Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
ROBOTIS Japan
6,835 views
OpenCM IDE、OpenCM 485 EXPを用いてのDynamixel Xシリーズの制御
当ドキュメントは、OpenCM IDE、OpenCM 485 EXPを用いてのDynamixel Xシリーズの制御について記載してります。 また、いくつかのサンプルコードとその解説が記載してあります。
Technology
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 33
2
/ 33
3
/ 33
4
/ 33
5
/ 33
6
/ 33
7
/ 33
8
/ 33
9
/ 33
10
/ 33
11
/ 33
12
/ 33
13
/ 33
14
/ 33
15
/ 33
16
/ 33
17
/ 33
18
/ 33
19
/ 33
20
/ 33
21
/ 33
22
/ 33
23
/ 33
24
/ 33
25
/ 33
26
/ 33
27
/ 33
28
/ 33
29
/ 33
30
/ 33
31
/ 33
32
/ 33
33
/ 33
More Related Content
PDF
[DL輪読会]Weakly-Supervised Disentanglement Without Compromises
by
Deep Learning JP
PDF
[DLHacks]XLNet を動かして可視化してみた
by
Deep Learning JP
PDF
本当にわかる Spectre と Meltdown
by
Hirotaka Kawata
PPT
大学3年生の僕に伝えたいことをつらつらと
by
Toshinori Sato
PDF
Zynq mp勉強会資料
by
一路 川染
PDF
MoveItの新機能、 pilz industrial motion を試してみた
by
Ryo Kabutan
PDF
helloSystemをインストール
by
Ryo ONODERA
PPTX
仮想脳「NeuroAI」の裏側 & 企画発表(NTTデータ テクノロジーカンファレンス 2020 発表資料)
by
NTT DATA Technology & Innovation
[DL輪読会]Weakly-Supervised Disentanglement Without Compromises
by
Deep Learning JP
[DLHacks]XLNet を動かして可視化してみた
by
Deep Learning JP
本当にわかる Spectre と Meltdown
by
Hirotaka Kawata
大学3年生の僕に伝えたいことをつらつらと
by
Toshinori Sato
Zynq mp勉強会資料
by
一路 川染
MoveItの新機能、 pilz industrial motion を試してみた
by
Ryo Kabutan
helloSystemをインストール
by
Ryo ONODERA
仮想脳「NeuroAI」の裏側 & 企画発表(NTTデータ テクノロジーカンファレンス 2020 発表資料)
by
NTT DATA Technology & Innovation
What's hot
PDF
はじめての機械学習
by
Taiji Suzuki
PPTX
Intoduction to Homotopy Type Therory
by
Jack Fox
PPTX
falls and drop attacks in neurology.pptx
by
NehaYadav371751
PDF
『自由エネルギー原理入門』勉強会1章&2章前半
by
大地 紺野
PDF
coordinate descent 法について
by
京都大学大学院情報学研究科数理工学専攻
PPTX
Principles of polarity in eeg
by
Pramod Krishnan
PDF
[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models
by
Deep Learning JP
PDF
2015年度GPGPU実践基礎工学 第13回 GPUのメモリ階層
by
智啓 出川
PDF
RSA鍵生成脆弱性ROCAの紹介
by
MITSUNARI Shigeo
PDF
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
PDF
はじめてのKrylov部分空間法
by
tmaehara
PDF
Non-autoregressive text generation
by
nlab_utokyo
PPTX
[DL輪読会]Meta Reinforcement Learning
by
Deep Learning JP
PDF
FeUdal Networks for Hierarchical Reinforcement Learning
by
佑 甲野
はじめての機械学習
by
Taiji Suzuki
Intoduction to Homotopy Type Therory
by
Jack Fox
falls and drop attacks in neurology.pptx
by
NehaYadav371751
『自由エネルギー原理入門』勉強会1章&2章前半
by
大地 紺野
coordinate descent 法について
by
京都大学大学院情報学研究科数理工学専攻
Principles of polarity in eeg
by
Pramod Krishnan
[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models
by
Deep Learning JP
2015年度GPGPU実践基礎工学 第13回 GPUのメモリ階層
by
智啓 出川
RSA鍵生成脆弱性ROCAの紹介
by
MITSUNARI Shigeo
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
はじめてのKrylov部分空間法
by
tmaehara
Non-autoregressive text generation
by
nlab_utokyo
[DL輪読会]Meta Reinforcement Learning
by
Deep Learning JP
FeUdal Networks for Hierarchical Reinforcement Learning
by
佑 甲野
Similar to OpenCM IDE、OpenCM 485 EXPを用いてのDynamixel Xシリーズの制御
PDF
Bluetooth通信の 仕組みと活用法紹介
by
Takehiko YOSHIDA
PPTX
Arduino 入門
by
mitunaga
PDF
Arduinoでプログラミングに触れてみよう 続編
by
Hiromu Yakura
PDF
マイコンロボット実習
by
Takehiko YOSHIDA
PDF
Python physicalcomputing
by
Noboru Irieda
PDF
coma Study Room vol.2 Arduino Workshop
by
Eto Haruhiko
PDF
【学習メモ#4th】12ステップで作る組込みOS自作入門
by
sandai
PDF
ものづくりプロジェクトII 一日でわかるArduino入門
by
Yoichi Yamazaki
PDF
SFC デザイン言語WS(電子工作)第3回「電子工作の作法」
by
Makoto Hirahara
PDF
4bit-CPU : TD4の解説
by
Seong-Hun Choe
PDF
NXT走行体サンプルプログラム(ETロボコン向けTOPPERS活用セミナー3)
by
Takuya Azumi
PDF
3台以上のarduinoでのspi通信 2017 07-20
by
first name chibaf
KEY
DE0でラジコンカー作ってみた 関西de0 fpga勉強会20120519
by
Yasuhiro Ishii
PPTX
Androidとfpgaを高速fifo通信させちゃう
by
ksk sue
PPT
平成26年度熊本高専Arduino講座 第1週 センサーとArduno及びProcessingとの連携
by
Katsuhiro Morishita
PPTX
Kiso sekkei 01rev03
by
tetsuya matsuno
PDF
Dp tf stm32_cubemx0418j
by
hideyukiaraki
PDF
衛星芸術Pbl 2011 10_18
by
Koichiro Mori
PDF
女子美術大学メディアアート演習ⅡB 2012 Fall 第2回 2/2
by
Satoru Tokuhisa
PDF
2017年01月21日 AITCシニア技術者勉強会 第3回「各種センサーを使ってみよう!~温湿度と加速度~」
by
aitc_jp
Bluetooth通信の 仕組みと活用法紹介
by
Takehiko YOSHIDA
Arduino 入門
by
mitunaga
Arduinoでプログラミングに触れてみよう 続編
by
Hiromu Yakura
マイコンロボット実習
by
Takehiko YOSHIDA
Python physicalcomputing
by
Noboru Irieda
coma Study Room vol.2 Arduino Workshop
by
Eto Haruhiko
