Download to read offline
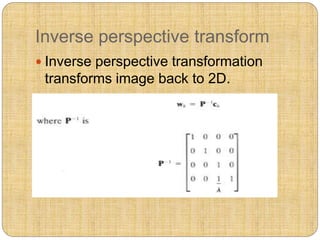
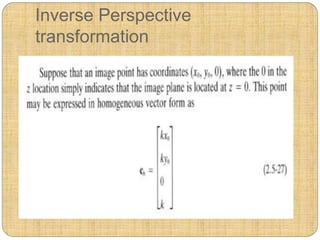


















The document discusses camera models and inverse perspective transforms. It describes how an inverse perspective transformation maps an image back to 2D by assigning any 3D point a Z value of 0. It also explains that an image point (xo,yo) corresponds to a set of collinear 3D points on the line passing through (xi,yi,0) and (0,0,∞). Additionally, it outlines a camera model where the world and camera coordinates are separate, with the camera mounted on a gimbal allowing pan and tilt, and defines offsets from the world and gimbal centers.