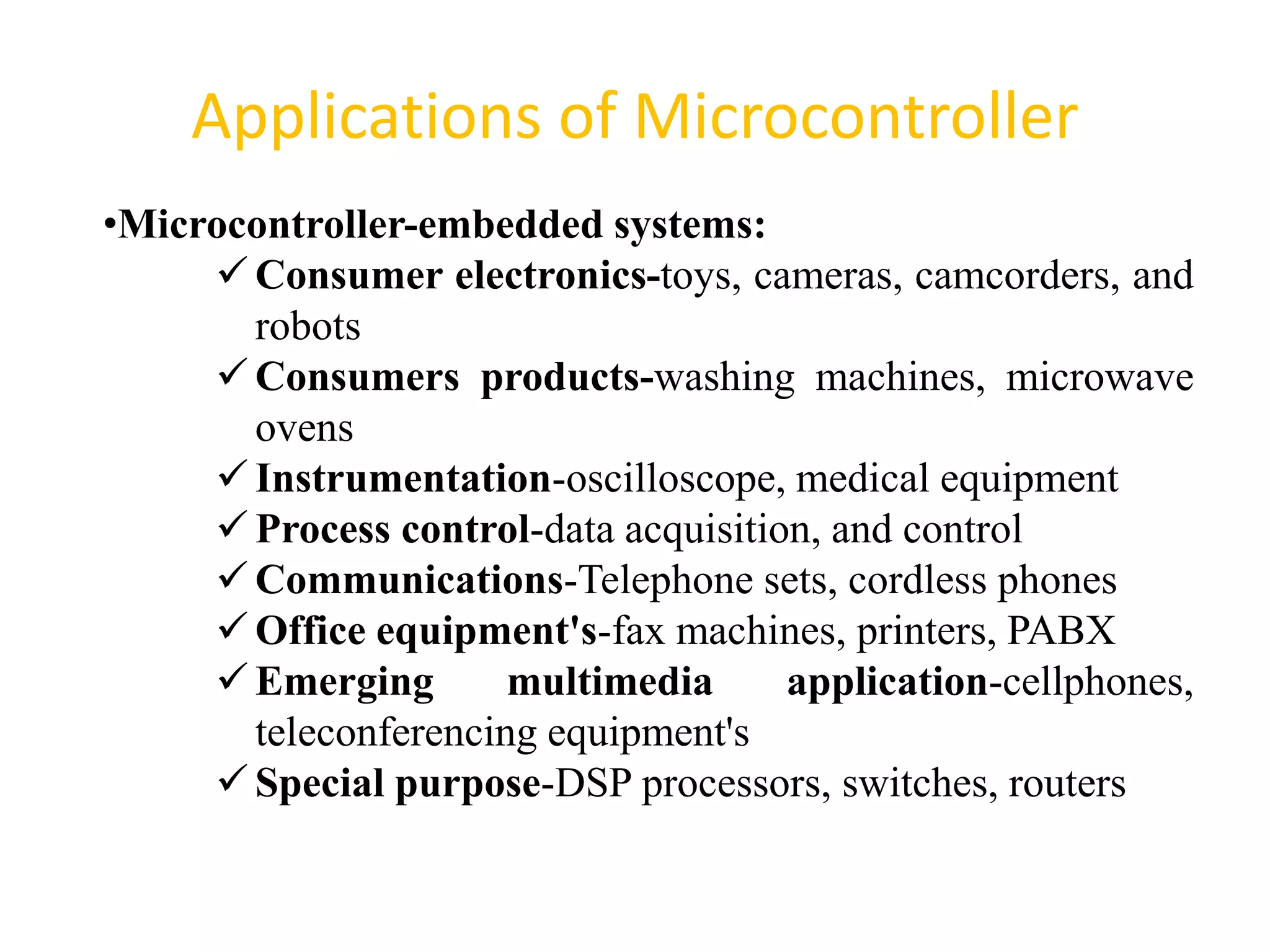
The document provides information about the course "Microprocessor Interfacing & Embedded System" to be offered in Spring 2023. It includes the course code, title, semester, instructor details, course content outline, objectives, outcomes, assessment methods, recommended books, and introduction content. The key topics to be covered are the architecture of microprocessor 8086, interfacing of microprocessor with peripheral devices, assembly language programming, and use of emulators for simulation.