【学習メモ#4th】12ステップで作る組込みOS自作入門
by
sandai
ものづくりプロジェクトII 一日でわかるArduino入門
by
Yoichi Yamazaki
SFC デザイン言語WS(電子工作)第3回「電子工作の作法」
by
Makoto Hirahara
4bit-CPU : TD4の解説
by
Seong-Hun Choe
NXT走行体サンプルプログラム(ETロボコン向けTOPPERS活用セミナー3)
by
Takuya Azumi
3台以上のarduinoでのspi通信 2017 07-20
by
first name chibaf
DE0でラジコンカー作ってみた 関西de0 fpga勉強会20120519
by
Yasuhiro Ishii
Androidとfpgaを高速fifo通信させちゃう
by
ksk sue
平成26年度熊本高専Arduino講座 第1週 センサーとArduno及びProcessingとの連携
by
Katsuhiro Morishita
Kiso sekkei 01rev03
by
tetsuya matsuno
Dp tf stm32_cubemx0418j
by
hideyukiaraki
衛星芸術Pbl 2011 10_18
by
Koichiro Mori
女子美術大学メディアアート演習ⅡB 2012 Fall 第2回 2/2
by
Satoru Tokuhisa
2017年01月21日 AITCシニア技術者勉強会 第3回「各種センサーを使ってみよう!~温湿度と加速度~」
by
aitc_jp
More from ROBOTIS Japan
PDF
TurtleBot3でROSを始めよう
by
ROBOTIS Japan
PPTX
3次元SLAMは誰でもできるよ。そう、TX2とTurtleBot3ならね。
by
ROBOTIS Japan
PDF
Open manipulator x-assembly_guide_ver1913
by
ROBOTIS Japan
PDF
「Turtlebot3の紹介」 ROS Japan UG #10 勉強会
by
ROBOTIS Japan
PDF
Brochure TurtleBot3(A4)
by
ROBOTIS Japan
PDF
Turtlebot3 friends:tank_setup
by
ROBOTIS Japan
PDF
Manipulator X 4DOF パンフレット
by
ROBOTIS Japan
PDF
Brochure HN12-I101 set
by
ROBOTIS Japan
PDF
Brochure HN13-101 set
by
ROBOTIS Japan
PDF
DYNAMIXEL XWシリーズ パンフレット
by
ROBOTIS Japan
TurtleBot3でROSを始めよう
by
ROBOTIS Japan
3次元SLAMは誰でもできるよ。そう、TX2とTurtleBot3ならね。
by
ROBOTIS Japan
Open manipulator x-assembly_guide_ver1913
by
ROBOTIS Japan
「Turtlebot3の紹介」 ROS Japan UG #10 勉強会
by
ROBOTIS Japan
Brochure TurtleBot3(A4)
by
ROBOTIS Japan
Turtlebot3 friends:tank_setup
by
ROBOTIS Japan
Manipulator X 4DOF パンフレット
by
ROBOTIS Japan
Brochure HN12-I101 set
by
ROBOTIS Japan
Brochure HN13-101 set
by
ROBOTIS Japan
DYNAMIXEL XWシリーズ パンフレット
by
ROBOTIS Japan
Recently uploaded
PPTX
ddevについて .
by
iPride Co., Ltd.
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PDF
さくらインターネットの今 法林リージョン:さくらのAIとか GPUとかイベントとか 〜2026年もバク進します!〜
by
法林浩之
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PDF
Drupal Recipes 解説 .
by
iPride Co., Ltd.
ddevについて .
by
iPride Co., Ltd.
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
さくらインターネットの今 法林リージョン:さくらのAIとか GPUとかイベントとか 〜2026年もバク進します!〜
by
法林浩之
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
Drupal Recipes 解説 .
by
iPride Co., Ltd.
OpenCM IDE、OpenCM 485 EXPを用いてのDynamixel Xシリーズの制御
1.
OpenCM IDE、OpenCM 485
EXP を用いての Dynamixel Xシリーズ の制御 1
2.
1. 前提条件 3 2.
XL430-W250の設定について 4 3. Master/Slaveサンプルコードの説明 8 4. 同期制御サンプルコードの説明 17 5. TeraTermについて 23 6. シリアル通信サンプルコードの説明 25 2
3.
1. 前提条件 環境が設定済みであれば、実施する必要はない。 未設定の場合は、下記の項目のリンクに従って設定を行う。 1.1. OpenCM
IDE インストール、ドライバの設定が完了していること。 URL:OpenCM IDE - ROBOTIS e-MANUAL 1.2. OpenCM9.04 初期設定が完了していること。 URL:OpenCM9.04 - ROBOTIS e-MANUAL URL:Testing the Controller Control Table 1.3. OpenCM 485 EXPの接続 OpenCM9.04と、上記のボートと接続済みであること。 URL:OpenCM 485 EXP - ROBOTIS e-MANUAL 1.4. Dnamixel XL430-W250シリーズを使用していること。 URL:XL430-W250 - ROBOTIS e-MANUAL 3
4.
2. XL430-W250の設定について サンプルコードを動作させるための設定を確認する。 2.1 確認手順 以下のようにU2D2、PC、Dynamixelを接続し設定が所望な値となっているかを確認す る。 R+
Maneger 2.0を起動し、 画面に従い設定を確認する。 DYNAMIXEL Xを選択する。 4
5.
Update & Testを選択する Nextを選択する。 5
6.
Nextを選択する。 Nextを選択する。 6
7.
Nextを選択する。 3つのXL430-W250の以下の項目の設定を確認する。 1. 7 -
ID → 1~3がそれぞれ割あたっていること。 2. 8 - Baud Rate(Bus) → 3(1Mbps)に設定されていること。 3. 11 - Operating Mode → 3(Position Control)に設定されていること。 4. 13 - ProtocolVersion → 2(Protocol 2.0)に設定されていること。 7
8.
3. Master/Slaveサンプルコードの説明 Master/Slaveを用いてDynamixelの制御を行う。 <動作概要> ・Button1が押されたらMaster/Slaveを入れ替える。 ・MasterはLEDが点灯し、SlaveはLEDが消灯する。 ・MasterのGoal PositionをSlaveのGoal
Positionへ設定する。 ・シリアルモニタにID 1、ID 2のGoal Positionを表示する。 以下、サンプルコード。 /* Dynamixel ID defines */ #define ID_NUM_1 1 #define ID_NUM_2 2 #define GLOBAL_ID 254 /* Serial Device Defines for Dynamixel bus */ #define DXL_BUS_SERIAL1 1 //Dynamixel on Serial1(USART1) <-OpenCM9.04 #define DXL_BUS_SERIAL2 2 //Dynamixel on Serial2(USART2) <-LN101,BT210 #define DXL_BUS_SERIAL3 3 //Dynamixel on Serial3(USART3) <-OpenCM 485EXP /* Dynamixel Address Defines */ #define DXL_TRQ 64 #define DXL_LED 65 #define DXL_GOAL_POS 116 /* OpenCM 485 EXP Defines */ #define BUTTON_1 16 /* Defines for parameter */ #define OFF 0 #define ON 1 #define PUSH_CNT 100 #define DXL_BAUD_RATE 3 // Dynamixel 2.0 Baudrate -> 0: 9600, 1: 57600, 2: 115200, 3: 1Mbps 8
9.
