Download to read offline
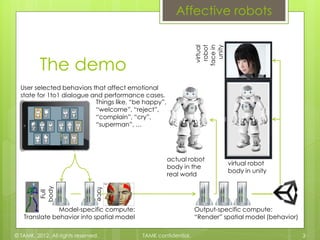




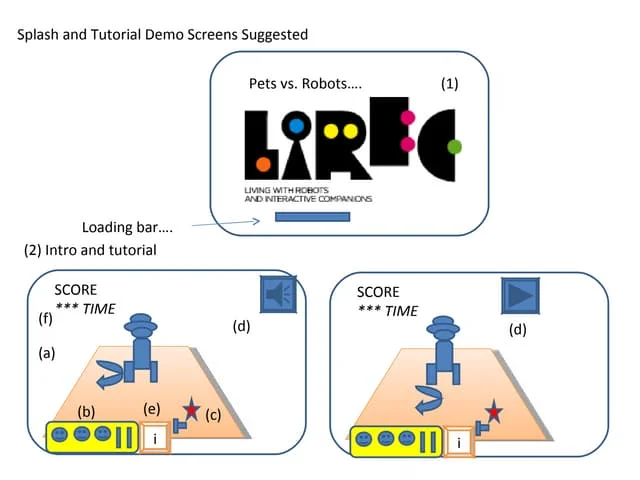
This document discusses an affective robot project. It describes a demo of a social robot that can display different emotional states like happy, welcome, or cry based on user-selected behaviors. An experiment will collect data on how settings and behaviors influence the robot's affects. The goal is to model the link between human affects and robotic expression to change people's states of mind for benefits like health. It outlines the technologies, methodology, and multidisciplinary team to create the virtual and physical robot components.