Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Deep Learning JP
2,731 views
[DL輪読会]Disentangling Disentanglement
2019/04/05 Deep Learning JP: http://deeplearning.jp/seminar-2/
Technology
◦
Related topics:
Deep Learning
•
Read more
5
Save
Share
Embed
Embed presentation
Download
Downloaded 21 times
1
/ 12
2
/ 12
3
/ 12
4
/ 12
5
/ 12
6
/ 12
7
/ 12
8
/ 12
9
/ 12
10
/ 12
11
/ 12
12
/ 12
More Related Content
PPTX
【DL輪読会】AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
by
Deep Learning JP
PPTX
【DL輪読会】事前学習用データセットについて
by
Deep Learning JP
PPTX
【DL輪読会】 "Learning to render novel views from wide-baseline stereo pairs." CVP...
by
Deep Learning JP
PPTX
【DL輪読会】Zero-Shot Dual-Lens Super-Resolution
by
Deep Learning JP
PPTX
【DL輪読会】BloombergGPT: A Large Language Model for Finance arxiv
by
Deep Learning JP
PPTX
【DL輪読会】マルチモーダル LLM
by
Deep Learning JP
PDF
【 DL輪読会】ToolLLM: Facilitating Large Language Models to Master 16000+ Real-wo...
by
Deep Learning JP
PPTX
【DL輪読会】AnyLoc: Towards Universal Visual Place Recognition
by
Deep Learning JP
【DL輪読会】AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
by
Deep Learning JP
【DL輪読会】事前学習用データセットについて
by
Deep Learning JP
【DL輪読会】 "Learning to render novel views from wide-baseline stereo pairs." CVP...
by
Deep Learning JP
【DL輪読会】Zero-Shot Dual-Lens Super-Resolution
by
Deep Learning JP
【DL輪読会】BloombergGPT: A Large Language Model for Finance arxiv
by
Deep Learning JP
【DL輪読会】マルチモーダル LLM
by
Deep Learning JP
【 DL輪読会】ToolLLM: Facilitating Large Language Models to Master 16000+ Real-wo...
by
Deep Learning JP
【DL輪読会】AnyLoc: Towards Universal Visual Place Recognition
by
Deep Learning JP
More from Deep Learning JP
PDF
【DL輪読会】Can Neural Network Memorization Be Localized?
by
Deep Learning JP
PPTX
【DL輪読会】Hopfield network 関連研究について
by
Deep Learning JP
PPTX
【DL輪読会】SimPer: Simple self-supervised learning of periodic targets( ICLR 2023 )
by
Deep Learning JP
PDF
【DL輪読会】RLCD: Reinforcement Learning from Contrast Distillation for Language M...
by
Deep Learning JP
PDF
【DL輪読会】"Secrets of RLHF in Large Language Models Part I: PPO"
by
Deep Learning JP
PPTX
【DL輪読会】"Language Instructed Reinforcement Learning for Human-AI Coordination "
by
Deep Learning JP
PPTX
【DL輪読会】Llama 2: Open Foundation and Fine-Tuned Chat Models
by
Deep Learning JP
PDF
【DL輪読会】"Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware"
by
Deep Learning JP
PPTX
【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks fo...
by
Deep Learning JP
PDF
【DL輪読会】Drag Your GAN: Interactive Point-based Manipulation on the Generative ...
by
Deep Learning JP
PDF
【DL輪読会】Self-Supervised Learning from Images with a Joint-Embedding Predictive...
by
Deep Learning JP
PPTX
【DL輪読会】Towards Understanding Ensemble, Knowledge Distillation and Self-Distil...
by
Deep Learning JP
PPTX
【DL輪読会】VIP: Towards Universal Visual Reward and Representation via Value-Impl...
by
Deep Learning JP
PDF
【DL輪読会】Deep Transformers without Shortcuts: Modifying Self-attention for Fait...
by
Deep Learning JP
PPTX
【DL輪読会】マルチモーダル 基盤モデル
by
Deep Learning JP
PPTX
【DL輪読会】TrOCR: Transformer-based Optical Character Recognition with Pre-traine...
by
Deep Learning JP
PDF
【DL輪読会】HyperDiffusion: Generating Implicit Neural Fields withWeight-Space Dif...
by
Deep Learning JP
PPTX
【DL輪読会】大量API・ツールの扱いに特化したLLM
by
Deep Learning JP
PDF
【DL輪読会】DINOv2: Learning Robust Visual Features without Supervision
by
Deep Learning JP
PDF
【DL輪読会】Poisoning Language Models During Instruction Tuning Instruction Tuning...