/* Global Variables
*/ Dynamixel Dxl(DXL_BUS_SERIAL3); boolmasterMode = true; /* setup */ voidsetup() { delay(5000); // Wait DXL boot Dxl.begin(DXL_BAUD_RATE); // Set Baud Rate 56700 pinMode(BUTTON_1, INPUT_PULLDOWN); // Button1 enable } /* main loop */ voidloop() { unsignedlonggoalPos[2]; unsignedlongpushCnt = 0; // Get Button State while(digitalRead(BUTTON_1)) { pushCnt++; } // Chattering control if( pushCnt > PUSH_CNT ){ masterMode = !masterMode; } // Get GoalPos goalPos[0] = Dxl.readDword(ID_NUM_1,DXL_GOAL_POS); goalPos[1] = Dxl.readDword(ID_NUM_2,DXL_GOAL_POS); //Output SerialUSB SerialUSB.print("GOAL_POS ID1: "); SerialUSB.println(goalPos[0]); SerialUSB.print("GOAL_POS ID2: "); SerialUSB.println(goalPos[1]); 9
10.
// Switch to
MASTER/SLAVE if(masterMode) { Dxl.writeByte(ID_NUM_1, DXL_LED, ON); // ID1 LED ON Dxl.writeByte(ID_NUM_2, DXL_LED, OFF); // ID2 LED OFF Dxl.writeByte(ID_NUM_1, DXL_TRQ, OFF); // ID1 Trq OFF Dxl.writeByte(ID_NUM_2, DXL_TRQ, ON); // ID2 Trq ON Dxl.writeDword(ID_NUM_2,DXL_GOAL_POS, goalPos[0] ); // Set ID1 GoalPos } else{ Dxl.writeByte(ID_NUM_1, DXL_LED, OFF); // ID1 LED OFF Dxl.writeByte(ID_NUM_2, DXL_LED, ON); // ID2 LED ON Dxl.writeByte(ID_NUM_1, DXL_TRQ, ON); // ID1 Trq ON Dxl.writeByte(ID_NUM_2, DXL_TRQ, OFF); // ID2 Trq OFF Dxl.writeDword(ID_NUM_1,DXL_GOAL_POS, goalPos[1] ); // Set ID2 GoalPos } delay(10); // 10[ms] } 10
11.
3.1. 値の定義について サンプルコードで使用している定義に関しての説明を記載する。 /* Dynamixel
ID defines */ #define ID_NUM_1 1 #define ID_NUM_2 2 #define GLOBAL_ID 254 ID_NUM_1 1、ID_NUM_2は、各XL430-W250に割り当てられているID。 IDの重複が起きないように設定する。 GLOBAL_IDは、全てのXL430-W250にアクセスできるID。 /* Serial Device Defines for Dynamixel bus */ #define DXL_BUS_SERIAL1 1 //Dynamixel on Serial1(USART1) <-OpenCM9.04 #define DXL_BUS_SERIAL2 2 //Dynamixel on Serial2(USART2) <-LN101,BT210 #define DXL_BUS_SERIAL3 3 //Dynamixel on Serial3(USART3) <-OpenCM 485EXP XL430-W250とOpenCM9.04間で使用するシリアルの設定。 本ケースでは、OpenCM 485 EXPを使用するので、DXL_BUS_SERIAL3を使用する。 /* Dynamixel Address Defines */ #define DXL_TRQ 64 #define DXL_LED 65 #define DXL_GOAL_POS 116 Dynamixelには、ROM/RAMの領域が用意されており、各アドレスにアクセスして制御を行 う。ROM領域は、トルクが無効(‘0’)の場合に書き換えが可能で、トルクが有効(‘1’)の場合 は、書き込みがロックされる。 ここでは、今回使用するアドレスをピックアップして定義しておく。 アドレスの詳細は、以下の表を参照。 ※Control Tableの値や位置は、機種ごとに異なるため確認が必要。 11
12.
表1 XL430-W250 Control
Table Area Address Size [byte] Data Name Description Access initial Value RAM 64 1 Torque Enable Motor Torque On/Off RW 0 65 1 LED Status LED On/Off RW 0 ... ... ... ... ... ... 112 4 Profile Velocity Velocity Value of Profile RW 0 116 4 Goal Position Target Position Value RW - /* OpenCM 485 EXP Defines */ #define BUTTON_1 16 BUTTON_1は、OpenCM 485 EXP のタクトスイッチ(Button1)のアドレス。 その他にも、以下のスイッチやLEDが使用可能。 図1 OpenCM 485 EXP LED、Button配置 12
13.
表2 OpenCM 485
EXP アドレス配置 Name OpenCM9.04 I/O Button1 16 Button2 17 LED1 18 LED2 19 LED3 20 /* Defines for parameter */ #define OFF 0 #define ON 1 #define PUSH_CNT 100 #define DXL_BAUD_RATE 3 // Dynamixel 2.0 Baudrate -> 0: 9600, 1: 57600, 2: 115200, 3: 1Mbps コード上で使用する数値を理解しやすいように、予め定義しておく。 DXL_BAUD_RATEでは、DyanamixelのBaudrateを設定する。 本ケースでは、1Mbpsの3を設定する。 13
14.
3.2. コードの動作について サンプルコードの動作について記載する。 /* setup
*/ voidsetup() { delay(5000); // Wait DXL boot Dxl.begin(DXL_BAUD_RATE); // Set Baud Rate 1Mbps pinMode(BUTTON_1, INPUT_PULLDOWN); // Button1 enable } setup()では、Dynamixelがブートするまでの待機時間、BaudRateの設定、OpenCM 485 EXPのButton1を有効にするための設定をそれぞれ行っている。 // Get Button State while(digitalRead(BUTTON_1)) { pushCnt++; } // Chattering control if( pushCnt > PUSH_CNT ){ masterMode = !masterMode; } タクトスイッチでMaster/Slaveを切り替える。 チャタリングでの誤動作を防止するために、ある程度ボタンが押されたらMaster/Slaveを入 れ替える。 // Get GoalPos goalPos[0] = Dxl.readDword(ID_NUM_1,DXL_GOAL_POS); goalPos[1] = Dxl.readDword(ID_NUM_2,DXL_GOAL_POS); //Output SerialUSB SerialUSB.print("GOAL_POS ID1: "); SerialUSB.print(goalPos[0]); SerialUSB.print(" GOAL_POS ID2: "); SerialUSB.println(goalPos[1]); 14
15.
