Downloaded 41 times


![IMU-in-the-loop Simulation (Failure Scenarios)
1
Sub-Scenario #1
High Engine Thrust
Replay
Starts
[0:00]
Replay
Ends
[5:00]
(Change Pitch and Roll Physically)
2
Replay
Starts [0:00]
Sub-Scenario #2
Very Low Engine Thrust @ [1:30]
(Change Pitch and Roll Physically)
Engine
Catches Fire
[0:57]
12/3/2013
Very Low Engine
Thrust [1:30]
© 2013 Real-time Innovations, Inc.
Replay Ends [5:00]
13](https://image.slidesharecdn.com/infotechaerospace-131203190505-phpapp01/85/An-Extensible-Architecture-for-Avionics-Sensor-Health-Assessment-Using-DDS-13-320.jpg)
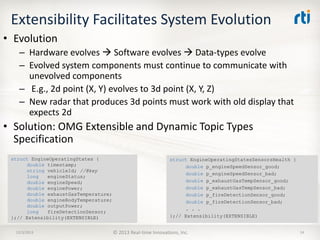

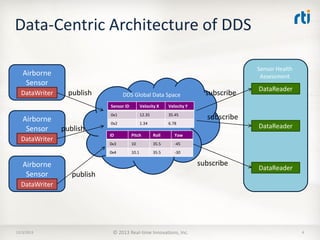
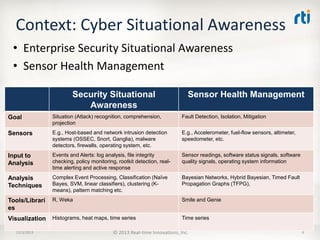
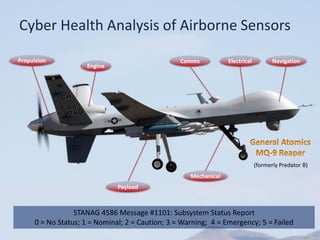
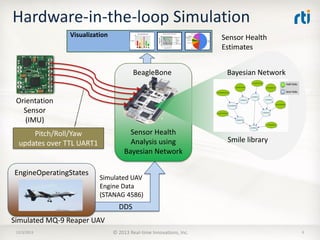
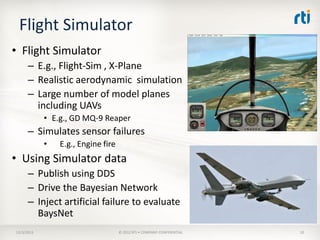
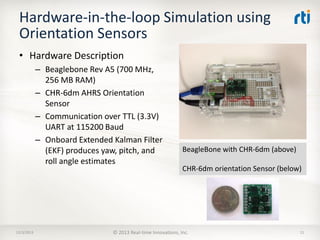
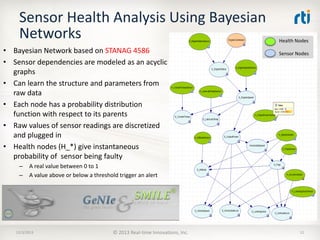
The document discusses an extensible architecture for avionics sensor health assessment using DDS, highlighting NASA's use of RTI Connext DDS for reliable communication between the International Space Station and Earth. It covers research in cyber situational awareness, focusing on sensor health management and fault detection using Bayesian networks, featuring simulations for sensor failure scenarios. The future work section emphasizes expanding cyber situational awareness and enhancing interoperability among airborne software components.



































![[DSC MENA 24] Hatem_Elattar_-_DSC_2024_Talk_Final.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/ti1qwiafslcgsbh2xgsi-hatem-elattar-dsc-2024-talk-final-240427153001-bf78653e-thumbnail.jpg?width=640&height=640&fit=bounds)