Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Hirokazu Onomichi
PDF, PPTX
2,511 views
ビーズセッターロボットのためのDYNAMIXEL Workbenchの評価
ビーズセッターロボットのために DYNAMIXEL Workbench (ROS版)を使ってみて、ハマったところやその感想など。 2019/08/25 瀬戸内ROS勉強会(第03回)LT資料
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 28
2
/ 28
3
/ 28
4
/ 28
5
/ 28
6
/ 28
7
/ 28
8
/ 28
Most read
9
/ 28
Most read
10
/ 28
11
/ 28
12
/ 28
13
/ 28
14
/ 28
Most read
15
/ 28
16
/ 28
17
/ 28
18
/ 28
19
/ 28
20
/ 28
21
/ 28
22
/ 28
23
/ 28
24
/ 28
25
/ 28
26
/ 28
27
/ 28
28
/ 28
More Related Content
PDF
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
by
Kitsukawa Yuki
PDF
リンク機構を有するロボットをGazeboで動かす
by
tomohiro kuwano
PDF
ROS2勉強会 4章前半
by
tomohiro kuwano
PDF
06 第5.1節-第5.7節 ROS2に対応したツール/パッケージ
by
Mori Ken
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
tf,tf2完全理解
by
Koji Terada
PDF
つながるロボット 〜分散協調ロボットの開発を加速化するROSの紹介〜
by
Hideki Takase
PDF
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
by
Kitsukawa Yuki
リンク機構を有するロボットをGazeboで動かす
by
tomohiro kuwano
ROS2勉強会 4章前半
by
tomohiro kuwano
06 第5.1節-第5.7節 ROS2に対応したツール/パッケージ
by
Mori Ken
オープンソース SLAM の分類
by
Yoshitaka HARA
tf,tf2完全理解
by
Koji Terada
つながるロボット 〜分散協調ロボットの開発を加速化するROSの紹介〜
by
Hideki Takase
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
What's hot
PDF
Jetson活用セミナー ROS2自律走行実現に向けて
by
Fixstars Corporation
PDF
01 ROS2 実用化に関するサーベイ ROS2勉強合宿 @別府温泉
by
Mori Ken
PDF
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
by
SSII
PDF
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
PDF
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
PPTX
なぜなにリアルタイムレンダリング
by
Satoshi Kodaira
PDF
ros_whillとROS2対応(ROS勉強会第28回LT大会)
by
Seiya Shimizu
PDF
【GCC18】PUBGライクなゲームをUnityだけで早く確実に作る方法 〜ひとつのUnity上でダミークライアントを100個同時に動かす〜
by
モノビット エンジン
PDF
四脚ロボットによる つくばチャレンジへの取り組み
by
kiyoshiiriemon
PDF
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
PDF
ROS2勉強会@別府 第7章Pythonクライアントライブラリrclpy
by
Atsuki Yokota
PDF
03 第3.6節-第3.8節 ROS2の基本機能(2/2)
by
Mori Ken
PDF
RedmineのFAQとアンチパターン集
by
akipii Oga
PDF
深層強化学習と実装例
by
Deep Learning Lab(ディープラーニング・ラボ)
PPTX
3次元SLAMは誰でもできるよ。そう、TX2とTurtleBot3ならね。
by
ROBOTIS Japan
PDF
UE4ディープラーニングってやつでなんとかして!環境構築編(Python3+TensorFlow)
by
エピック・ゲームズ・ジャパン Epic Games Japan
PDF
[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision
by
Deep Learning JP
PDF
Visual slam
by
Takuya Minagawa
PDF
OpenCM IDE、OpenCM 485 EXPを用いてのDynamixel Xシリーズの制御
by
ROBOTIS Japan
PDF
FPGAをロボット(ROS)で「やわらかく」使うには
