More Related Content

PDF
つながるロボット 〜分散協調ロボットの開発を加速化するROSの紹介〜 
PDF
03 第3.6節-第3.8節 ROS2の基本機能(2/2) 
PPTX
ロボットシステムのつくりかた 〜Robot Operating Systemというアプローチ〜 
PDF
02 第3.1節-第3.5節 ROS2の基本機能(1/2) ROS2勉強合宿 @別府温泉 
PDF

PPTX
リアルタイムPoint cloudデータのビジュアライゼーションについて 
PPTX
Turtlebot3とrealsenseで作るお手軽移動ロボットros japan ug #23 関西勉強会 
PDF
What's hot

PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用 
PDF
NEDO講座 MoveIt! チュートリアル 第1部 
PDF
Jetson活用セミナー ROS2自律走行実現に向けて 
PDF

PDF

PDF
ロボット・ソフトウェア開発環境ROSとは何か? (in Japanese) 
PDF

PDF
05 第4.4節-第4.8節 ROS2の応用機能(2/2) 
PDF
Cartographer を用いた 3D SLAM 
PDF
QoS for ROS 2 Dashing/Eloquent 
PDF

PDF
PFNのML/DL基盤を支えるKubernetesにおける自動化 / DevOpsDays Tokyo 2021 
PDF
ROS2勉強会@別府 第7章Pythonクライアントライブラリrclpy 
PPTX

PPTX

PDF
06 第5.1節-第5.7節 ROS2に対応したツール/パッケージ 
PDF
SLAMチュートリアル大会資料(ORB-SLAM) 
PDF

PDF

PDF
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション Similar to ROS2勉強会 4章前半

PDF

PDF
01 ROS2 実用化に関するサーベイ ROS2勉強合宿 @別府温泉 
PDF
IoT時代におけるストリームデータ処理と急成長の Apache Flink 
PDF
Twitterのリアルタイム分散処理システム「Storm」入門 
PDF
NEDO特別講座 ロボット共通プラットフォーム講習会 (1) 
PDF
【BS14】Blazor WebAssemblyとJavaScriptのインターオペラビリティ 
PPTX

PPTX
「自動化...か、かっこいいタル」(憧れ)から始める自動化 
PDF
ソーシャルウェブ と レコメンデーション -第4回データマイニング+WEB勉強会@東京 
PDF
Azure Serverless or Power Platform 〜 あなたならどっち?! - Azure Serverless 編 
PPTX
Scalatronで楽しく学ぶ関数型プログラミング 
PDF
デブサミ2014-Stormで実現するビッグデータのリアルタイム処理プラットフォーム ~ストリームデータ処理から機械学習まで~ 
PDF
ROS JAPAN Users Group Meetup 01 
PDF

PDF

PPTX
Report of OpenStack ops mid cycle meetup at Philadelphia in Mar, 2015 (In Jap... 
PPT

