






![Program Counter (r15)
• When the processor is executing in ARM state:
– All instructions are 32 bits wide
– All instructions must be word aligned
– Therefore the PC value is stored in bits [31:2] with bits [1:0] undefined (as
instruction cannot be halfword or byte aligned).
• When the processor is executing in Thumb state:
– All instructions are 16 bits wide
– All instructions must be halfword aligned
– Therefore the PC value is stored in bits [31:1] with bit [0] undefined (as
instruction cannot be byte aligned).
• When the processor is executing in Jazelle state:
– All instructions are 8 bits wide
– Processor performs a word access to read 4 instructions at once](https://image.slidesharecdn.com/armfinal-111111132748-phpapp01/85/ARM-Processor-11-320.jpg)










![Logical Operations
• Operations are:
– AND operand1 AND operand2
– EOR operand1 EOR operand2
– ORR operand1 OR operand2
– BIC operand1 AND NOT operand2 [ie bit clear]
• Syntax:
– <Operation>{<cond>}{S} Rd, Rn, Operand2
• Examples:
– AND r0, r1, r2
– BICEQ r2, r3, #7
– EORS r1,r3,r0](https://image.slidesharecdn.com/armfinal-111111132748-phpapp01/85/ARM-Processor-24-320.jpg)


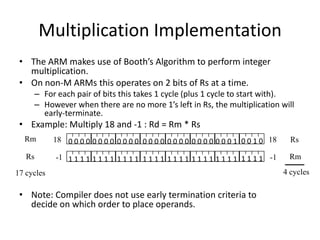






![Base Register
• STR r0,[r1] Stores content in address contained in r1 in r0
LDR r2,[r1] Loads content in address contained in r1 to r2
r0 Memory
Source
0x5
Register
for STR
r1 r2
Base Destination
0x200 0x200 0x5 0x5
Register Register
for LDR](https://image.slidesharecdn.com/armfinal-111111132748-phpapp01/85/ARM-Processor-36-320.jpg)

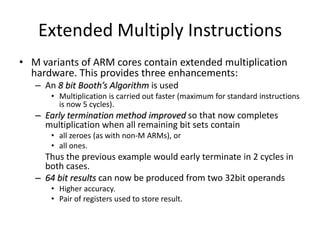
![Pre-Indexed Addressing
• Example :STR r0,[r1,#12]
r0 Source
Memory
0x5 Register
Offset for STR
12 0x20c 0x5
r1
Base 0x200 0x200
Register
•Offset value can as well be -12 (STR r0,[r1,#-12])
•To perform auto increment on base reg STR r0,[r1,#12]!
-updates base register to value 0x20C
•If r2 contains 3 then this will yield the same result
STR r0,[r1,r2,LSL#2]
•Useful if only a particular element is to be accessed](https://image.slidesharecdn.com/armfinal-111111132748-phpapp01/85/ARM-Processor-38-320.jpg)
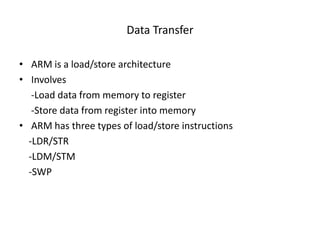
![Post Indexed Addressing
• Example :STR r0,[r1],#12
Memory
Updated r1 Offset r0 Source
Base 0x20c 12 0x20c 0x5 Register
Register for STR
0x200 0x5
Original r1
Base 0x200
Register
•If r2 contains 3 then this will also yield the same result
STR r0,[r1],r2,LSL #2
•Useful if traversal is required through elements](https://image.slidesharecdn.com/armfinal-111111132748-phpapp01/85/ARM-Processor-39-320.jpg)






































The document provides a comprehensive overview of the ARM architecture, detailing its instruction set, processor modes, and specific features such as conditional execution and data movement operations. It covers various ARM processors, including different families and their enhancements, as well as the various modes of operation and register organization. Additionally, it highlights the ARM instruction set's efficiency and applicability in embedded systems and low-power devices.