Download as PDF, PPTX







![FILE FORMAT
Data Driven Development of Autonomous Driving at BMW | DataWorks Summit Berlin | April 2018 Page 13
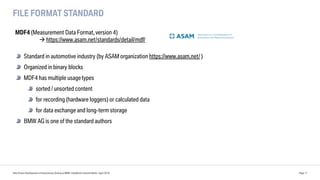
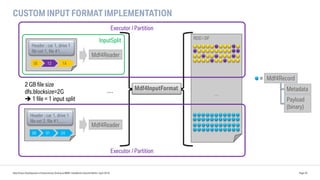
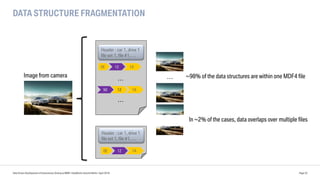
Header : car 1, drive 1
file set 1, file #1, …
0E 12 1A
Header (ID block)
->this is MDF4 of version X
MDF block
Block header
à Block description, size
link[0]
link[1]
---
Link[n]
Data section
à Fields
MDF block
Block header
à Block description, size
link[0]
link[1]
---
Link[n]
Data Section
à Fields
Data block
Block header
à Block description, size
Data Section
à Records / payloads
à Dynamic record size
à No indexing
è This causes the file to
be not split-able
Substructures, like structs, contain metadata downtothe Data Block
We use only 1 data
block here
It covers 99,99% of
thetotalvolume
….](https://image.slidesharecdn.com/dataworkssummit-bmw-dddforad-small-180423160257-180425214715/85/Data-Driven-Development-of-Autonomous-Driving-at-BMW-13-320.jpg)






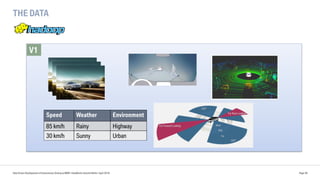







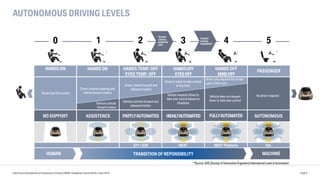
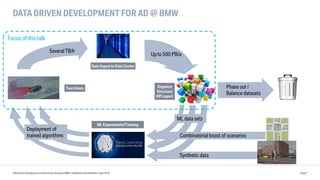
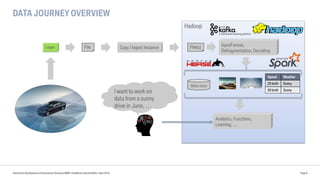
The document presents BMW's approach to data-driven development for autonomous driving, detailing the roles of speakers and the agenda of the DataWorks Summit 2018 in Berlin. It discusses the necessity of data for various levels of automation, the data collection process, the use of the MDF4 file format for data logging, and strategies for data processing, quality assurance, and serving data. It also highlights the importance of data to enhance machine learning and algorithm development in the context of autonomous vehicles.