Downloaded 65 times


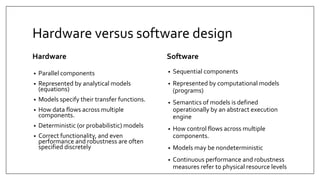
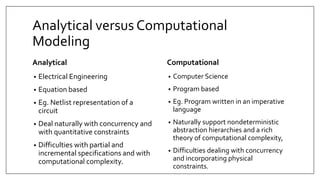
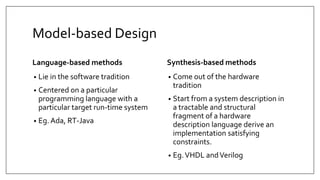


The document discusses several challenges in embedded systems design. It notes that current scientific foundations separate hardware and software design paradigms in ways that make integrating computation and physical constraints difficult. Engineering practices also separate critical and best-effort design methods. The document argues that a successful approach to embedded systems design needs a mathematical basis that integrates abstract-machine and transfer-function models, allows combining critical and best-effort engineering, and encompasses heterogeneous components through constructs like compositionality and non-interference rules.