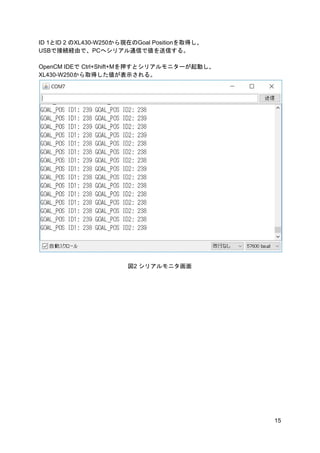
ID 1とID 2
のXL430-W250から現在のGoal Positionを取得し、 USBで接続経由で、PCへシリアル通信で値を送信する。 OpenCM IDEで Ctrl+Shift+Mを押すとシリアルモニターが起動し、 XL430-W250から取得した値が表示される。 図2 シリアルモニタ画面 15
16.
// Switch to
MASTER/SLAVE if(masterMode) { Dxl.writeByte(ID_NUM_1, DXL_LED, ON); // ID1 LED ON Dxl.writeByte(ID_NUM_2, DXL_LED, OFF); // ID2 LED OFF Dxl.writeByte(ID_NUM_1, DXL_TRQ, OFF); // ID1 Trq OFF Dxl.writeByte(ID_NUM_2, DXL_TRQ, ON); // ID2 Trq ON Dxl.writeDword(ID_NUM_2,DXL_GOAL_POS, goalPos[0] ); // Set ID1 GoalPos } else{ Dxl.writeByte(ID_NUM_1, DXL_LED, OFF); // ID1 LED OFF Dxl.writeByte(ID_NUM_2, DXL_LED, ON); // ID2 LED ON Dxl.writeByte(ID_NUM_1, DXL_TRQ, ON); // ID1 Trq ON Dxl.writeByte(ID_NUM_2, DXL_TRQ, OFF); // ID2 Trq OFF Dxl.writeDword(ID_NUM_1,DXL_GOAL_POS, goalPos[1] ); // Set ID2 GoalPos } タクトスイッチが押されると、masterModeが切り替わる。 Dxl.writeByte(ID_NUM_1, DXL_LED, ON)では、ID 1のLEDを点灯に設定している。 Dxl.writeByte(ID_NUM_1, DXL_TRQ, ON)では、ID 1のMotor TorqueをONに設定してい る。 ※TorqueをONに設定すると、ROM領域の書き込みがロックされる。 Dxl.writeDword(ID_NUM_1,DXL_GOAL_POS, goalPos[1] )では、ID 1のGoal Positionに ID 2のGoal Positionを設定している。 また、writeByteは1Byteの書き込みで、writeDwordは4Byteの書き込みである。 使用する関数は、前記してある”表1 XL430-W250 Control Table“のsize[byte]に応じて使い分 ける必要がある。 ※sizeが2Byteの場合は、writeWordを使用する。 16
17.
4. 同期制御サンプルコードの説明 SyncWriteメソッドを用いてDynamixelの同期制御を行う。 <動作概要> ・ID1~3のXL430-W250を同期させて動作させる。 ・ID1,3は同じ向きに動作。ID 2は逆側に動作する。 以下、サンプルコード。 /*
Dynamixel ID defines */ #define DXL_ID_1 1 #define DXL_ID_2 2 #define DXL_ID_3 3 /* Dynamixel Address Defines */ #define DXL_TRQ 64 #define DXL_LED 65 #define DXL_PROFILE_VELOCITY 112 #define DXL_GOAL_POS 116 /* Serial Device Defines for Dynamixel bus */ #define DXL_BUS_SERIAL1 1 //Dynamixel on Serial1(USART1) <-OpenCM9.04 #define DXL_BUS_SERIAL2 2 //Dynamixel on Serial2(USART2) <-LN101,BT210 #define DXL_BUS_SERIAL3 3 //Dynamixel on Serial3(USART3) <-OpenCM 485EXP /* Parameter Defines */ #define OFF 0 #define ON 1 #define DXL_BAUD_RATE 3 // Dynamixel 2.0 Baudrate -> 0: 9600, 1: 57600, 2: 115200, 3: 1Mbps #define PACKET_LEN 9 #define NUM_OF_DATA 2 #define DXL_NUM 3 /* Global Variables */ Dynamixel Dxl(DXL_BUS_SERIAL3); byte dxlId[DXL_NUM] = { DXL_ID_1, DXL_ID_2, DXL_ID_3 17
18.
}; word SyncVelocity1[PACKET_LEN] = { //ID
,Profile Velocity DXL_ID_1, 100, 0, DXL_ID_2, 100, 0, DXL_ID_3, 100, 0 }; word SyncVelocity2[PACKET_LEN] = { //ID ,Profile Velocity DXL_ID_1, 200, 0, DXL_ID_2, 200, 0, DXL_ID_3, 200, 0 }; word SyncGoalPos1[PACKET_LEN] = { //ID ,Goal Position DXL_ID_1, 1024, 0, DXL_ID_2, 1024, 0, DXL_ID_3, 1024, 0 }; word SyncGoalPos2[PACKET_LEN] = { //ID ,Goal Position DXL_ID_1, 0, 0, DXL_ID_2, 2048, 0, DXL_ID_3, 2048, 0 }; /* setup */ voidsetup() { delay(5000); // Wait DXL boot Dxl.begin(DXL_BAUD_RATE); // Set Baud Rate 1Mbps for(intcnt = 0; cnt < DXL_NUM; cnt++) { Dxl.jointMode(dxlId[cnt]); // Set Dynamixel ID Dxl.writeByte(dxlId[cnt], DXL_TRQ, ON); // Set Trq on 18
19.
} } /* main loop
*/ voidloop() { // Sync write Dxl.syncWrite(DXL_PROFILE_VELOCITY, NUM_OF_DATA, SyncVelocity1, PACKET_LEN); Dxl.syncWrite(DXL_GOAL_POS, NUM_OF_DATA, SyncGoalPos1, PACKET_LEN); delay(1000); // 1000[ms] // Sync write Dxl.syncWrite(DXL_PROFILE_VELOCITY, NUM_OF_DATA, SyncVelocity2, PACKET_LEN); Dxl.syncWrite(DXL_GOAL_POS, NUM_OF_DATA, SyncGoalPos2, PACKET_LEN); delay(1000); // 1000[ms] } 19
20.
4.1. 値の定義について サンプルコードで使用している定義に関しての説明を記載する。 /* Dynamixel
ID defines */ #define DXL_ID_1 1 #define DXL_ID_2 2 #define DXL_ID_3 3 DXL_ID_1 、DXL_ID_2、DXL_ID_3は、各XL430-W250に割り当てられているID。 /* Dynamixel Address Defines */ #define DXL_TRQ 64 #define DXL_LED 65 #define DXL_PROFILE_VELOCITY 112 #define DXL_GOAL_POS 116 使用するアドレスを予め定義しておく。 アドレスの詳細は、”表1 XL430-W250 Control Table”を参照。 /* Serial Device Defines for Dynamixel bus */ #define DXL_BUS_SERIAL1 1 //Dynamixel on Serial1(USART1) <-OpenCM9.04 #define DXL_BUS_SERIAL2 2 //Dynamixel on Serial2(USART2) <-LN101,BT210 #define DXL_BUS_SERIAL3 3 //Dynamixel on Serial3(USART3) <-OpenCM 485EXP XL430-W250とOpenCM9.04間で使用するシリアルの設定。 本ケースでは、OpenCM 485 EXPを使用するので、DXL_BUS_SERIAL3を使用する。 20
21.