PPTX
SoR系 分散業務処理システムでのもろもろ考慮点(勢い版 2017.07 Recently uploaded

PDF
krsk_aws_re-growth_aws_devops_agent_20251211 
PDF
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ... 
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】 
PDF
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境 
PDF
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研 
PPTX
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx ROS2勉強会 4章前半
- 1.
- 2.
@calm0815
自己紹介
• 名前:桑野 僚大(KuwanoTomohiro)
• 所属:九州工業大学 M2 西田研究室
• 研究:ソフトロボットハンド
自動車部や学生フォーミュラの活動を経て現在に至る。
研究室メンバーに日々煽り煽られながらもROSの勉強中。
(感謝しかないですよ!!!) Twitter : @calm0815
Github : calm0815
➢ https://github.com/calm0815
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
@calm0815@calm0815
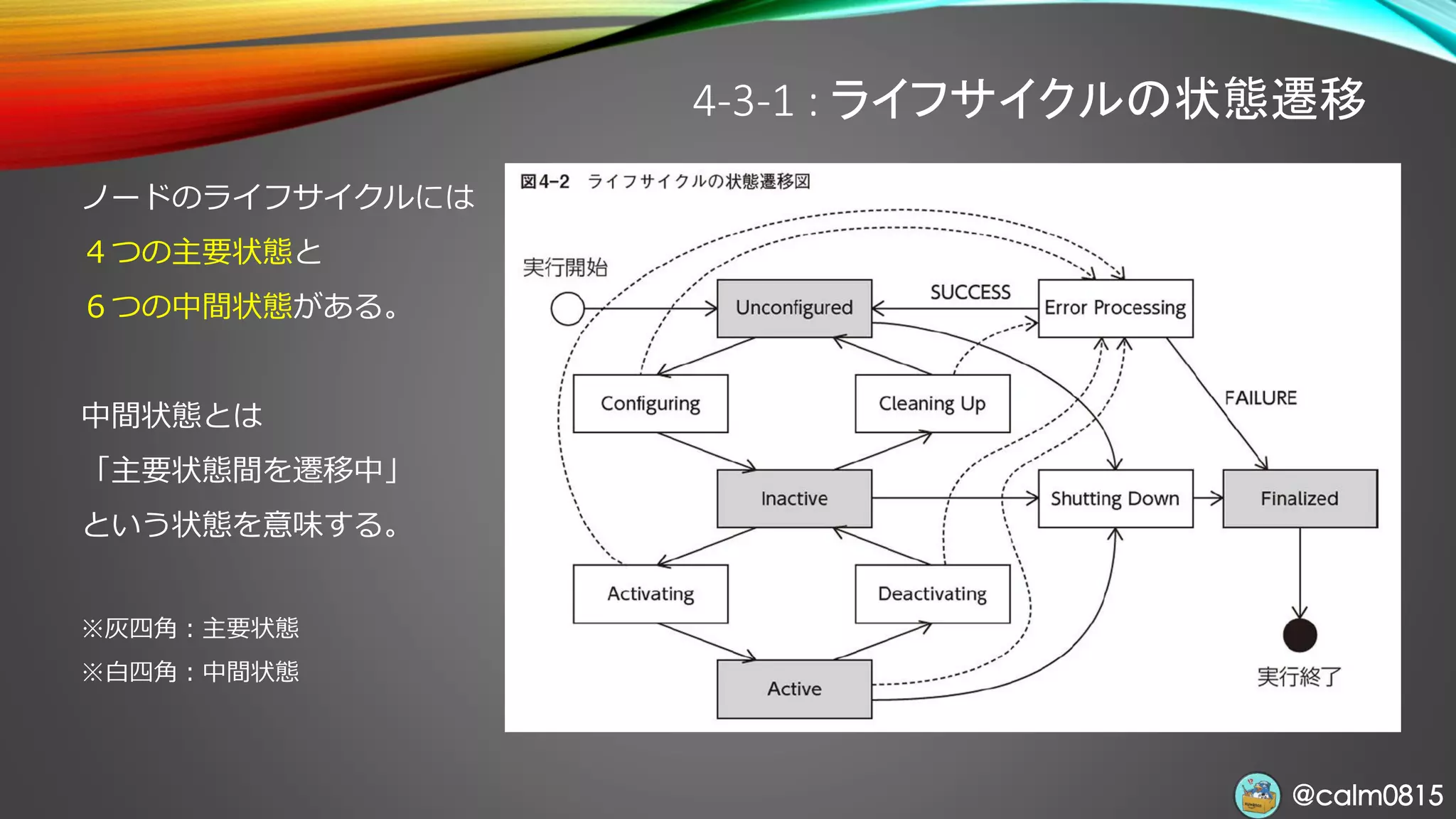
4-3-1 : ライフサイクルの状態遷移
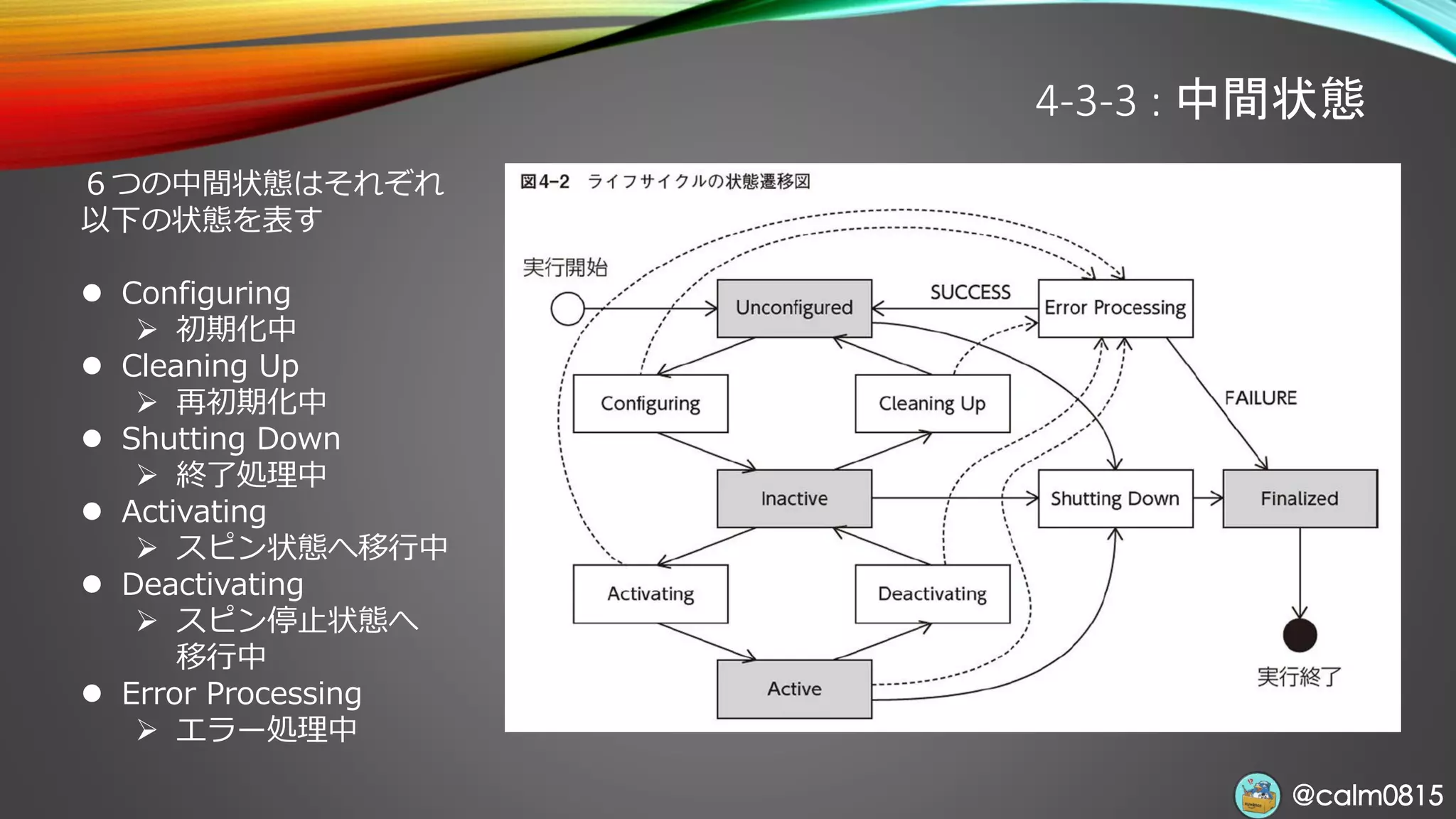
状態遷移は以下のルールで発生する。
•主要状態から中間状態を経由して矢印の先にある次の主要状態に遷移することが
できれば、状態遷移の成功。
• 状態遷移中に失敗が発生すると、矢印の逆方向のもとの主要状態に戻される。
• 失敗とは別に、エラー(補足されない例外)を検出すると、
Error Processing状態に遷移する。Error Processingに成功すると
Unconfiguredに戻り、失敗するとFinalizedに移り実行終了する。
• 主要状態の中で唯一、Active状態からのエラー検出時のみ自動で
Error Processing状態に遷移する。
- 34.
- 35.
- 36.
@calm0815@calm0815
4-3-2 : 主要状態
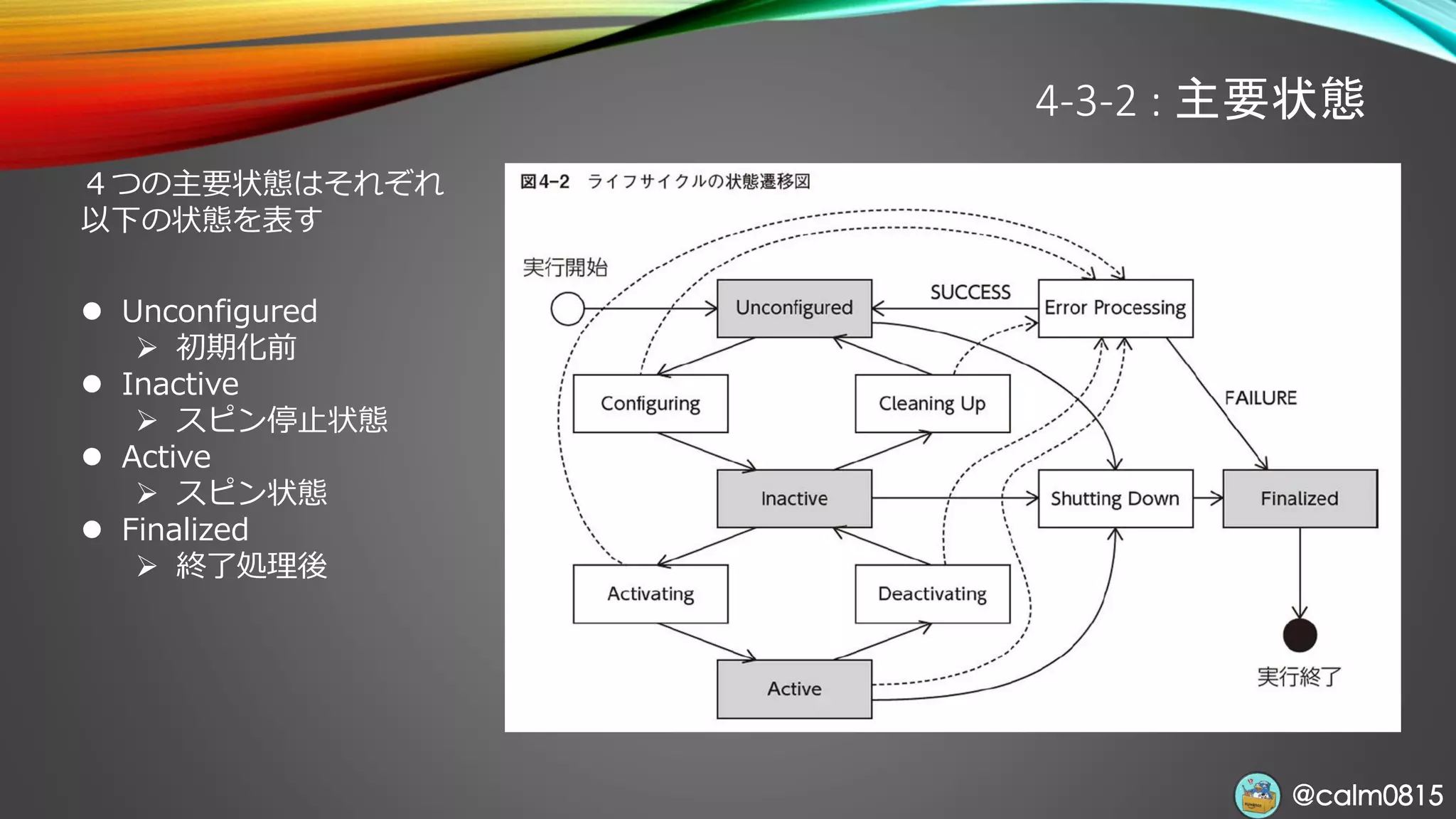
⚫Unconfigured
ノード起動後にすぐ遷移する状態。ノードの初期化が終わってない。
エラー処理後もこの状態に戻る。
⚫ Inactive
ノードが何も処理を行っていない状態。ノードのパラメータを変えたり、
トピックのPublisher/Subscriber構成を変えたりするために、ノードを
(再)Unconfigured状態にさせるために用いられる。
この状態では、トピックやサービスリクエストが届いても、読み込み、データ処理、
サービスレスポンスを行うことはできない。QoSポリシーに従い、
これらのトピックやサービスリクエストは保留される。
- 37.
@calm0815@calm0815
4-3-2 : 主要状態
⚫Active
ノードの一番メインとなる状態。
この状態では、トピックの送受信、サービスのレスポンス、データ処理が行われる。
もし、ノードもしくはシステムで解決できないエラーを検出した場合、
自動的にError Processing状態に遷移する。
⚫ Finalized
ノードが破棄される直前に遷移する状態。
この状態からは実行終了以外に、ほかの状態へ遷移することはできない。
この状態は、デバッグや自己検証のためにあり、
ノードの破棄を可視化することが可能。
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.

