than applying generic frameworks. Through user trials and iterative design, the project aims to improve accessibility in dynamic supermarket environments, highlighting key functions required by visually impaired shoppers.
















































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)






