Download as PDF, PPTX
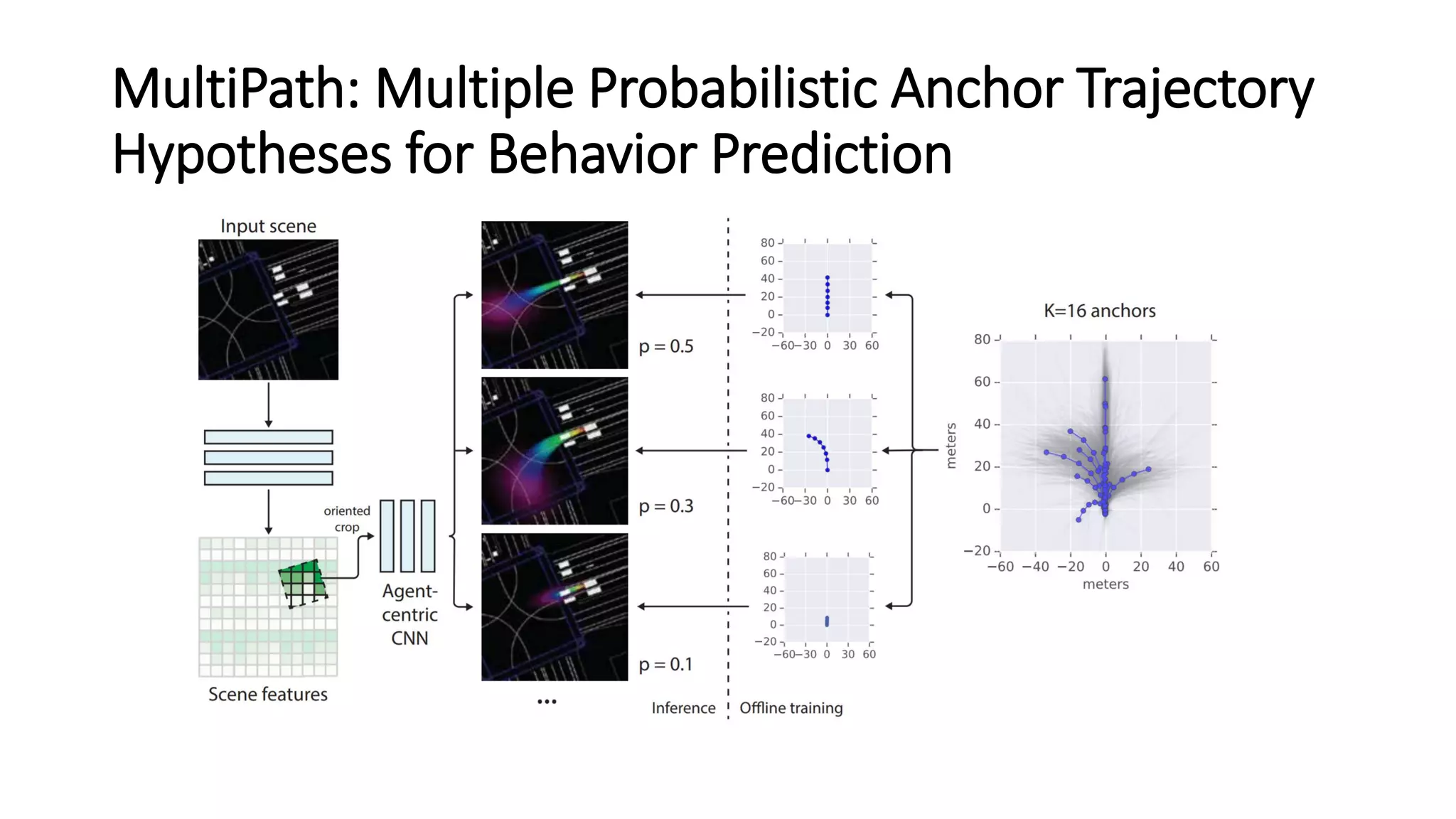
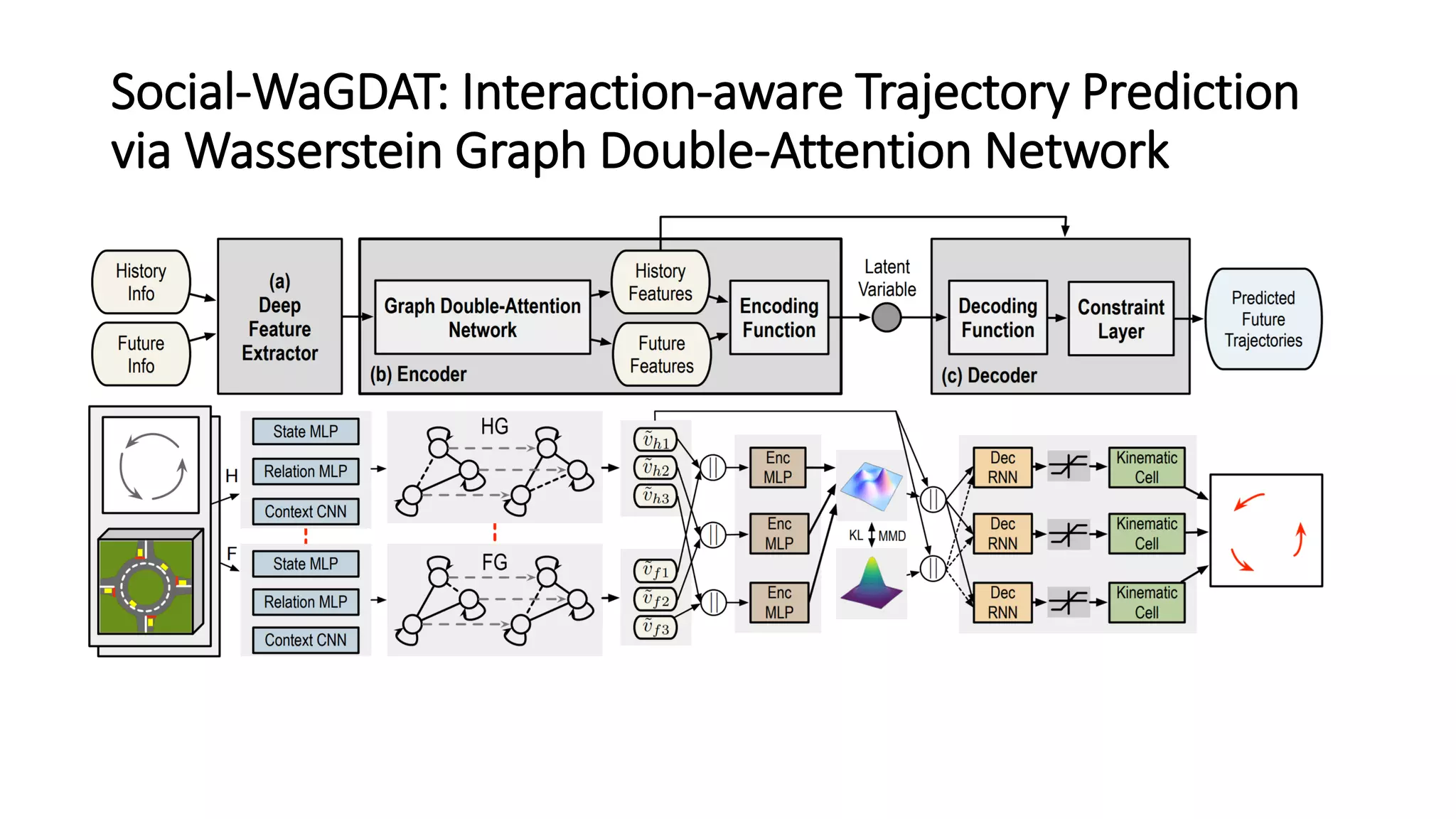
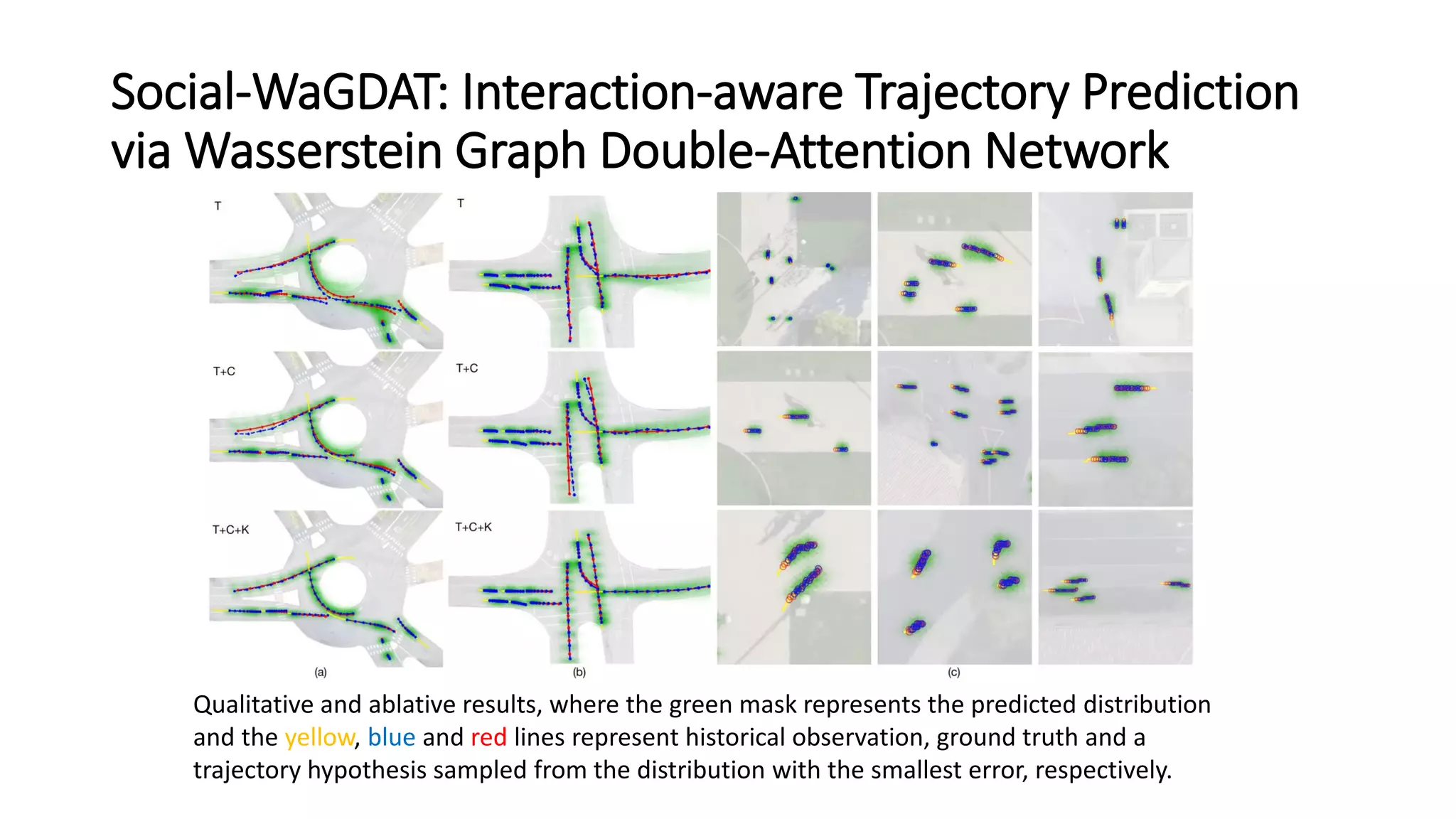
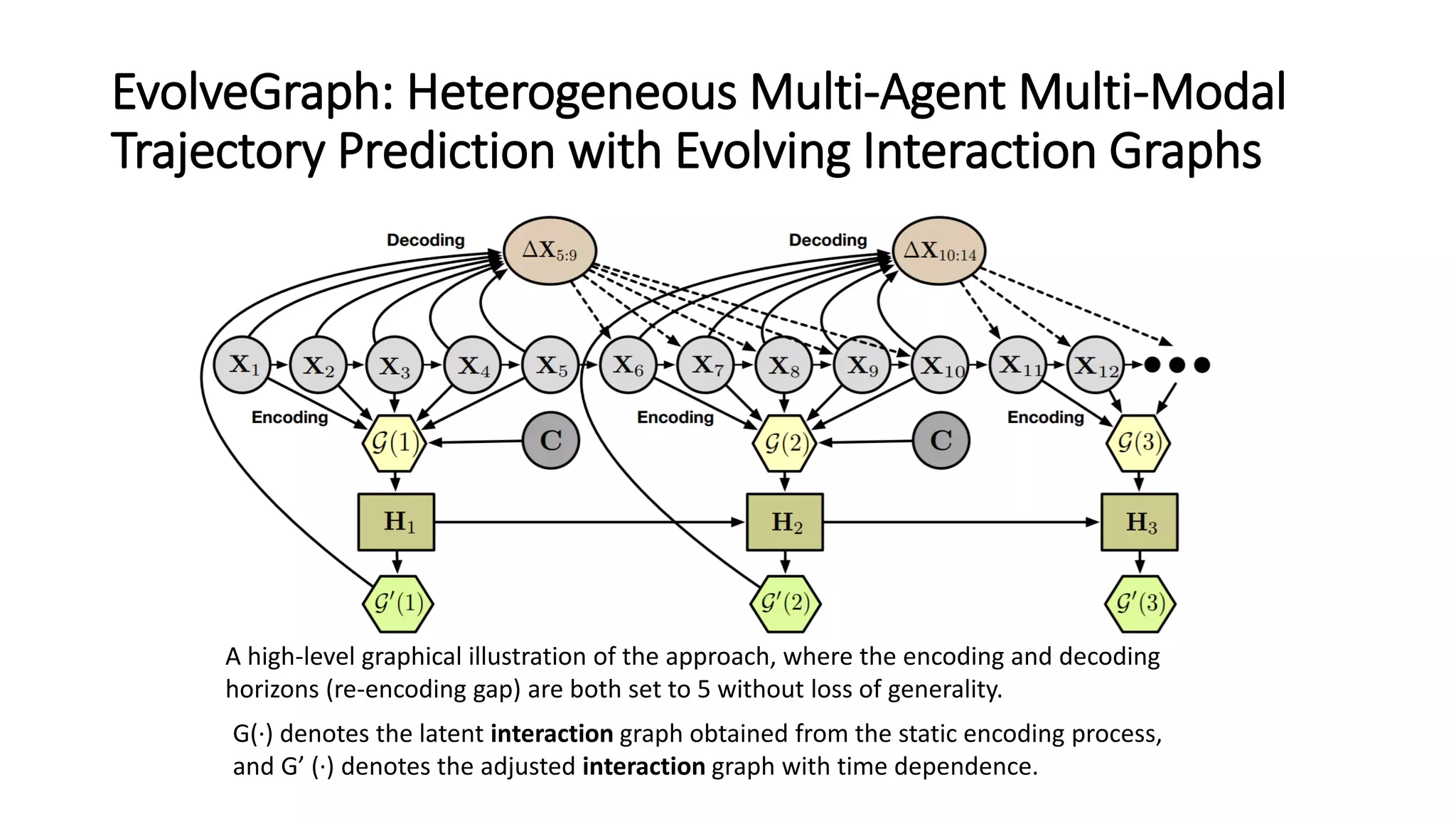
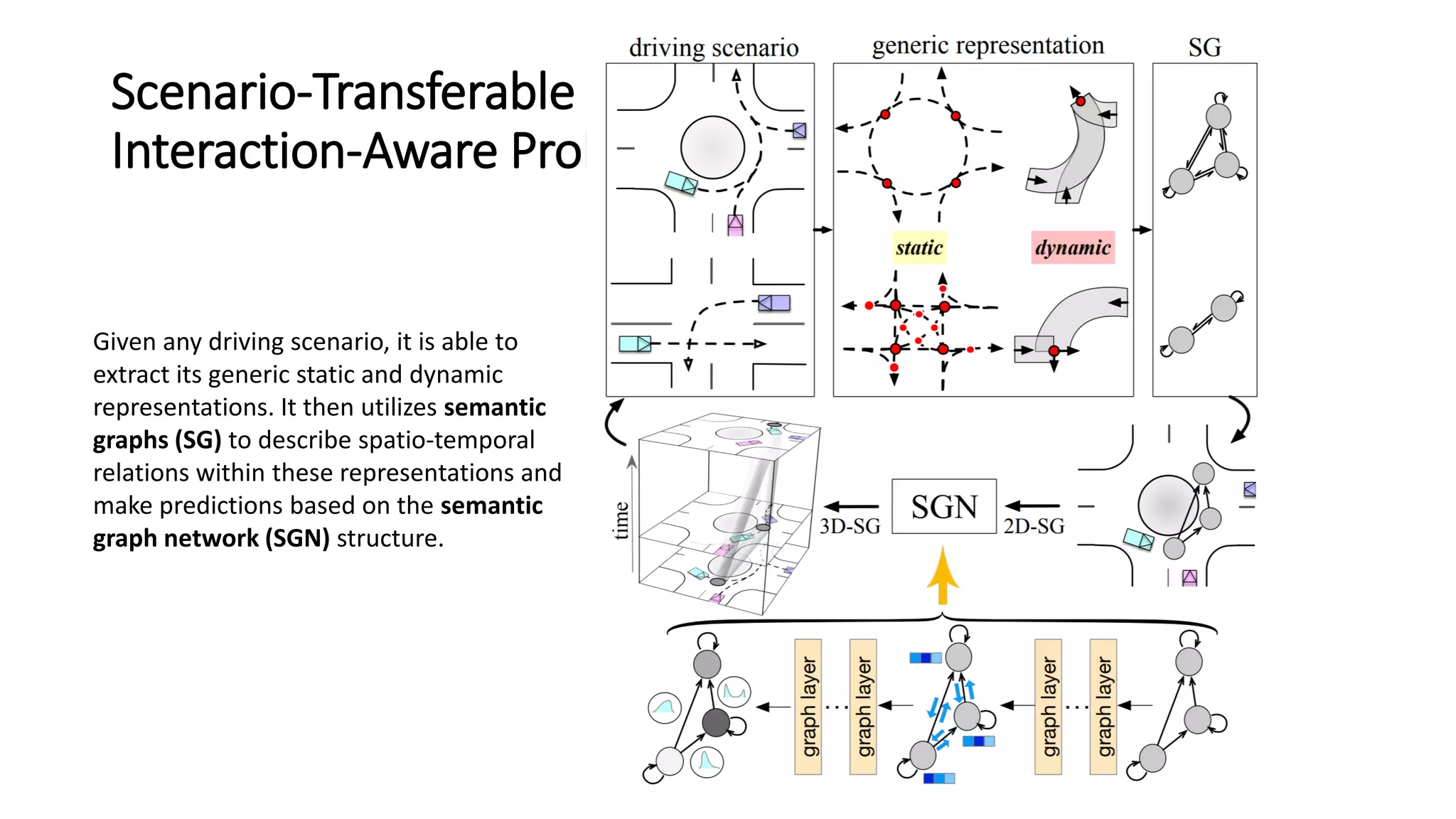


The document discusses various advanced techniques for behavior prediction in