![@calm0815@calm0815
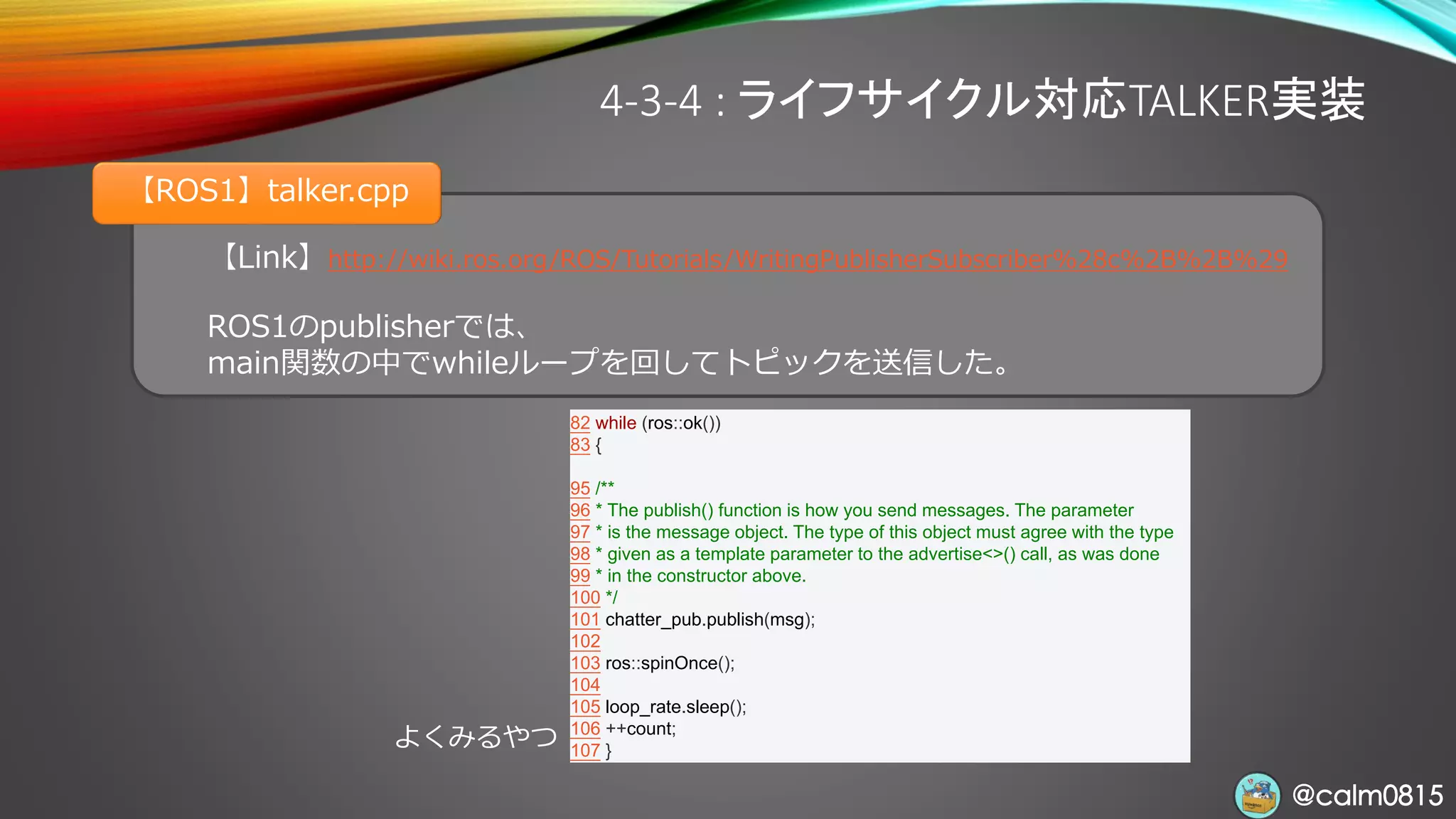
4-1 : LAUNCHシステム
ROS1の
Launchシステム
ノードの起動方法がXML形式で記述されたファイル
➢ ノードの設定
➢ パラメータ設定
➢ 名前空間やマップの設定
➢ 修了したノードの自動再起動の設定
【起動例】 $ roslaunch [package_name] launch_name.launch
Launchシステムの役割 : 複数のノードを記述された実行手順の通りに実行する
起動手順の構成に制御構文を使いたい
複数ノードの全体像を把握するのが難しい