/* Parameter Defines
*/ #define OFF 0 #define ON 1 #define DXL_BAUD_RATE 3 // Dynamixel 2.0 Baudrate -> 0: 9600, 1: 57600, 2: 115200, 3: 1Mbps #define PACKET_LEN 9 #define NUM_OF_DATA 2 #define DXL_NUM 3 コード上で使用する数値を理解しやすいように、予め定義しておく。 DXL_BAUD_RATEでは、DyanamixelのBaudrateを設定する。 本ケースでは、1Mbpsの3を設定する。 PACKET_LEN では、送信する全てのデータ数を設定する。 本ケースでは、ID1~3とProfile VelocityorGoal Positionの合わせた9になる。 NUM_OF_DATA では、1つのIDに対して送信するデータ数を設定する。 本ケースでは、DXL_IDとProfile VelocityorGoal Positionの2となる。 DXL_NUMでは、使用するDynamixelの数を設定する。 21
22.
4.2. コードの動作について サンプルコードの動作について記載する。 /* setup
*/ voidsetup() { delay(5000); // Wait DXL boot Dxl.begin(DXL_BAUD_RATE); // Set Baud Rate 1Mbps for(intcnt = 0; cnt < DXL_NUM; cnt++) { Dxl.jointMode(dxlId[cnt]); // Set Dynamixel ID Dxl.writeByte(dxlId[cnt], DXL_TRQ, ON); // Set Trq on } } setup()では、Baudrateの設定、Jointモードの設定、トルクを有効にするための設定をそれ ぞれ行っている。 /* main loop */ voidloop() { // Sync write Dxl.syncWrite(DXL_PROFILE_VELOCITY, NUM_OF_DATA, SyncVelocity1, PACKET_LEN); Dxl.syncWrite(DXL_GOAL_POS, NUM_OF_DATA, SyncGoalPos1, PACKET_LEN); delay(1000); // 1000[ms] // Sync write Dxl.syncWrite(DXL_PROFILE_VELOCITY, NUM_OF_DATA, SyncVelocity2, PACKET_LEN); Dxl.syncWrite(DXL_GOAL_POS, NUM_OF_DATA, SyncGoalPos2, PACKET_LEN); delay(1000); // 1000[ms] } メインの処理では、先にVelocityを設定し、Goal Positionを設定した契機で動作する。 Dynamixelでは、目標角度と速度を設定し簡単にモータの制御を行う事ができる。 22
23.
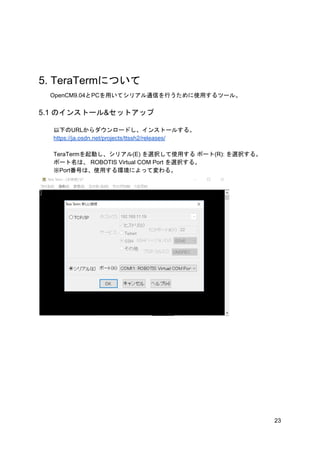
5. TeraTermについて OpenCM9.04とPCを用いてシリアル通信を行うために使用するツール。 5.1 のインストール&セットアップ 以下のURLからダウンロードし、インストールする。 https://ja.osdn.net/projects/ttssh2/releases/ TeraTermを起動し、シリアル(E)
を選択して使用する ポート(R): を選択する。 ポート名は、 ROBOTIS Virtual COM Port を選択する。 ※Port番号は、使用する環境によって変わる。 23
24.
OpenCM9.04と接続された後に、シリアルポートの設定を行う。 タブの 設定(s) →
シリアルポート(E).... を選択すると以下の画面が開くので、 スピードを9600→57600へ変更する。 24
25.
6. シリアル通信サンプルコードの説明 OpneCM9.04のUARTを使用して、PCとシリアル通信を行いDynamixelを制御する。 PC上では、TeraTermを用いしてコマンドのやり取りを行う。 ※今回は、LN-101ではなくU2D2を使用して接続する。 <動作概要> ・wを押すと、Goal positionを+100する。 ・sを押すと、Goal
positionを-100する。 ・Enterを押すと、設定した値でGoal Positionへ移動する。 以下、サンプルコード。 /* Dynamixel ID defines */ #define DXL_ID_1 1 /* Dynamixel Address Defines */ #define DXL_TRQ 64 #define DXL_PROFILE_VELOCITY 112 #define DXL_GOAL_POS 116 /* Serial Device Defines for Dynamixel bus */ #define DXL_BUS_SERIAL1 1 //Dynamixel on Serial1(USART1) <-OpenCM9.04 #define DXL_BUS_SERIAL2 2 //Dynamixel on Serial2(USART2) <-LN101,BT210 #define DXL_BUS_SERIAL3 3 //Dynamixel on Serial3(USART3) <-OpenCM 485EXP #define DXL_BAUD_RATE 3 // Dynamixel 2.0 Baudrate -> 0: 9600, 1: 57600, 2: 115200, 3: 1Mbps #define DXL_UART_BAUD_RATE 57600 25
26.
/* Parameter Defines
*/ #define DXL_POS_MIN 0 #define DXL_POS_MAX 4095 #define DXL_POS_DEFAULT 0 #define DXL_VELOCITY_SPEED 200 #define POS_PARAM 100 #define ON 1 #define OFF 0 /* Global Variables */ Dynamixel Dxl(DXL_BUS_SERIAL3); intpos = DXL_POS_DEFAULT; voidsetup(){ // セットアップ待ち delay(1000); // UARTの初期化 Serial2.begin(DXL_UART_BAUD_RATE); // UARTの割り込み設定 Serial2.attachInterrupt(serialInterrupt); // Dynamixelの設定 Dxl.begin(DXL_BAUD_RATE); Dxl.jointMode(DXL_ID_1); Dxl.writeByte(DXL_ID_1, DXL_TRQ, ON); Dxl.writeDword(DXL_ID_1, DXL_PROFILE_VELOCITY, DXL_VELOCITY_SPEED); // コマンドの説明 Serial2.println("----push key----"); Serial2.print("w : +"); Serial2.println(POS_PARAM); Serial2.print("s : -"); Serial2.println(POS_PARAM); Serial2.println("Enter : execute"); Serial2.println("----------------"); } 26
27.
// UARTの割り込み時の処理 voidserialInterrupt(byte buffer){ switch(buffer)
{ case'w': // wが押されたとき pos += POS_PARAM; // 最大値でリミット if(pos >= DXL_POS_MAX) { pos = DXL_POS_MAX; } Serial2.print("Goal Position : "); Serial2.println(pos); break; case's': // sが押されたとき pos -= POS_PARAM; // 最小値でリミット if(pos <= DXL_POS_MIN) { pos = DXL_POS_MIN; } Serial2.print("Goal Position : "); Serial2.println(pos); break; case'r': // enterが押されたとき case'n': // Gaol positionを設定する Dxl.writeDword(DXL_ID_1, DXL_GOAL_POS, pos); break; default: break; } } // メイン処理 voidloop(){ delay(10); } 27
28.