by
Deep Learning JP
【DL輪読会】Can Neural Network Memorization Be Localized?
by
Deep Learning JP
【DL輪読会】Hopfield network 関連研究について
by
Deep Learning JP
【DL輪読会】SimPer: Simple self-supervised learning of periodic targets( ICLR 2023 )
by
Deep Learning JP
【DL輪読会】RLCD: Reinforcement Learning from Contrast Distillation for Language M...
by
Deep Learning JP
【DL輪読会】"Secrets of RLHF in Large Language Models Part I: PPO"
by
Deep Learning JP
【DL輪読会】"Language Instructed Reinforcement Learning for Human-AI Coordination "
by
Deep Learning JP
【DL輪読会】Llama 2: Open Foundation and Fine-Tuned Chat Models
by
Deep Learning JP
【DL輪読会】"Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware"
by
Deep Learning JP
【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks fo...
by
Deep Learning JP
【DL輪読会】Drag Your GAN: Interactive Point-based Manipulation on the Generative ...
by
Deep Learning JP
【DL輪読会】Self-Supervised Learning from Images with a Joint-Embedding Predictive...
by
Deep Learning JP
【DL輪読会】Towards Understanding Ensemble, Knowledge Distillation and Self-Distil...
by
Deep Learning JP
【DL輪読会】VIP: Towards Universal Visual Reward and Representation via Value-Impl...
by
Deep Learning JP
【DL輪読会】Deep Transformers without Shortcuts: Modifying Self-attention for Fait...
by
Deep Learning JP
【DL輪読会】マルチモーダル 基盤モデル
by
Deep Learning JP
【DL輪読会】TrOCR: Transformer-based Optical Character Recognition with Pre-traine...
by
Deep Learning JP
【DL輪読会】HyperDiffusion: Generating Implicit Neural Fields withWeight-Space Dif...
by
Deep Learning JP
【DL輪読会】大量API・ツールの扱いに特化したLLM
by
Deep Learning JP
【DL輪読会】DINOv2: Learning Robust Visual Features without Supervision
by
Deep Learning JP
【DL輪読会】Poisoning Language Models During Instruction Tuning Instruction Tuning...
by
Deep Learning JP
Recently uploaded
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
アジャイル導入が止まる3つの壁 ─ 文化・他部門・組織プロセスをどう乗り越えるか
by
Graat(グラーツ)
PDF
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
アジャイル導入が止まる3つの壁 ─ 文化・他部門・組織プロセスをどう乗り越えるか
by
Graat(グラーツ)
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
[DL輪読会]Disentangling Disentanglement
1.
1 DEEP LEARNING JP [DL
Papers] http://deeplearning.jp/ Disentangling Disentanglement Hiroshi Sekiguchi, Morikawa Lab
2.
書誌情報 • “Disentangling Disentanglement” (Third
workshop on Bayesian Deep Learning (NeurIPS 2018)) • Author: Emile Mathieu Tom Rainforth N. Siddharth Yee Whye The University of Oxford • 概要: – Disentanglement: 「からまっている物事を解きほぐすこと」、「解きほぐし」 → Disentangling Disentanglement: 「”解きほぐし”のからまりを解きほぐす」 – 既存のVAE生成モデル( VAE、βーVAE):解釈可能な潜在表現を求める解法は、設定問題 に依存していて、一般化するのは難しかった。 → 本研究は、これを一般化するスキームを提案する Generalization of Disentanglement : 「Decomposition(分解)」という言葉を提唱! • 関連プレゼン https://deeplearning.jp/recent-advances-in-autoencoder-based- representation-learning-2/ by 松嶋さん 2
3.
アジェンダ • 既存VAE(VAE、βーVAEなど)の問題点 • 一般化の導入 •
実験結果 • まとめ 3
4.