autonomous driving, focusing on models such as Multipath, Social-WAGDAT, and EvolveGraph. These methodologies leverage probabilistic anchor trajectories, graph neural networks, and a combination of environment representations to improve forecasting accuracy for vehicle and pedestrian movements. Each approach incorporates different aspects of interaction modeling and scene understanding to handle the uncertainties and complexities of real-world driving scenarios.






























![[20240520_LabSeminar_Huy]DSTAGNN: Dynamic Spatial-Temporal Aware Graph Neural...](https://cdn.slidesharecdn.com/ss_thumbnails/20240520labseminarhuydstagnn-240520123156-67d80b3a-thumbnail.jpg?width=640&height=640&fit=bounds)
![[2024107_LabSeminar_Huy]MFTraj: Map-Free, Behavior-Driven Trajectory Predicti...](https://cdn.slidesharecdn.com/ss_thumbnails/2024107labseminarhuymftraj-241009064509-715fd922-thumbnail.jpg?width=640&height=640&fit=bounds)




![[20240805_LabSeminar_Huy]GPT-ST: Generative Pre-Training of Spatio-Temporal G...](https://cdn.slidesharecdn.com/ss_thumbnails/20240805labseminarhuygpt-st-240806102941-cd305d0d-thumbnail.jpg?width=640&height=640&fit=bounds)

















































