Downloaded 43 times

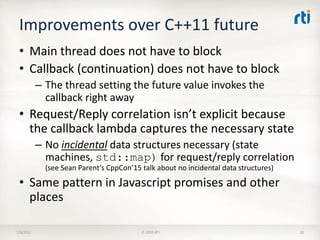
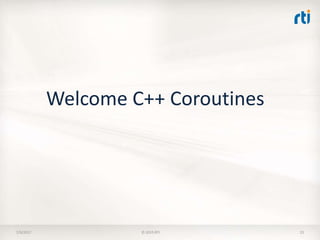
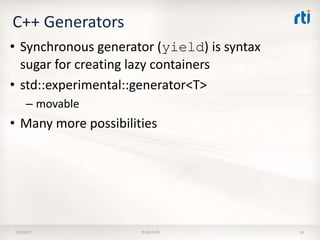
 {
float speed = speed_fut.get();
printf("getSpeed = %fn", speed);
speed += 10;
return robot_client.setSpeed_async(speed);
})
.then([](future<float> && speed_fut) {
try {
float speed = speed_fut.get();
printf("speed set successfully.n");
}
catch (robot::TooFast &) {
printf("Going too fast!n");
}
});](https://image.slidesharecdn.com/cpp-coroutines-meetup-170709230057/85/C-Coroutines-18-320.jpg)
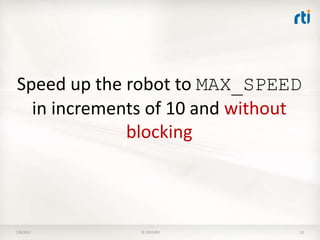
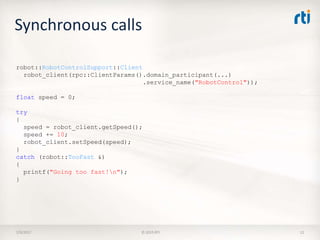
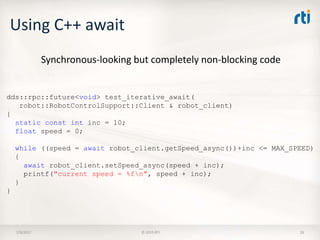
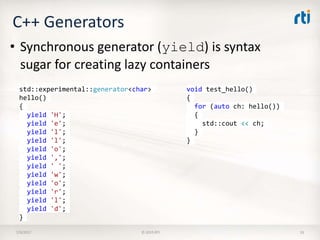
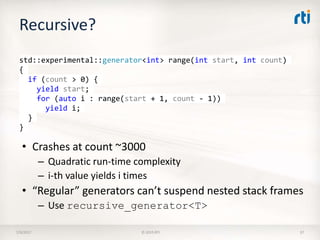
 {
float speed = speed_fut.get();
speed += increment;
if(speed <= MAX_SPEED) {
printf("speedup_until_maxspeed: new speed = %fn", speed);
return robot_client.setSpeed_async(speed);
}
else
return dds::rpc::details::make_ready_future(speed);
})
.then([robot_client](future<float> && speed_fut) {
float speed = speed_fut.get();
if(speed + increment <= MAX_SPEED)
return speedup_until_maxspeed(robot_client);
else
return dds::rpc::details::make_ready_future(speed);
});
}
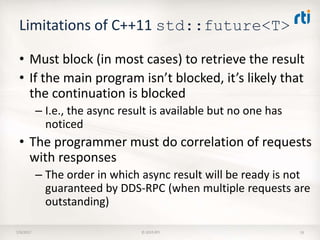
Return ready future?
Why not speed?
Is that recursive?
Does the stack grow?... No!
What are these lambdas doing here?
Is that a CPS transform? … Yes!](https://image.slidesharecdn.com/cpp-coroutines-meetup-170709230057/85/C-Coroutines-21-320.jpg)
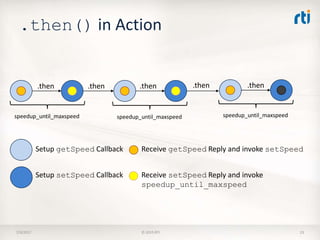
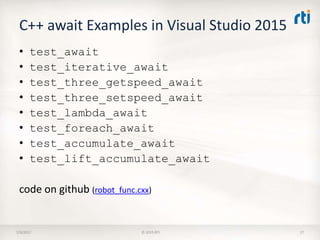
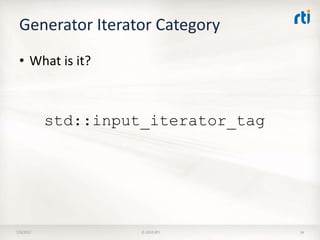
 { return char(ch + 32); })
.take(msg.size());
int i = 0;
for (auto ch: gen)
{
std::cout << ch;
assert(ch == msg[i++]);
}
}](https://image.slidesharecdn.com/cpp-coroutines-meetup-170709230057/85/C-Coroutines-35-320.jpg)

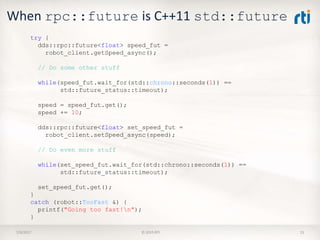
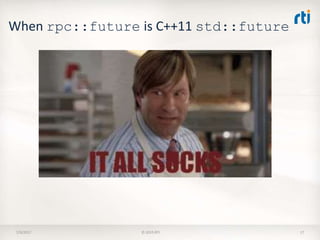
This document provides an overview and agenda for a presentation on polyglot programming and asynchronous programming using C++ features like futures, coroutines, and generators. The presentation introduces DDS-RPC, which allows for remote procedure calls over a data distribution service middleware. It discusses how C++ futures and coroutines can be used to write asynchronous and non-blocking I/O code in a synchronous-looking way. Examples are provided to demonstrate features like serial and parallel composition of futures, using await with coroutines, and using generators to lazily iterate over data.











![[Question Paper] Microprocessor and Microcontrollers (Revised Course) [April ...](https://cdn.slidesharecdn.com/ss_thumbnails/mm-qprevisedcourseapr-2015-170713044202-thumbnail.jpg?width=640&height=640&fit=bounds)