by
Hideki Takase
Jetson活用セミナー ROS2自律走行実現に向けて
by
Fixstars Corporation
01 ROS2 実用化に関するサーベイ ROS2勉強合宿 @別府温泉
by
Mori Ken
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
by
SSII
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
なぜなにリアルタイムレンダリング
by
Satoshi Kodaira
ros_whillとROS2対応(ROS勉強会第28回LT大会)
by
Seiya Shimizu
【GCC18】PUBGライクなゲームをUnityだけで早く確実に作る方法 〜ひとつのUnity上でダミークライアントを100個同時に動かす〜
by
モノビット エンジン
四脚ロボットによる つくばチャレンジへの取り組み
by
kiyoshiiriemon
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
ROS2勉強会@別府 第7章Pythonクライアントライブラリrclpy
by
Atsuki Yokota
03 第3.6節-第3.8節 ROS2の基本機能(2/2)
by
Mori Ken
RedmineのFAQとアンチパターン集
by
akipii Oga
深層強化学習と実装例
by
Deep Learning Lab(ディープラーニング・ラボ)
3次元SLAMは誰でもできるよ。そう、TX2とTurtleBot3ならね。
by
ROBOTIS Japan
UE4ディープラーニングってやつでなんとかして!環境構築編(Python3+TensorFlow)
by
エピック・ゲームズ・ジャパン Epic Games Japan
[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision
by
Deep Learning JP
Visual slam
by
Takuya Minagawa
OpenCM IDE、OpenCM 485 EXPを用いてのDynamixel Xシリーズの制御
by
ROBOTIS Japan
FPGAをロボット(ROS)で「やわらかく」使うには
by
Hideki Takase
More from Hirokazu Onomichi
PDF
VRChatとシリアル通信、現実と仮想を結ぶ ~UdonとPythonによる仮想COMポートのつくり方~
by
Hirokazu Onomichi
PDF
だみとらの作り方 ~制作過程で気づいてしまったVRChat IKの残念な真実~
by
Hirokazu Onomichi
PDF
ROSでつながるVRChat
by
Hirokazu Onomichi
PDF
仮想のPremaidAIを、既存のロボット用ボードで動かしてみた話
by
Hirokazu Onomichi
PDF
Nuitrackを用いて自作ヒューマノイドを動かしてみた話
by
Hirokazu Onomichi
PDF
ROSを用いた天吊型スカラロボットの共同製作
by
Hirokazu Onomichi
PDF
ROSConJP2019とWMD2019の出張報告!
by
Hirokazu Onomichi
PDF
瀬戸内ROS勉強会の紹介~地方でROSを勉強するコツ~
by
Hirokazu Onomichi
PDF
ROS2講習会の報告 (瀬戸内ROS勉強会#02にて)
by
Hirokazu Onomichi
PDF
瀬戸内ROS勉強会のご紹介
by
Hirokazu Onomichi
PPTX
ぼくのかんがえる、さいきょうのすからろぼっと()
by
Hirokazu Onomichi
PDF
あるくエクセルの話
by
Hirokazu Onomichi
VRChatとシリアル通信、現実と仮想を結ぶ ~UdonとPythonによる仮想COMポートのつくり方~
by
Hirokazu Onomichi
だみとらの作り方 ~制作過程で気づいてしまったVRChat IKの残念な真実~
by
Hirokazu Onomichi
ROSでつながるVRChat
by
Hirokazu Onomichi
仮想のPremaidAIを、既存のロボット用ボードで動かしてみた話
by
Hirokazu Onomichi
Nuitrackを用いて自作ヒューマノイドを動かしてみた話
by
Hirokazu Onomichi
ROSを用いた天吊型スカラロボットの共同製作
by
Hirokazu Onomichi
ROSConJP2019とWMD2019の出張報告!
by
Hirokazu Onomichi
瀬戸内ROS勉強会の紹介~地方でROSを勉強するコツ~
by
Hirokazu Onomichi
ROS2講習会の報告 (瀬戸内ROS勉強会#02にて)
by
Hirokazu Onomichi
瀬戸内ROS勉強会のご紹介
by
Hirokazu Onomichi
ぼくのかんがえる、さいきょうのすからろぼっと()
by
Hirokazu Onomichi
あるくエクセルの話
by
Hirokazu Onomichi
ビーズセッターロボットのためのDYNAMIXEL Workbenchの評価
1.
DYNAMIXEL Workbenchの評価 Onomichi Hirokazu 2019.08.25 瀬戸内ROS勉強会LT ビーズセッターロボットのための
2.