⇒ launchファイルを複数に分割してインクルードしたい
デバッグするにはXMLの解釈器が必要であり、原因の特定が難しい
⇒ 簡単にデバッグしたい](https://image.slidesharecdn.com/ros2studydownconverted-191030102733/75/ROS2-4-5-2048.jpg)
![@calm0815@calm0815
ROS2の
Launchシステム
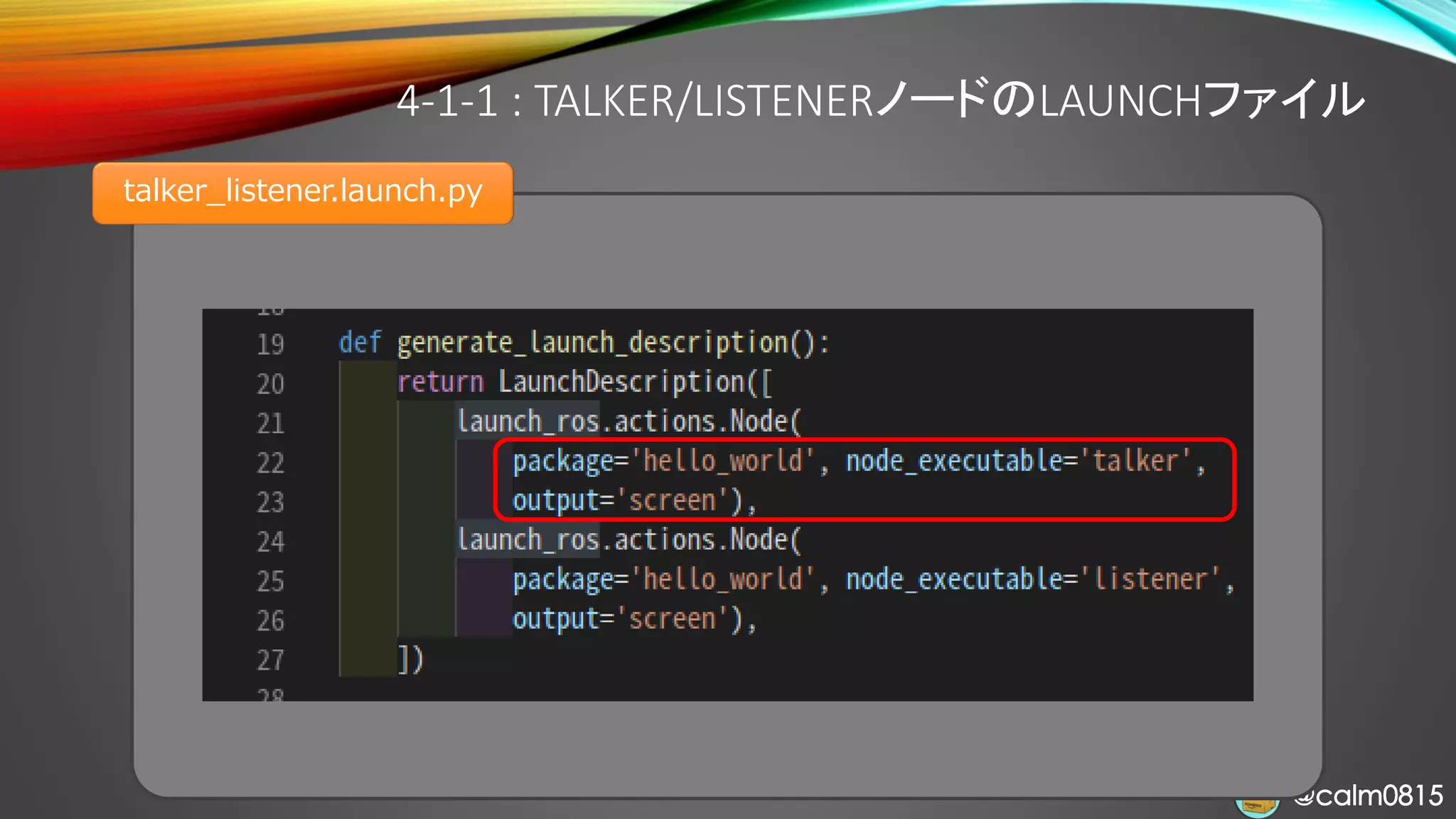
ノードの起動方法がpythonで記述されたファイル
➢ ノードの設定
➢ パラメータ設定
➢ 名前空間やマップの設定
➢ 修了したノードの自動再起動の設定
