Download to read offline






![Kineto-Elasto Dynamic Analysis Of Robot Manipulator Puma-560
www.iosrjournals.org 40 | Page
VI. Comparative results
Fig.1 Angular Velocity Fig.2 Angular Acceleration
Fig.3 Base Torque
VII. Conclusion
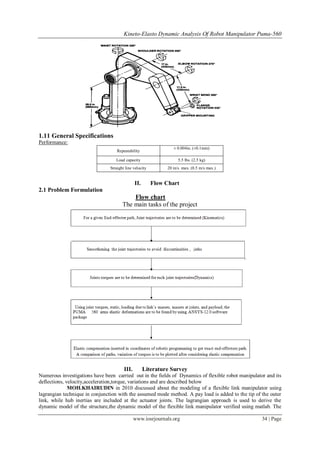
This project presented the Kineto-Elasto dynamic analysis of robot manipulator. The end-effectors
holding an object and passing through a considered path trajectory, the co-ordinate positions of the end-effectors
is considered at ten positions. Inverse kinematic analysis has been performed for finding the corresponding link
positions. Dynamic analysis is performed to find the velocities, accelerations and joint torques for moving the
end-effectors in the considered path trajectory with the help of MATLAB-2008a software. Using joint torques,
static loading due to link’s masses, masses at joints, and payload, the Robot manipulator arms elastic
deformations are found by using ANSYS-12.0 software package. Elastic compensation inserted in the co-
ordinates of robotic programming to get exact end-effectors path. A comparison of path trajectories and
variation of torques is plotted after considering elastic compensation. It is suggested that by compensating the
joints torque variations in the robotic programming, the trajectory path of the end-effectors will be accurate than
the specified repeatability of ±0.1 mm in the manual of PUMA-560.
7.1 Future Scope
1 The robotic programming language can be modified and that can be incorporated and tested with puma robot
for getting accurate path trajectory of the end effectors according to the result obtained in this theses work.
2. This analysis may be further extended by considering the inertia effect due to the speed increased in the
robot arm. Feed back control for position, velocity and acceleration can be incorporated in the analysis.
References
[l] Moh.khairudin, “Dynamic modeling of a flexible link manipulator robot “university negeri, Yogyakarta, Indonesia.2010 ISSN
1693-6930.
[2] A.Ahmadi nadooshan, E.Abedi, s.salehi,”Dynamic modeling of two flexible link manipulator”,2008International journal of aero
space and mechanical engineering.
[3] B.Subudhi, A.S morris “Dynamic modeling,simulation and controling of a manipulator with flexible links and
joints”,2008Robotics and atonomous systems.257-270.
[4] K.S. Fu, R.C. Gonzalez, and C.S.G. Lee, Robotics Control, Sensing, h i o n , and Intelligence,;McGraw-Hill, 1987.](https://image.slidesharecdn.com/d0833340-150115234103-conversion-gate02/85/Kineto-Elasto-Dynamic-Analysis-of-Robot-Manipulator-Puma-560-8-320.jpg)

The document discusses the kineto-elasto dynamic analysis of the Puma-560 robot manipulator, emphasizing the need for lightweight designs to enhance speed and performance while addressing the complexities of dynamic control due to structural flexibility. It outlines the derivation of motion equations based on a distributed parameter method, the use of finite element analysis (FEA) for elastic deformation modeling, and various computational approaches implemented in MATLAB. The findings aim to improve trajectory accuracy and efficiency through elastic compensation in robotic programming.