Onomichi Hirokazu みっちー =
Micchy @Dream_Drive • 本業は医療機器の会社 医療ソフトウェア=画像診断関連etc… • メイカー系イベントやロボコンをうろうろ • 社会人ロボコニスト • ROSCon JP2018からボチボチROSを使い始める • Dynamixelユーザー 14年 (2005年~) 自己紹介
3.
本会の課題の確認 瀬戸内ROS勉強会共通課題: スカラロボットでビーズセッターを再現する 今回はそのスカラロボットで使う アクチュエーターのことについて 考えました。
4.
ROS対応の ロボット用アクチュエータといえば… rosserial + Arduino
+ PWMサーボ? いやいやいや!?
5.
ROS対応の ロボット用アクチュエータといえば… DYNAMIXL ・高速なシリアル通信で直接指示 ・デイジーチェーン可能 ・PIDゲイン等プログラム可能 ・燃えない(比較的) ・結合するための多数のねじ穴があって便利 ・メーカーとしてROSへの対応が熱心!
6.
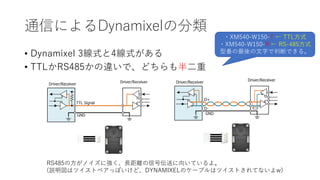
通信によるDynamixelの分類 • Dynamixel 3線式と4線式がある •
TTLかRS485かの違いで、どちらも半二重 RS485の方がノイズに強く、長距離の信号伝送に向いているよ。 (説明図はツイストペアっぽいけど、DYNAMIXELのケーブルはツイストされてないよw) ・XM540-W150-T ← TTL方式 ・XM540-W150-R ← RS-485方式 型番の最後の文字で判断できる。
7.
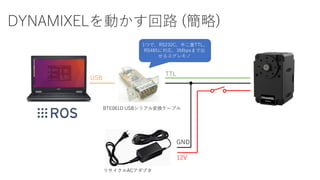
BTE061D USBシリアル変換ケーブル 1つで、RS232C、半二重TTL、 RS485に対応、3Mbpsまで出 せるスグレモノ USB TTL 12V GND リサイクルACアダプタ DYNAMIXELを動かす回路 (簡略)
8.
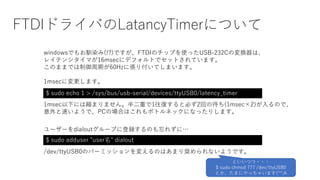
FTDIドライバのLatancyTimerについて $ sudo echo
1 > /sys/bus/usb-serial/devices/ttyUSB0/latency_timer windowsでもお馴染み(!?)ですが、FTDIのチップを使ったUSB-232Cの変換器は、 レイテンシタイマが16msecにデフォルトでセットされています。 このままでは制御周期が60Hzに張り付いてしまいます。 1msecに変更します。 1msec以下には縮まりません。半二重で1往復すると必ず2回の待ち(1msec×2)が入るので、 意外と速いようで、PCの場合はこれもボトルネックになったりします。 $ sudo adduser "user名" dialout ユーザーをdialoutグループに登録するのも忘れずに… /dev/ttyUSB0のパーミッションを変えるのはあまり奨められないようです。 といいつつ・・・ $ sudo chmod 777 /dev/ttyUSB0 とか、たまにやっちゃいます(^^;A
9.
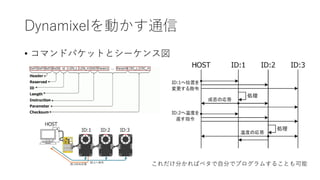
Dynamixelを動かす通信 • コマンドパケットとシーケンス図 これだけ分かればベタで自分でプログラムすることも可能
10.
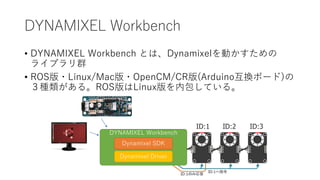
DYNAMIXEL Workbench • DYNAMIXEL
Workbench とは、Dynamixelを動かすための ライブラリ群 • ROS版・Linux/Mac版・OpenCM/CR版(Arduino互換ボード)の 3種類がある。ROS版はLinux版を内包している。 DYNAMIXEL Workbench Dynamixel SDK Dynamixel Driver
11.