➢ 各ノードの状態を監視する機能
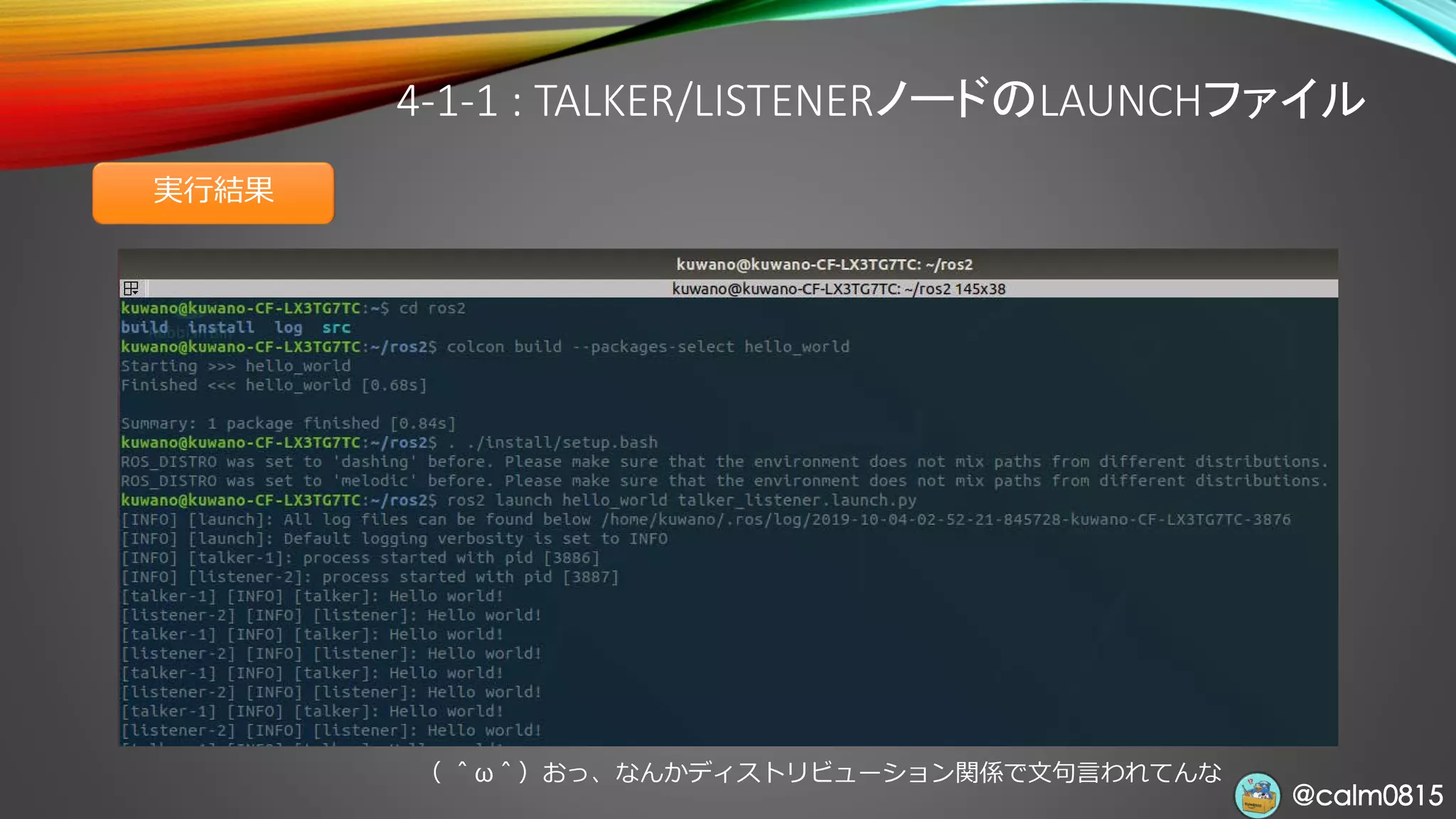
【起動例】 $ ros2 launch [package_name] launch_name.launch.py※黄色字は変更点
4-1 : LAUNCHシステム
Launchシステムにプログラミング言語のpythonを採用することで
ROS1で抱えていた問題を解決
※ROS1からの移植性を考慮して、XML記法やYAML記法も導入される予定](https://image.slidesharecdn.com/ros2studydownconverted-191030102733/75/ROS2-4-6-2048.jpg)