

Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (15)
Recently uploaded
Recently uploaded (20)
Bo dieu-khien pid
- 2. PID Controller M c tiêu ñi u khi n : Tri t tiêu sai s xác l p. Gi m th i gian xác l p và ñ v t l . H n ch dao ñ ng.
- 3. PID Controller Ch t lư ng h th ng : Sai s c a h th ng : Sai s xác l p : e(t) u(t) K(s) r(t) G(s) y(t) H(s) yht (t) t s 0 e( ) lim e(t) lim s.E(s) →∞ → ∞ = = )()()()( sHsYsRsE −= )()()()()( sHsGsKsEsR −= )()()(1 )( )( sHsGsK sR sE + =⇒
- 4. PID Controller Nh n xét : Sai s xác l p không ch ph thu c vào c u trúc và thông s c a h mà còn ph thu c vào tín hi u vào. Sai s xác l p ph thu c vào s lư ng khâu lí tư ng có trong hàm truy n h G(s)H(s) : H không có khâu tích phân : luôn có sai s xác l p. 1 khâu tích phân : exl = 0 v i tín hi u vào là hàm n c. 2 khâu tích phân : exl = 0 v i hàm d c và hàm n c. 3 khâu tích phân : exl = 0 v i hàm d c,hàm n c và hàm parabol. H có n khau tích phân lí tư ng g i là h vi sai b c n. Sai s xác l p :
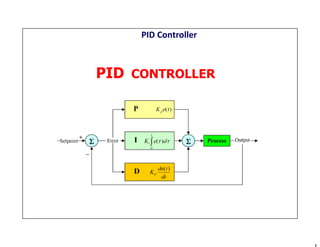
- 5. PID Controller PID (Proportional Integral Derivative Controller ): B ñi u khi n h i ti p vòng kín ñư c s d ng nhi u nh t trong công nghi p. Là s k t h p c a 3 b ñi u khi n : t l , tích phân và vi phân. Có kh năng làm tri t tiêu sai s xác l p, tăng t c ñ ñáp ng, gi m ñ v t l n u thông s c a b ñi u khi n ñư c l a ch n thích h p.
- 6. PID Controller B ñi u khi n PID liên t c :
- 7. PID Controller B ñi u khi n PID s (r i r c) :
- 8. PID Controller Khâu t l (Proportional) : Hàm truy n : K(s) = KP . ð c tính th i gian : Y(s) = Kp.G(s).E(s). Sai s h th ng : )()(1 )( )( sHsGK sR sE P+ = e(t) u(t) KP r(t) G(s) y(t) H(s) yht (t)
- 9. PID Controller Nh n xét : Kp càng l n thì t c ñ ñáp ng càng nhanh. Kp càng l n thì sai s xác l p càng nh (nhưng không th tri t tiêu). Kp càng l n thì các c c c a h th ng có xu hư ng di chuy n ra xa tr c th c => H th ng càng dao ñ ng và ñ v t l càng cao. N u Kp tăng quá giá tr gi i h n thì h th ng s dao ñ ng không t t d n => m t n ñ nh.
- 10. PID Controller Khâu tích phân (Integration) : Hàm truy n : K(s) = KI/s. ð c tính th i gian : Y(s) = KI.G(s).E(s)/s. Sai s h th ng : )()( )(. )( sHsGKs sRs sE I+ = e(t) u(t) KI/s r(t) G(s) y(t) H(s) yht (t)
- 11. PID Controller Nh n xét : Tín hi u ngõ ra ñư c xác ñ nh b i sai s . KI càng l n thì ñáp ng quá ñ càng ch m. KI càng l n thì sai s xác l p càng nh . ð c bi t h s khu ch ñ i c a khâu tích phân b ng vô cùng khi t n s b ng 0 => tri t tiêu sai s xác l p v i hàm n c. KI càng l n thì ñ v t l càng cao.
- 12. PID Controller Khâu vi phân (Derivative) : Hàm truy n : K(s) = KD.s. ð c tính th i gian : Y(s) = KD.G(s).E(s).s. Sai s h th ng : )()(.1 )( )( sHsGKs sR sE D+ = e(t) u(t) KD.S r(t) G(s) y(t) H(s) yht (t)
- 13. PID Controller Nh n xét : KD càng l n thì ñáp ng quá ñ càng nhanh. KD càng l n thì ñ v t l càng nh . H s khu ch ñ i t i t n s cao là vô cùng l n nên khâu hi u ch nh D r t nh y v i nhi u t n s cao. Khâu vi phân không th s d ng m t mình mà ph i dùng k t h p v i các khâu P ho c I.
- 14. Control System B ñi u khi n PID : K t h p c a ba khâu thành ph n. Bi u di n : Cách 1 : Cách 2 : Cách 3 : sKsKKsK DIP ./)( ++= ].)./(11[)( sTsTKsK DIP ++= ).1)(.1()( 21 sTsT s K sK R ++=
- 15. Control System Các phương pháp tìm thông s PID (Kp, Ki, Kd) : Ch nh ñ nh b ng tay. Phương pháp Ziegler – Nichols. Ch nh ñ nh dùng ph n m m. Cohen-Coon.
- 16. Control System Ch nh ñ nh b ng tay : ð t Ki = Kd = 0. Tăng Kp ñ n khi h th ng dao ñ ng tu n hoàn. ð t th i gian tích phân b ng chu kỳ dao ñ ng . ði u ch nh l i giá tr Kp cho phù h p. N u có ñao ñ ng thì ñi u ch nh giá tr Kd.
- 17. Control System Phương pháp Ziegler-Nichols : ð t Ki = Kd = 0. Tăng Kp ñ n khi h th ng dao ñ ng tu n hoàn. ð t giá tr Kp này = Kc ðo chu kì dao ñ ng Pc.
- 18. Control System Ch nh ñ nh b ng ph n m m : Dùng ph n m m ñ t ñ ng ch nh ñ nh thông s PID (th c hi n trên mô hình toán, ki m nghi m trên mô hình th c). Ví d dùng gi i thu t di truy n (GA) ñ tìm thông s sao cho sai s ño ñư c nh hơn giá tr yêu c u.