“apt install”できる “dynamixel”の名の付くROSパッケージ • ros-melodic-dynamixel-sdk •
ros-melodic-dynamixel-sdk-dbgsym • ros-melodic-dynamixel-workbench • ros-melodic-dynamixel-workbench-controllers • ros-melodic-dynamixel-workbench-controllers-dbgsym • ros-melodic-dynamixel-workbench-msgs • ros-melodic-dynamixel-workbench-operators • ros-melodic-dynamixel-workbench-operators-dbgsym • ros-melodic-dynamixel-workbench-single-manager • ros-melodic-dynamixel-workbench-single-manager-dbgsym • ros-melodic-dynamixel-workbench-single-manager-gui • ros-melodic-dynamixel-workbench-single-manager-gui-dbgsym • ros-melodic-dynamixel-workbench-toolbox • ros-melodic-dynamixel-workbench-toolbox-dbgsym 多いわっ! ※ ROS melodicの場合
12.
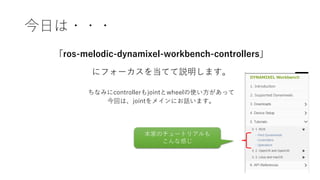
今日は・・・ 「ros-melodic-dynamixel-workbench-controllers」 にフォーカスを当てて説明します。 ちなみにcontrollerもjointとwheelの使い方があって 今回は、jointをメインにお話います。 本家のチュートリアルも こんな感じ
13.
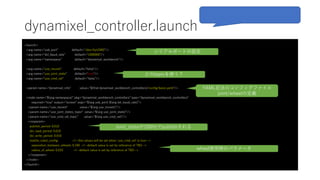
dynamixel_controller.launch <launch> <arg name="usb_port" default="/dev/ttyUSB0"/> <arg
name="dxl_baud_rate" default=“1000000"/> <arg name="namespace" default="dynamixel_workbench"/> <arg name="use_moveit" default="false"/> <arg name="use_joint_state" default="true"/> <arg name="use_cmd_vel" default="false"/> <param name="dynamixel_info" value="$(find dynamixel_workbench_controllers)/config/basic.yaml"/> <node name="$(arg namespace)" pkg="dynamixel_workbench_controllers" type="dynamixel_workbench_controllers" required="true" output="screen" args="$(arg usb_port) $(arg dxl_baud_rate)"> <param name="use_moveit" value="$(arg use_moveit)"/> <param name="use_joint_states_topic" value="$(arg use_joint_state)"/> <param name="use_cmd_vel_topic" value="$(arg use_cmd_vel)"/> <rosparam> publish_period: 0.010 dxl_read_period: 0.010 dxl_write_period: 0.010 mobile_robot_config: <!--this values will be set when 'use_cmd_vel' is true--> seperation_between_wheels: 0.160 <!--default value is set by reference of TB3--> radius_of_wheel: 0.033 <!--default value is set by reference of TB3--> </rosparam> </node> </launch> Joint_stateが100Hzでpublishされる YAML記法のコンフィグファイル joint/wheelの定義 どのtopicを使う? シリアルポートの設定 wheel使用時のパラメータ
14.
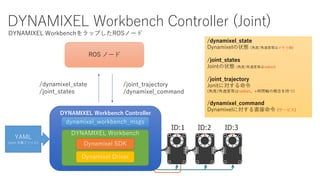
DYNAMIXEL Workbench Controller
(Joint) DYNAMIXEL Workbench Controller DYNAMIXEL Workbench Dynamixel SDK Dynamixel Driver dynamixel_workbench_msgs ROS ノード /dynamixel_state /joint_states /joint_trajectory /dynamixel_command YAML (joint 定義ファイル) /dynamixel_state Dynamixelの状態 (角度/角速度等はメモリ値) /joint_states Jointの状態 (角度/角速度等はradian) /joint_trajectory Jonitに対する命令 (角度/角速度等はradian、+時間軸の概念を持つ) /dynamixel_command Dynamixelに対する直接命令 (サービス) DYNAMIXEL WorkbenchをラップしたROSノード
15.