6.1. 値の定義について サンプルコードで使用している定義に関しての説明を記載する。 /* Dynamixel
ID defines */ #define DXL_ID_1 1 DXL_ID_1 は、XL430-W250に割り当てられているID。 /* Dynamixel Address Defines */ #define DXL_TRQ 64 #define DXL_PROFILE_VELOCITY 112 #define DXL_GOAL_POS 116 使用するアドレスを予め定義しておく。 アドレスの詳細は、”表1 XL430-W250 Control Table”を参照。 /* Serial Device Defines for Dynamixel bus */ #define DXL_BUS_SERIAL1 1 //Dynamixel on Serial1(USART1) <-OpenCM9.04 #define DXL_BUS_SERIAL2 2 //Dynamixel on Serial2(USART2) <-LN101,BT210 #define DXL_BUS_SERIAL3 3 //Dynamixel on Serial3(USART3) <-OpenCM 485EXP XL430-W250とOpenCM9.04間で使用するシリアルの設定。 本ケースでは、OpenCM 485 EXPを使用するので、DXL_BUS_SERIAL3を使用する。 /* Parameter Defines */ #define DXL_BAUD_RATE 3 // Dynamixel 2.0 Baudrate -> 0: 9600, 1: 57600, 2: 115200, 3: 1Mbps #define DXL_POS_DEFAULT 0 #define DXL_POS_MAX 4095 #define DXL_POS_MIN 0 #define DXL_UART_BAUD_RATE 57600 #define DXL_VELOCITY_SPEED 200 #define ON 1 #define OFF 0 #define POS_PARAM 100 28
29.
コード上で使用する数値を理解しやすいように、予め定義しておく。 DXL_BAUD_RATEでは、DyanamixelのBaudrateを設定する。 本ケースでは、1Mbpsの3を設定する。 DXL_POS_DEFAULTでは、DyanamixelのデフォルトのGoal Positionを設定する。 DXL_POS_MAX、DXL_POS_MINでは、Goal Positionの最大/最小値を設定する。 最大/最小値は、1.4.
Dnamixelのリンク先のGoal Position (116)を参照。 DXL_UART_BAUD_RATE では、TeraTermと通信するUARTのbaudRateを設定する。 DXL_VELOCITY_SPEED では、Dyanamixelの動作スピードを設定する。 動作スピードは、1.4. Dnamixelのリンク先のProfile Velocity (112)を参照。 本ケースでは、0.229[RPM] × 200 = 45.8となる。実際には、44でリミットされ最大速度で動作す る。 POS_PARAM では、w/sが一度押されたときのGoal Positionの増減値を設定する。 29
30.
6.2. コードの動作について サンプルコードの動作について記載する。 voidsetup(){ // セットアップ待ち delay(1000); //
UARTの初期化 Serial2.begin(DXL_UART_BAUD_RATE); // UARTの割り込み設定 Serial2.attachInterrupt(serialInterrupt); // Dynamixelの設定 Dxl.begin(DXL_BAUD_RATE); Dxl.jointMode(DXL_ID_1); Dxl.writeByte(DXL_ID_1, DXL_TRQ, ON); Dxl.writeDword(DXL_ID_1, DXL_PROFILE_VELOCITY, DXL_VELOCITY_SPEED); // コマンドの説明 Serial2.println("----push key----"); Serial2.print("w : +"); Serial2.println(POS_PARAM); Serial2.print("s : -"); Serial2.println(POS_PARAM); Serial2.println("Enter : execute"); Serial2.println("----------------"); } UARTを使用するために、Serial2の設定を行う。 Serial2.begin(DXL_UART_BAUD_RATE)では、BaudRateの設定を行っている。 Serial2.attachInterrupt(serialInterrupt)では、UARTで外部割り込みを使用する設定を行って いる。 // Dynamixelの設定では、Baudrateの設定、Jointモードの設定、トルクを有効にするための 設定、動作スピードの設定をそれぞれ行っている。 // コマンドの説明では、UART経由で、TeraTerm上にキーの説明を表示する。 30
31.
// UARTの割り込み時の処理 voidserialInterrupt(byte buffer){ switch(buffer)
{ case'w': // wが押されたとき pos += POS_PARAM; // 最大値でリミット if(pos >= DXL_POS_MAX) { pos = DXL_POS_MAX; } Serial2.print("Goal Position : "); Serial2.println(pos); break; case's': // sが押されたとき pos -= POS_PARAM; // 最小値でリミット if(pos <= DXL_POS_MIN) { pos = DXL_POS_MIN; } Serial2.print("Goal Position : "); Serial2.println(pos); break; case'r': // enterが押されたとき case'n': // Goal positionを設定する Dxl.writeDword(DXL_ID_1, DXL_GOAL_POS, pos); break; default: break; } } voidserialInterrupt(byte buffer)では、TeraTermからの入力があった際の動作を記述する。 bufferには、TeraTermから送信した文字が一文字格納される。 TeraTermから送信された文字が、'w'の場合は、現在のGoal positionにPOS_PARAMの値を 加算する。加算後に最大値を以上の場合は、DXL_POS_MAXで値をリミットする。 TeraTermから送信された文字が、's'の場合は、現在のGoal positionにPOS_PARAMの値を 減算する。減算後に最小値を以下の場合は、DXL_POS_MAXで値をリミットする。 TeraTermから送信された文字が、'r'または'n'の場合(Enterが押されたとき)は、現在のGoal PositionをDynamixelに書き込む。 31
32.
TeraTermを起動し、USB Serial Port(COM6)を選択する。 設定→シリアルポートの設定→スピードを57600に設定する。 以下のような画面が表示されれば通信成功。 ※Port番号は、環境によって変わるため注意する。 32
33.