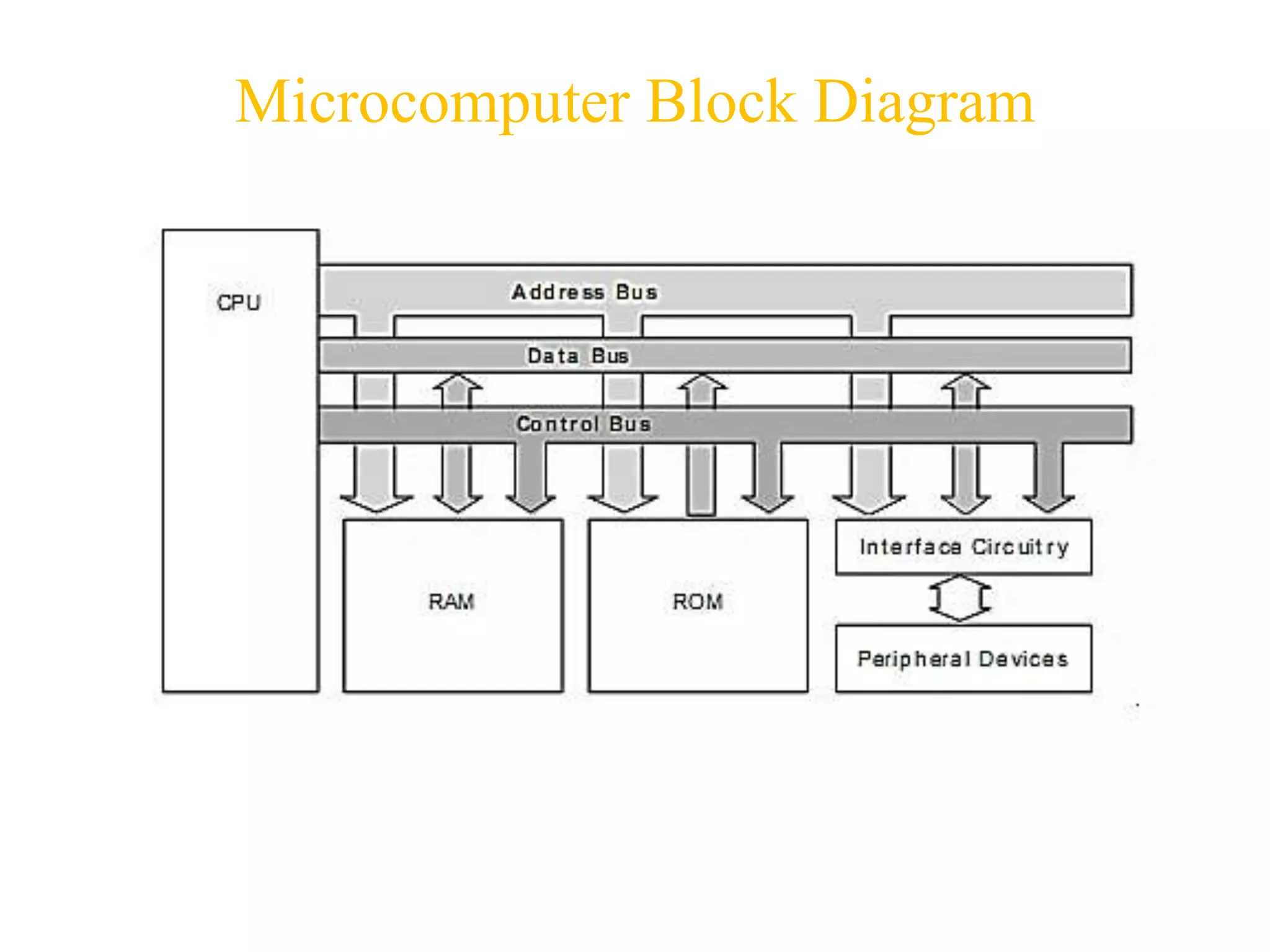

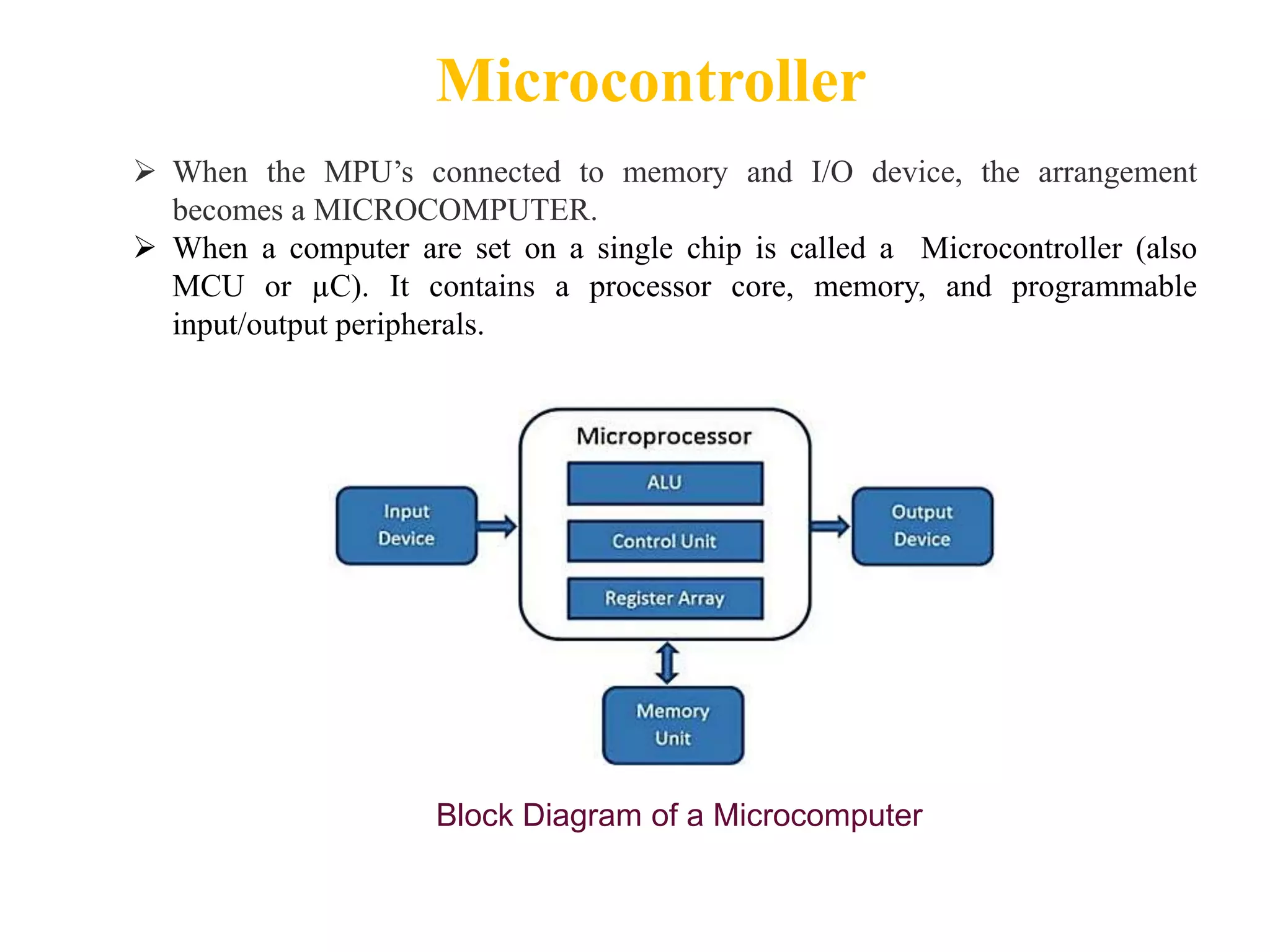
![Connecting Memory to Processor
◆ Interconnection between
processor and memory is
through three sets of wires
known as buses
◆ Address bus establish the
location of memory
◆ Data bus carries the data
◆ Control bus determine read/
write operations etc.
Addr
Reg
Data
Reg
Memory
Up to 2k addressable
locations
Word length = n bits
K-bit
address bus
N-bit
data bus
Control lines
Read/Write
P
M
E
M
O
R
Y
Data [N-1:0]
Address [K-1:0]
CS
OE
WE
◆ Chip Select – must be asserted before Memory will
respond to read or write operation. If negated, data bus
is high impedance.
◆ OE – Output Enable: Asserted for read operation,
Memory will drive data lines.
◆ WE – Write Enable: Asserted for a write operation
(Memory inputs data from data pins, processor writes
to memory).
◆ There may only be one control line (R/W).](https://image.slidesharecdn.com/cse331lecture1-230328082826-3cbd62b7/75/CSE331_Lecture1-pptx-89-2048.jpg)



















































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)