既存VAE(VAE、βーVAEなど)の問題点(1) • VAEの研究の動機:観測データを生成する潜在変数の直感的な解釈! (例)顔画像の独立な特徴要素:髪の色、顔の向き、拡大縮小 • 既存VAEの方法:観測データから、互いに独立な潜在変数を求めること に注力。これが、Disentanglement「ほぐし」と呼ばれて、優先されてき た。 •
目的関数:以下の𝐿を最大化する – VAEの場合: 𝐿(𝑥) = 𝐸 𝑞Φ(𝑧|𝑥)[log 𝑝θ(𝑥|𝑧)] − 𝐾𝐿(𝑞Φ(𝑧|𝑥)||𝑝θ 𝑧 ) – β-VAEの場合: 𝐿β(𝑥) = 𝐸 𝑞Φ(𝑧|𝑥)[log 𝑝θ(𝑥|𝑧)] − β 𝐾𝐿(𝑞Φ(𝑧|𝑥)||𝑝θ 𝑧 ) 4
5.
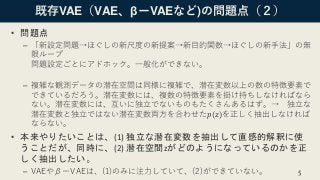
既存VAE(VAE、βーVAEなど)の問題点(2) • 問題点 – 「新設定問題→ほぐしの新尺度の新提案→新目的関数→ほぐしの新手法」の無 限ループ 問題設定ごとにアドホック。一般化ができない。 –
複雑な観測データの潜在空間は同様に複雑で、潜在変数以上の数の特徴要素で できているだろう。潜在変数には、複数の特徴要素を掛け持ちしなければなら ない。潜在変数には、互いに独立でないものもたくさんあるはず。→ 独立な 潜在変数と独立ではない潜在変数両方を合わせた𝑝(𝑧)を正しく抽出しなければ ならない。 • 本来やりたいことは、(1) 独立な潜在変数を抽出して直感的解釈に使 うことだが、同時に、(2) 潜在空間zがどのようになっているのかを正 しく抽出したい。 – VAEやβーVAEは、(1)のみに注力していて、(2)ができていない。 5
6.
一般化の導入(1) • そこで、以下の2つを同時に満たす手法が必要。 (a) 潜在空間内の重なり(Overlap)が丁度良いこと(大きすぎず小さすぎず): 多くの𝑥に対し、エンコーダ𝑞Φ(𝑧|𝑥)が潜在空間に写像する複数の𝑧の密度分布間の 重なり(Overlap)が丁度良いこと:これが満たせれれば、意味のあるエンコーダ。 重なりが大きすぎ:観測データ𝑥と潜在変数𝑧の間の写像がボケ過ぎて写像ではなくなる 重なりが小さすぎ:𝑥と𝑧の関係が決定論的になり、本来の確率生成モデルの趣旨からはずれる (b)
周辺化事後確率𝑞Φ 𝑧 = 𝐸 𝑝 𝐴(𝑥) [𝑞Φ 𝑧 𝑥 ]が事前確率𝑝(𝑧)に近づくこと: ここで、𝑝 𝐴(𝑥)は観測データの母体の確率密度分布: これで、𝑞Φ(𝑧)は𝑝(𝑧)と同じ分布になることが担保される。 6
7.
一般化の導入(2) • 目的関数: – 新提案の場合: 𝐿α,β(𝑥)
= 𝐿β(𝑥) − α 𝐷(𝑞Φ 𝑧 , 𝑝 𝑧 ) = 𝐸 𝑞Φ 𝑧 𝑥 [log 𝑝θ(𝑥|𝑧)] − 𝛽 𝐾𝐿(𝑞Φ(𝑧|𝑥)||𝑝θ 𝑧 ) − α 𝐷(𝑞Φ 𝑧 , 𝑝 𝑧 ) (b)に対応する項目を追加 𝐷 𝑞Φ 𝑧 , 𝑝 𝑧 ≜ 𝐾𝐿(𝑝 𝑧 ||𝑞Φ 𝑧 ) = 𝐸 𝑝 𝑧 [log 𝑝 𝑧 − log(𝐸 𝑝 𝐴(𝑥) [𝑞Φ 𝑧 𝑥 ])] ≈ σ 𝑗=1 𝐵 log 𝑝(𝑧𝑗) − log σ𝑖=1 𝑛 𝑞Φ(𝑧𝑗|𝑥𝑖 • Disentanglement「ほぐし」の尺度:以下のネットワークでの正解率 7Disentanglement by Factorizing(Factor VAE)より
8.