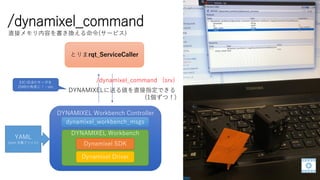
/dynamixel_command DYNAMIXEL Workbench Controller DYNAMIXEL
Workbench Dynamixel SDK Dynamixel Driver dynamixel_workbench_msgs とりまrqt_ServiceCaller /dynamixel_command (srv) YAML (joint 定義ファイル) DYNAMIXELに送る値を直接指定できる (1個ずつ!) EX) ID:8のサーボを 2048の角度に!…etc 直接メモリ内容を書き換える命令(サービス)
16.
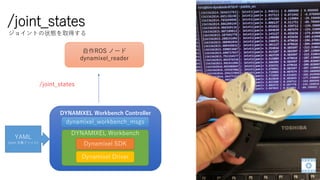
/joint_states DYNAMIXEL Workbench Controller DYNAMIXEL
Workbench Dynamixel SDK Dynamixel Driver dynamixel_workbench_msgs 自作ROS ノード dynamixel_reader /joint_states YAML (joint 定義ファイル) ジョイントの状態を取得する
17.
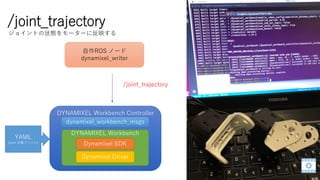
/joint_trajectory DYNAMIXEL Workbench Controller DYNAMIXEL
Workbench Dynamixel SDK Dynamixel Driver dynamixel_workbench_msgs 自作ROS ノード dynamixel_writer /joint_trajectory YAML (joint 定義ファイル) ジョイントの状態をモーターに反映する
18.
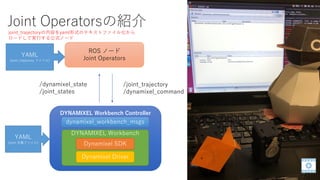
Joint Operatorsの紹介 DYNAMIXEL Workbench
Controller DYNAMIXEL Workbench Dynamixel SDK Dynamixel Driver dynamixel_workbench_msgs ROS ノード Joint Operators /dynamixel_state /joint_states /joint_trajectory /dynamixel_command YAML (joint 定義ファイル) joint_trajectoryの内容をyaml形式のテキストファイル化から ロードして実行する公式ノード YAML (joint_trajectory ファイル)
19.
joint_trajectoryとは • JointTrajectoryPoint • 1関節分の位置指令(角度)、速度指令(角速度)、加速度指令(角加速度)、力指 令(トルク)とスタートからの実行時間がセットになったもの •
JointTrajectory • JointTrajectoryPointを複数関節分まとめたもの、かつその関節の名前の定義 ・ジョイント名[] ・JointTrajectryPoint [] ・位置[] ・速度[] ・加速度[] ・力指令[] ・スタートからの時間[]
20.
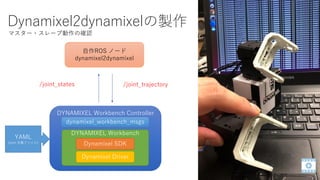
Dynamixel2dynamixelの製作 DYNAMIXEL Workbench Controller DYNAMIXEL
Workbench Dynamixel SDK Dynamixel Driver dynamixel_workbench_msgs 自作ROS ノード dynamixel2dynamixel /joint_states /joint_trajectory YAML (joint 定義ファイル) マスター・スレーブ動作の確認
21.
Dynamixel2dynamixelを拡張してみよう ROBOTISさんから発売予定の 2XL-430-W250-T の、βテストの話をいただいて”上半身ロボット”製作しました。 2XL-430-W250-Tは、名前の通り XL-430-W250-TがニコイチになったDynamixelです。 プログラムもそのまま使えて、軽くて、小さくて、 便利な直交サーボです。 上半身ロボット3号機
23.
Dynamixel2dynamixel 拡張時に経験した謎の制約 • Joint_trajectryの実行時間(time_from_start)を0.02secに設定 (何故か、それ以下だと動かない) • [0]
の1ポーズのみを40Hzでpublishし続ける (何故か、それ以上の周期だと動かない) ナンジャコリャ・・・。
25.