問い合わせ先: 株式会社ロボティズ日本支店 tel:03-6869-8804 e-mail : jp.support@robotis.com 33
Download







![/* Global Variables */
Dynamixel Dxl(DXL_BUS_SERIAL3);
boolmasterMode = true;
/* setup */
voidsetup() {
delay(5000); // Wait DXL boot
Dxl.begin(DXL_BAUD_RATE); // Set Baud Rate 56700
pinMode(BUTTON_1, INPUT_PULLDOWN); // Button1 enable
}
/* main loop */
voidloop() {
unsignedlonggoalPos[2];
unsignedlongpushCnt = 0;
// Get Button State
while(digitalRead(BUTTON_1)) {
pushCnt++;
}
// Chattering control
if( pushCnt > PUSH_CNT ){
masterMode = !masterMode;
}
// Get GoalPos
goalPos[0] = Dxl.readDword(ID_NUM_1,DXL_GOAL_POS);
goalPos[1] = Dxl.readDword(ID_NUM_2,DXL_GOAL_POS);
//Output SerialUSB
SerialUSB.print("GOAL_POS ID1: ");
SerialUSB.println(goalPos[0]);
SerialUSB.print("GOAL_POS ID2: ");
SerialUSB.println(goalPos[1]);
9](https://image.slidesharecdn.com/opencm904draft2018-07-10-180809071846/85/OpenCM-IDE-OpenCM-485-EXP-Dynamixel-X-9-320.jpg)
![// Switch to MASTER/SLAVE
if(masterMode) {
Dxl.writeByte(ID_NUM_1, DXL_LED, ON); // ID1 LED ON
Dxl.writeByte(ID_NUM_2, DXL_LED, OFF); // ID2 LED OFF
Dxl.writeByte(ID_NUM_1, DXL_TRQ, OFF); // ID1 Trq OFF
Dxl.writeByte(ID_NUM_2, DXL_TRQ, ON); // ID2 Trq ON
Dxl.writeDword(ID_NUM_2,DXL_GOAL_POS, goalPos[0] ); // Set ID1
GoalPos
}
else{
Dxl.writeByte(ID_NUM_1, DXL_LED, OFF); // ID1 LED OFF
Dxl.writeByte(ID_NUM_2, DXL_LED, ON); // ID2 LED ON
Dxl.writeByte(ID_NUM_1, DXL_TRQ, ON); // ID1 Trq ON
Dxl.writeByte(ID_NUM_2, DXL_TRQ, OFF); // ID2 Trq OFF
Dxl.writeDword(ID_NUM_1,DXL_GOAL_POS, goalPos[1] ); // Set ID2
GoalPos
}
delay(10); // 10[ms]
}
10](https://image.slidesharecdn.com/opencm904draft2018-07-10-180809071846/85/OpenCM-IDE-OpenCM-485-EXP-Dynamixel-X-10-320.jpg)

![表1 XL430-W250 Control Table
Area Address Size
[byte]
Data Name Description Access initial
Value
RAM 64 1 Torque Enable Motor Torque
On/Off
RW 0
65 1 LED Status LED On/Off RW 0
... ... ... ... ... ...
112 4 Profile Velocity Velocity Value of
Profile
RW 0
116 4 Goal Position Target Position
Value
RW -
/* OpenCM 485 EXP Defines */
#define BUTTON_1 16
BUTTON_1は、OpenCM 485 EXP のタクトスイッチ(Button1)のアドレス。
その他にも、以下のスイッチやLEDが使用可能。
図1 OpenCM 485 EXP LED、Button配置
12](https://image.slidesharecdn.com/opencm904draft2018-07-10-180809071846/85/OpenCM-IDE-OpenCM-485-EXP-Dynamixel-X-12-320.jpg)

![3.2. コードの動作について
サンプルコードの動作について記載する。
/* setup */
voidsetup() {
delay(5000); // Wait DXL boot
Dxl.begin(DXL_BAUD_RATE); // Set Baud Rate 1Mbps
pinMode(BUTTON_1, INPUT_PULLDOWN); // Button1 enable
}
setup()では、Dynamixelがブートするまでの待機時間、BaudRateの設定、OpenCM 485
EXPのButton1を有効にするための設定をそれぞれ行っている。
// Get Button State
while(digitalRead(BUTTON_1)) {
pushCnt++;
}
// Chattering control
if( pushCnt > PUSH_CNT ){
masterMode = !masterMode;
}
タクトスイッチでMaster/Slaveを切り替える。
チャタリングでの誤動作を防止するために、ある程度ボタンが押されたらMaster/Slaveを入
れ替える。
// Get GoalPos
goalPos[0] = Dxl.readDword(ID_NUM_1,DXL_GOAL_POS);
goalPos[1] = Dxl.readDword(ID_NUM_2,DXL_GOAL_POS);
//Output SerialUSB
SerialUSB.print("GOAL_POS ID1: ");
SerialUSB.print(goalPos[0]);
SerialUSB.print(" GOAL_POS ID2: ");
SerialUSB.println(goalPos[1]);
14](https://image.slidesharecdn.com/opencm904draft2018-07-10-180809071846/85/OpenCM-IDE-OpenCM-485-EXP-Dynamixel-X-14-320.jpg)
![// Switch to MASTER/SLAVE
if(masterMode) {
Dxl.writeByte(ID_NUM_1, DXL_LED, ON); // ID1 LED ON
Dxl.writeByte(ID_NUM_2, DXL_LED, OFF); // ID2 LED OFF
Dxl.writeByte(ID_NUM_1, DXL_TRQ, OFF); // ID1 Trq OFF
Dxl.writeByte(ID_NUM_2, DXL_TRQ, ON); // ID2 Trq ON
Dxl.writeDword(ID_NUM_2,DXL_GOAL_POS, goalPos[0] ); // Set ID1
GoalPos
}
else{
Dxl.writeByte(ID_NUM_1, DXL_LED, OFF); // ID1 LED OFF
Dxl.writeByte(ID_NUM_2, DXL_LED, ON); // ID2 LED ON
Dxl.writeByte(ID_NUM_1, DXL_TRQ, ON); // ID1 Trq ON
Dxl.writeByte(ID_NUM_2, DXL_TRQ, OFF); // ID2 Trq OFF
Dxl.writeDword(ID_NUM_1,DXL_GOAL_POS, goalPos[1] ); // Set ID2
GoalPos
}
タクトスイッチが押されると、masterModeが切り替わる。
Dxl.writeByte(ID_NUM_1, DXL_LED, ON)では、ID 1のLEDを点灯に設定している。
Dxl.writeByte(ID_NUM_1, DXL_TRQ, ON)では、ID 1のMotor TorqueをONに設定してい
る。
※TorqueをONに設定すると、ROM領域の書き込みがロックされる。
Dxl.writeDword(ID_NUM_1,DXL_GOAL_POS, goalPos[1] )では、ID 1のGoal Positionに
ID 2のGoal Positionを設定している。
また、writeByteは1Byteの書き込みで、writeDwordは4Byteの書き込みである。
使用する関数は、前記してある”表1 XL430-W250 Control Table“のsize[byte]に応じて使い分
ける必要がある。
※sizeが2Byteの場合は、writeWordを使用する。
16](https://image.slidesharecdn.com/opencm904draft2018-07-10-180809071846/85/OpenCM-IDE-OpenCM-485-EXP-Dynamixel-X-16-320.jpg)
![4. 同期制御サンプルコードの説明
SyncWriteメソッドを用いてDynamixelの同期制御を行う。
<動作概要>
・ID1~3のXL430-W250を同期させて動作させる。
・ID1,3は同じ向きに動作。ID 2は逆側に動作する。
以下、サンプルコード。
/* Dynamixel ID defines */
#define DXL_ID_1 1