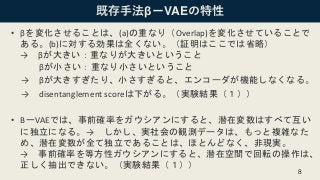
既存手法βーVAEの特性 • βを変化させることは、(a)の重なり(Overlap)を変化させていることで ある。(b)に対する効果は全くない。(証明はここでは省略) → βが大きい:重なりが大きいということ βが小さい:重なり小さいということ →
βが大きすぎたり、小さすぎると、エンコーダが機能しなくなる。 → disentanglement scoreは下がる。(実験結果(1)) • ΒーVAEでは、事前確率をガウシアンにすると、潜在変数はすべて互い に独立になる。→ しかし、実社会の観測データは、もっと複雑なた め、潜在変数が全て独立であることは、ほとんどなく、非現実。 → 事前確率を等方性ガウシアンにすると、潜在空間で回転の操作は、 正しく抽出できない。(実験結果(1)) 8
9.
実験結果(1) • 実験1)事前確率の違いによるdisentanglement scoreの変化 –
手法: α=0すなわちβーVAEの場合 – 事前確率 • 等方性ガウシアン:潜在空間での回転操作が認識不可 • 非等方性ガウシアン: • Student-t分布: – データセット • 2D Shape: 二値画像 64x64画素 737,280個の画像 形:3種類、拡大縮小:6種類、回転:40種類 平行移動:x方向:32種類、y方向:32種類 – エンコーダとデコーダ:CNN+FC – 結果 • Disentanglement Scoreは、事前確率を 変えただけで、良くなる。 • Βが大きい→Disentanglement Scoreは 悪くなる。 9 数字:自由度 数字:β値
10.
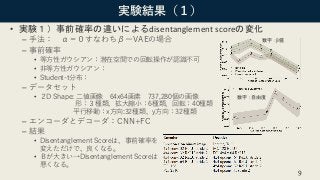
実験結果(2) • 実験2)新提案による周辺化事後分布𝑞Φ 𝑧
= 𝐸 𝑝 𝐴(𝑥) [𝑞Φ 𝑧 𝑥 ]が事前 分布𝑝(𝑧)を表現する例 – 手法: 新手法:αとβを変化 – 事前確率:4等重み付けガウシアン – データセット: • Pinwheel: 400データ – エンコーダとデコーダ:全結合(FC) – 結果 • αを固定して、βを変化させる。βが大きく なると、周辺化事後確率𝑞Φ(𝑧)は、4ガウシアンから 2ガウシアンへの事前確率から離脱してしまう。 • βを固定してαを変化せても、周辺化事後確率𝑞Φ 𝑧 は 4ガウシアンのまま事前確率と合同を維持できる。 → 新提案は有用! 10 事前確率
11.
まとめ • βーVAEの目的関数に、周辺化事後確率𝑞Φ 𝑧
= 𝐸 𝑝 𝐴(𝑥) [𝑞Φ 𝑧 𝑥 ]と、事前 確率𝑝(𝑧)の差異を少なくする正則化を追加して、実世界の事前確率を学 習する手法を提案した。 11
12.
END 12
Download
![1
DEEP LEARNING JP
[DL Papers]
http://deeplearning.jp/
Disentangling Disentanglement
Hiroshi Sekiguchi, Morikawa Lab](https://image.slidesharecdn.com/20190405dldisentanglingdisentanglementver1-190412005025/85/DL-Disentangling-Disentanglement-1-320.jpg?cb=1555030252)
![既存VAE(VAE、βーVAEなど)の問題点(1)
• VAEの研究の動機:観測データを生成する潜在変数の直感的な解釈!