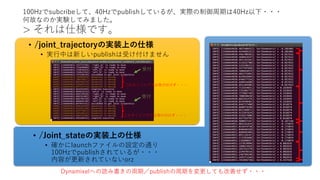
> それは仕様です。 • /joint_trajectoryの実装上の仕様 •
実行中は新しいpublishは受け付けません Dynamixelへの読み書きの周期/publishの周期を変更しても改善せず・・・ 100Hzでsubcribeして、40Hzでpublishしているが、実際の制御周期は40Hz以下・・・ 何故なのか実験してみました。 このタイミングでは受け付けず・・・ このタイミングでは受け付けず・・・ 受付 受付 • /Joint_stateの実装上の仕様 • 確かにlaunchファイルの設定の通り 100Hzでpublishされているが・・・ 内容が更新されていないorz
26.
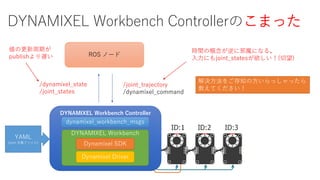
DYNAMIXEL Workbench Controllerのこまった DYNAMIXEL
Workbench Controller DYNAMIXEL Workbench Dynamixel SDK Dynamixel Driver dynamixel_workbench_msgs ROS ノード /dynamixel_state /joint_states /joint_trajectory /dynamixel_command YAML (joint 定義ファイル) 時間の概念が逆に邪魔になる。 入力にもjoint_statesが欲しい!(切望) 解決方法をご存知の方いらっしゃったら 教えてください! 値の更新周期が publishより遅い
27.
評価 (まとめ) • DYNAMIXEL
Workbench Controllerは、ティーチング・プレイバッ クなどのモーション再生動作には向いている。Move ITにも対応! • DYNAMIXEL Workbench Controllerは、たぶんリアルタイムの制御 には向いていない。 • リアルタイムで制御したい場合は、自作のROSノード、もしくはマ イコンでDynamixelを制御したほうがいいかも。 • DYNAMIXEL Workbench Controllerを二足歩行ロボットに使いたい と思わないが、勉強会の課題のロボットアームには最適と思う。
28.
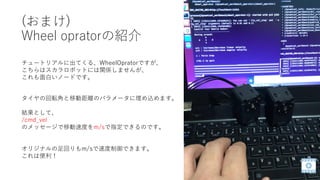
(おまけ) Wheel opratorの紹介 タイヤの回転角と移動距離のパラメータに埋め込めます。 結果として、 /cmd_vel のメッセージで移動速度をm/sで指定できるのです。 オリジナルの足回りもm/sで速度制御できます。 これは便利! チュートリアルに出てくる、WheelOpratorですが、 こちらはスカラロボットには関係しませんが、 これも面白いノードです。
Download






![joint_trajectoryとは
• JointTrajectoryPoint
• 1関節分の位置指令(角度)、速度指令(角速度)、加速度指令(角加速度)、力指
令(トルク)とスタートからの実行時間がセットになったもの
• JointTrajectory
• JointTrajectoryPointを複数関節分まとめたもの、かつその関節の名前の定義
・ジョイント名[]
・JointTrajectryPoint []
・位置[]
・速度[]
・加速度[]
・力指令[]
・スタートからの時間[]](https://image.slidesharecdn.com/20190825roslt01-190825122011/85/DYNAMIXEL-Workbench-19-320.jpg)


![Dynamixel2dynamixel
拡張時に経験した謎の制約
• Joint_trajectryの実行時間(time_from_start)を0.02secに設定
(何故か、それ以下だと動かない)
• [0] の1ポーズのみを40Hzでpublishし続ける
(何故か、それ以上の周期だと動かない)
ナンジャコリャ・・・。](https://image.slidesharecdn.com/20190825roslt01-190825122011/85/DYNAMIXEL-Workbench-23-320.jpg)












![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)













![[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision](https://cdn.slidesharecdn.com/ss_thumbnails/dlkobayashi0115-210115012308-thumbnail.jpg?width=640&height=640&fit=bounds)














