Downloaded 44 times
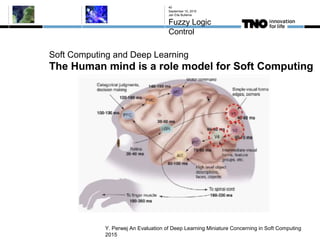
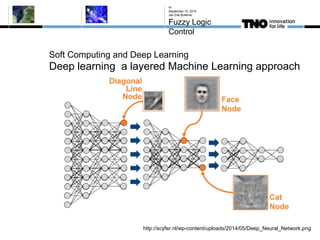


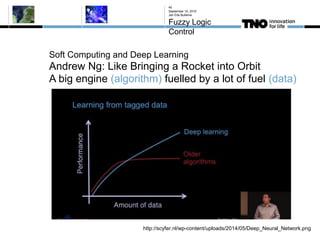
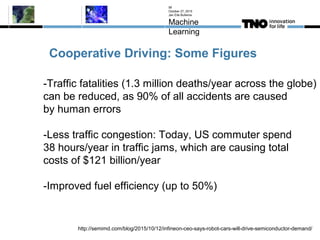

This document discusses fuzzy logic, its applications in areas such as machine learning and vehicle stability control, and its advantage in dealing with ambiguous or incomplete data. It provides examples of how fuzzy logic can enhance self-learning algorithms in soft computing and deep learning contexts. The document also touches on collaborative driving and the potential for reducing traffic accidents, congestion, and fuel consumption.