(例)顔画像の独立な特徴要素:髪の色、顔の向き、拡大縮小
• 既存VAEの方法:観測データから、互いに独立な潜在変数を求めること
に注力。これが、Disentanglement「ほぐし」と呼ばれて、優先されてき
た。
• 目的関数:以下の𝐿を最大化する
– VAEの場合: 𝐿(𝑥) = 𝐸 𝑞Φ(𝑧|𝑥)[log 𝑝θ(𝑥|𝑧)] − 𝐾𝐿(𝑞Φ(𝑧|𝑥)||𝑝θ 𝑧 )
– β-VAEの場合: 𝐿β(𝑥) = 𝐸 𝑞Φ(𝑧|𝑥)[log 𝑝θ(𝑥|𝑧)] − β 𝐾𝐿(𝑞Φ(𝑧|𝑥)||𝑝θ 𝑧 )
4](https://image.slidesharecdn.com/20190405dldisentanglingdisentanglementver1-190412005025/85/DL-Disentangling-Disentanglement-4-320.jpg?cb=1555030252)
![一般化の導入(1)
• そこで、以下の2つを同時に満たす手法が必要。
(a) 潜在空間内の重なり(Overlap)が丁度良いこと(大きすぎず小さすぎず):
多くの𝑥に対し、エンコーダ𝑞Φ(𝑧|𝑥)が潜在空間に写像する複数の𝑧の密度分布間の
重なり(Overlap)が丁度良いこと:これが満たせれれば、意味のあるエンコーダ。
重なりが大きすぎ:観測データ𝑥と潜在変数𝑧の間の写像がボケ過ぎて写像ではなくなる
重なりが小さすぎ:𝑥と𝑧の関係が決定論的になり、本来の確率生成モデルの趣旨からはずれる
(b) 周辺化事後確率𝑞Φ 𝑧 = 𝐸 𝑝 𝐴(𝑥)
[𝑞Φ 𝑧 𝑥 ]が事前確率𝑝(𝑧)に近づくこと:
ここで、𝑝 𝐴(𝑥)は観測データの母体の確率密度分布:
これで、𝑞Φ(𝑧)は𝑝(𝑧)と同じ分布になることが担保される。
6](https://image.slidesharecdn.com/20190405dldisentanglingdisentanglementver1-190412005025/85/DL-Disentangling-Disentanglement-6-320.jpg?cb=1555030252)
![一般化の導入(2)
• 目的関数:
– 新提案の場合:
𝐿α,β(𝑥) = 𝐿β(𝑥) − α 𝐷(𝑞Φ 𝑧 , 𝑝 𝑧 )
= 𝐸 𝑞Φ 𝑧 𝑥 [log 𝑝θ(𝑥|𝑧)] − 𝛽 𝐾𝐿(𝑞Φ(𝑧|𝑥)||𝑝θ 𝑧 ) − α 𝐷(𝑞Φ 𝑧 , 𝑝 𝑧 )
(b)に対応する項目を追加
𝐷 𝑞Φ 𝑧 , 𝑝 𝑧 ≜ 𝐾𝐿(𝑝 𝑧 ||𝑞Φ 𝑧 ) = 𝐸 𝑝 𝑧 [log 𝑝 𝑧 − log(𝐸 𝑝 𝐴(𝑥)
[𝑞Φ 𝑧 𝑥 ])]
≈ σ 𝑗=1
𝐵
log 𝑝(𝑧𝑗) − log σ𝑖=1
𝑛
𝑞Φ(𝑧𝑗|𝑥𝑖
• Disentanglement「ほぐし」の尺度:以下のネットワークでの正解率
7Disentanglement by Factorizing(Factor VAE)より](https://image.slidesharecdn.com/20190405dldisentanglingdisentanglementver1-190412005025/85/DL-Disentangling-Disentanglement-7-320.jpg?cb=1555030252)
![実験結果(2)
• 実験2)新提案による周辺化事後分布𝑞Φ 𝑧 = 𝐸 𝑝 𝐴(𝑥)
[𝑞Φ 𝑧 𝑥 ]が事前
分布𝑝(𝑧)を表現する例
– 手法: 新手法:αとβを変化
– 事前確率:4等重み付けガウシアン
– データセット:
• Pinwheel: 400データ
– エンコーダとデコーダ:全結合(FC)
– 結果
• αを固定して、βを変化させる。βが大きく
なると、周辺化事後確率𝑞Φ(𝑧)は、4ガウシアンから
2ガウシアンへの事前確率から離脱してしまう。
• βを固定してαを変化せても、周辺化事後確率𝑞Φ 𝑧 は
4ガウシアンのまま事前確率と合同を維持できる。
→ 新提案は有用!
10
事前確率](https://image.slidesharecdn.com/20190405dldisentanglingdisentanglementver1-190412005025/85/DL-Disentangling-Disentanglement-10-320.jpg?cb=1555030252)
![まとめ
• βーVAEの目的関数に、周辺化事後確率𝑞Φ 𝑧 = 𝐸 𝑝 𝐴(𝑥)
[𝑞Φ 𝑧 𝑥 ]と、事前
確率𝑝(𝑧)の差異を少なくする正則化を追加して、実世界の事前確率を学
習する手法を提案した。
11](https://image.slidesharecdn.com/20190405dldisentanglingdisentanglementver1-190412005025/85/DL-Disentangling-Disentanglement-11-320.jpg?cb=1555030252)