#define DXL_ID_2 2
#define DXL_ID_3 3
/* Dynamixel Address Defines */
#define DXL_TRQ 64
#define DXL_LED 65
#define DXL_PROFILE_VELOCITY 112
#define DXL_GOAL_POS 116
/* Serial Device Defines for Dynamixel bus */
#define DXL_BUS_SERIAL1 1 //Dynamixel on Serial1(USART1) <-OpenCM9.04
#define DXL_BUS_SERIAL2 2 //Dynamixel on Serial2(USART2) <-LN101,BT210
#define DXL_BUS_SERIAL3 3 //Dynamixel on Serial3(USART3) <-OpenCM
485EXP
/* Parameter Defines */
#define OFF 0
#define ON 1
#define DXL_BAUD_RATE 3 // Dynamixel 2.0 Baudrate -> 0: 9600, 1:
57600, 2: 115200, 3: 1Mbps
#define PACKET_LEN 9
#define NUM_OF_DATA 2
#define DXL_NUM 3
/* Global Variables */
Dynamixel Dxl(DXL_BUS_SERIAL3);
byte dxlId[DXL_NUM] = {
DXL_ID_1,
DXL_ID_2,
DXL_ID_3
17](https://image.slidesharecdn.com/opencm904draft2018-07-10-180809071846/85/OpenCM-IDE-OpenCM-485-EXP-Dynamixel-X-17-320.jpg)
![};
word SyncVelocity1[PACKET_LEN] =
{
//ID ,Profile Velocity
DXL_ID_1, 100, 0,
DXL_ID_2, 100, 0,
DXL_ID_3, 100, 0
};
word SyncVelocity2[PACKET_LEN] =
{
//ID ,Profile Velocity
DXL_ID_1, 200, 0,
DXL_ID_2, 200, 0,
DXL_ID_3, 200, 0
};
word SyncGoalPos1[PACKET_LEN] =
{
//ID ,Goal Position
DXL_ID_1, 1024, 0,
DXL_ID_2, 1024, 0,
DXL_ID_3, 1024, 0
};
word SyncGoalPos2[PACKET_LEN] =
{
//ID ,Goal Position
DXL_ID_1, 0, 0,
DXL_ID_2, 2048, 0,
DXL_ID_3, 2048, 0
};
/* setup */
voidsetup() {
delay(5000); // Wait DXL boot
Dxl.begin(DXL_BAUD_RATE); // Set Baud Rate 1Mbps
for(intcnt = 0; cnt < DXL_NUM; cnt++) {
Dxl.jointMode(dxlId[cnt]); // Set Dynamixel ID
Dxl.writeByte(dxlId[cnt], DXL_TRQ, ON); // Set Trq on
18](https://image.slidesharecdn.com/opencm904draft2018-07-10-180809071846/85/OpenCM-IDE-OpenCM-485-EXP-Dynamixel-X-18-320.jpg)
![}
}
/* main loop */
voidloop() {
// Sync write
Dxl.syncWrite(DXL_PROFILE_VELOCITY, NUM_OF_DATA, SyncVelocity1,
PACKET_LEN);
Dxl.syncWrite(DXL_GOAL_POS, NUM_OF_DATA, SyncGoalPos1, PACKET_LEN);
delay(1000); // 1000[ms]
// Sync write
Dxl.syncWrite(DXL_PROFILE_VELOCITY, NUM_OF_DATA, SyncVelocity2,
PACKET_LEN);
Dxl.syncWrite(DXL_GOAL_POS, NUM_OF_DATA, SyncGoalPos2, PACKET_LEN);
delay(1000); // 1000[ms]
}
19](https://image.slidesharecdn.com/opencm904draft2018-07-10-180809071846/85/OpenCM-IDE-OpenCM-485-EXP-Dynamixel-X-19-320.jpg)


![4.2. コードの動作について
サンプルコードの動作について記載する。
/* setup */
voidsetup() {
delay(5000); // Wait DXL boot
Dxl.begin(DXL_BAUD_RATE); // Set Baud Rate 1Mbps
for(intcnt = 0; cnt < DXL_NUM; cnt++) {
Dxl.jointMode(dxlId[cnt]); // Set Dynamixel ID
Dxl.writeByte(dxlId[cnt], DXL_TRQ, ON); // Set Trq on
}
}
setup()では、Baudrateの設定、Jointモードの設定、トルクを有効にするための設定をそれ
ぞれ行っている。
/* main loop */
voidloop() {
// Sync write
Dxl.syncWrite(DXL_PROFILE_VELOCITY, NUM_OF_DATA, SyncVelocity1,
PACKET_LEN);
Dxl.syncWrite(DXL_GOAL_POS, NUM_OF_DATA, SyncGoalPos1, PACKET_LEN);
delay(1000); // 1000[ms]
// Sync write
Dxl.syncWrite(DXL_PROFILE_VELOCITY, NUM_OF_DATA, SyncVelocity2,
PACKET_LEN);
Dxl.syncWrite(DXL_GOAL_POS, NUM_OF_DATA, SyncGoalPos2, PACKET_LEN);
delay(1000); // 1000[ms]
}
メインの処理では、先にVelocityを設定し、Goal Positionを設定した契機で動作する。
Dynamixelでは、目標角度と速度を設定し簡単にモータの制御を行う事ができる。
22](https://image.slidesharecdn.com/opencm904draft2018-07-10-180809071846/85/OpenCM-IDE-OpenCM-485-EXP-Dynamixel-X-22-320.jpg)





![コード上で使用する数値を理解しやすいように、予め定義しておく。
DXL_BAUD_RATEでは、DyanamixelのBaudrateを設定する。
本ケースでは、1Mbpsの3を設定する。
DXL_POS_DEFAULTでは、DyanamixelのデフォルトのGoal Positionを設定する。
DXL_POS_MAX、DXL_POS_MINでは、Goal Positionの最大/最小値を設定する。
最大/最小値は、1.4. Dnamixelのリンク先のGoal Position (116)を参照。
DXL_UART_BAUD_RATE では、TeraTermと通信するUARTのbaudRateを設定する。
DXL_VELOCITY_SPEED では、Dyanamixelの動作スピードを設定する。
動作スピードは、1.4. Dnamixelのリンク先のProfile Velocity (112)を参照。
本ケースでは、0.229[RPM] × 200 = 45.8となる。実際には、44でリミットされ最大速度で動作す
る。
POS_PARAM では、w/sが一度押されたときのGoal Positionの増減値を設定する。
29](https://image.slidesharecdn.com/opencm904draft2018-07-10-180809071846/85/OpenCM-IDE-OpenCM-485-EXP-Dynamixel-X-29-320.jpg)





![[DL輪読会]Weakly-Supervised Disentanglement Without Compromises](https://cdn.slidesharecdn.com/ss_thumbnails/20200619akuzawa-200630053016-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DLHacks]XLNet を動かして可視化してみた](https://cdn.slidesharecdn.com/ss_thumbnails/20190708dlhacksxlnet-190815055019-thumbnail.jpg?width=640&height=640&fit=bounds)












![[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models](https://cdn.slidesharecdn.com/ss_thumbnails/mainslideshare1-190927025239-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Meta Reinforcement Learning](https://cdn.slidesharecdn.com/ss_thumbnails/metarl-190201005548-thumbnail.jpg?width=640&height=640&fit=bounds)







































