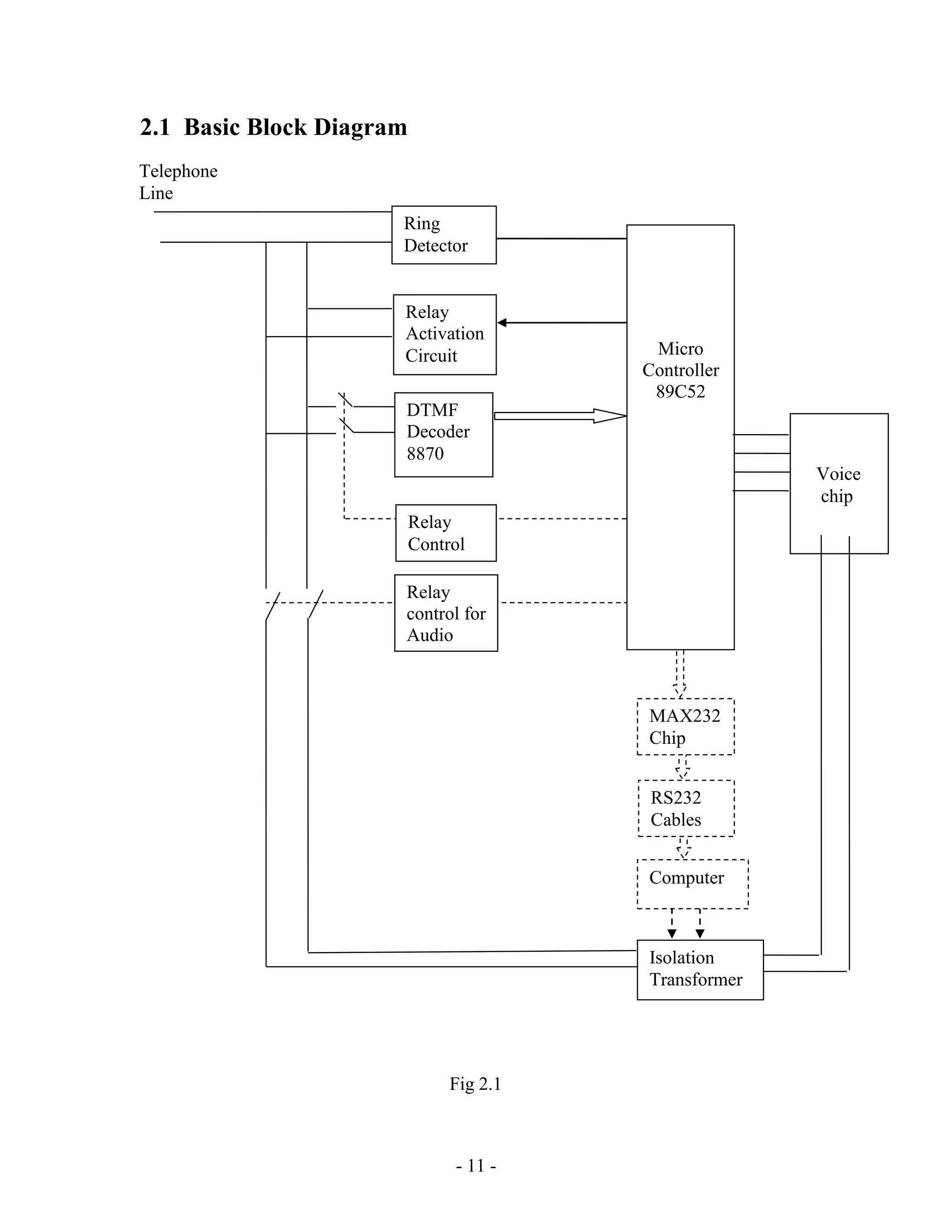
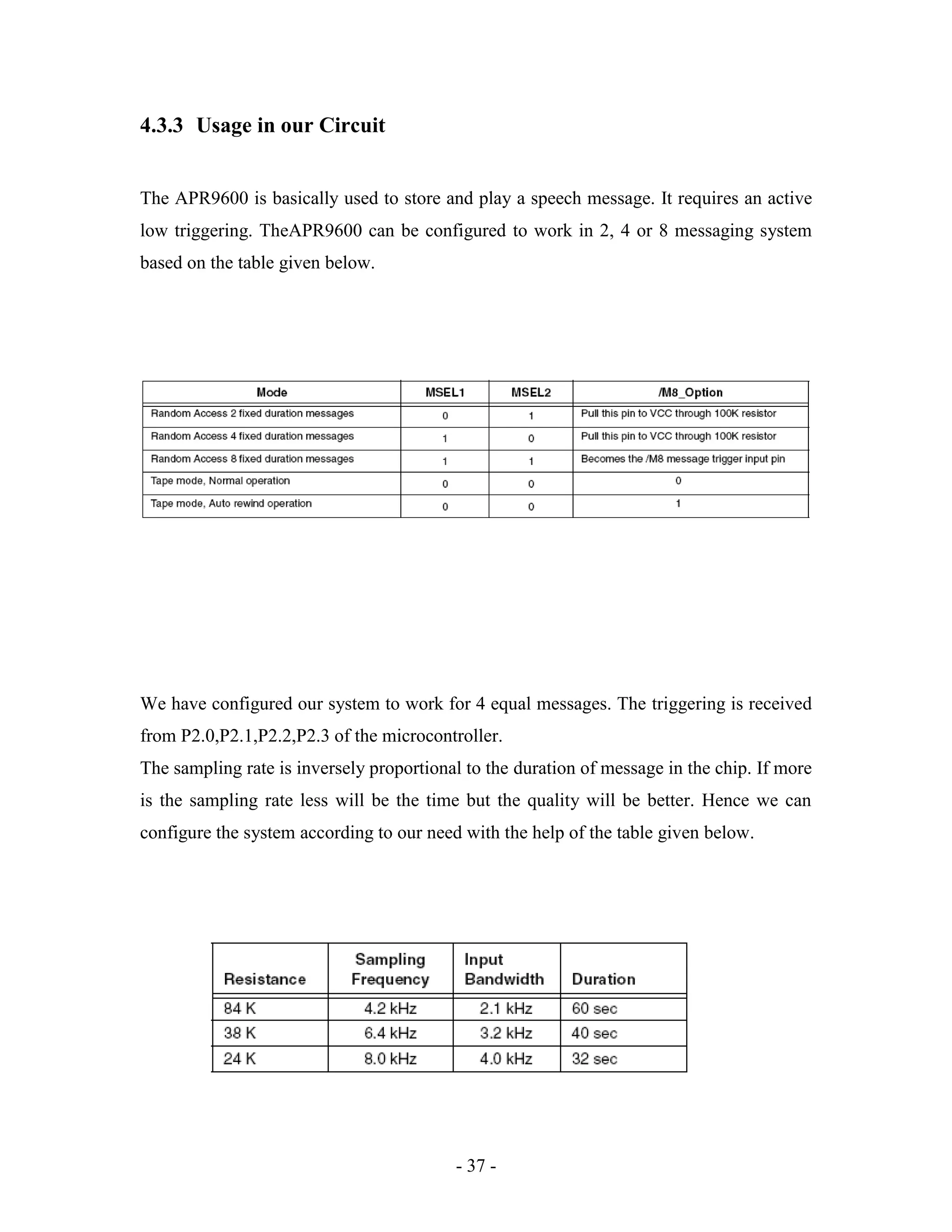
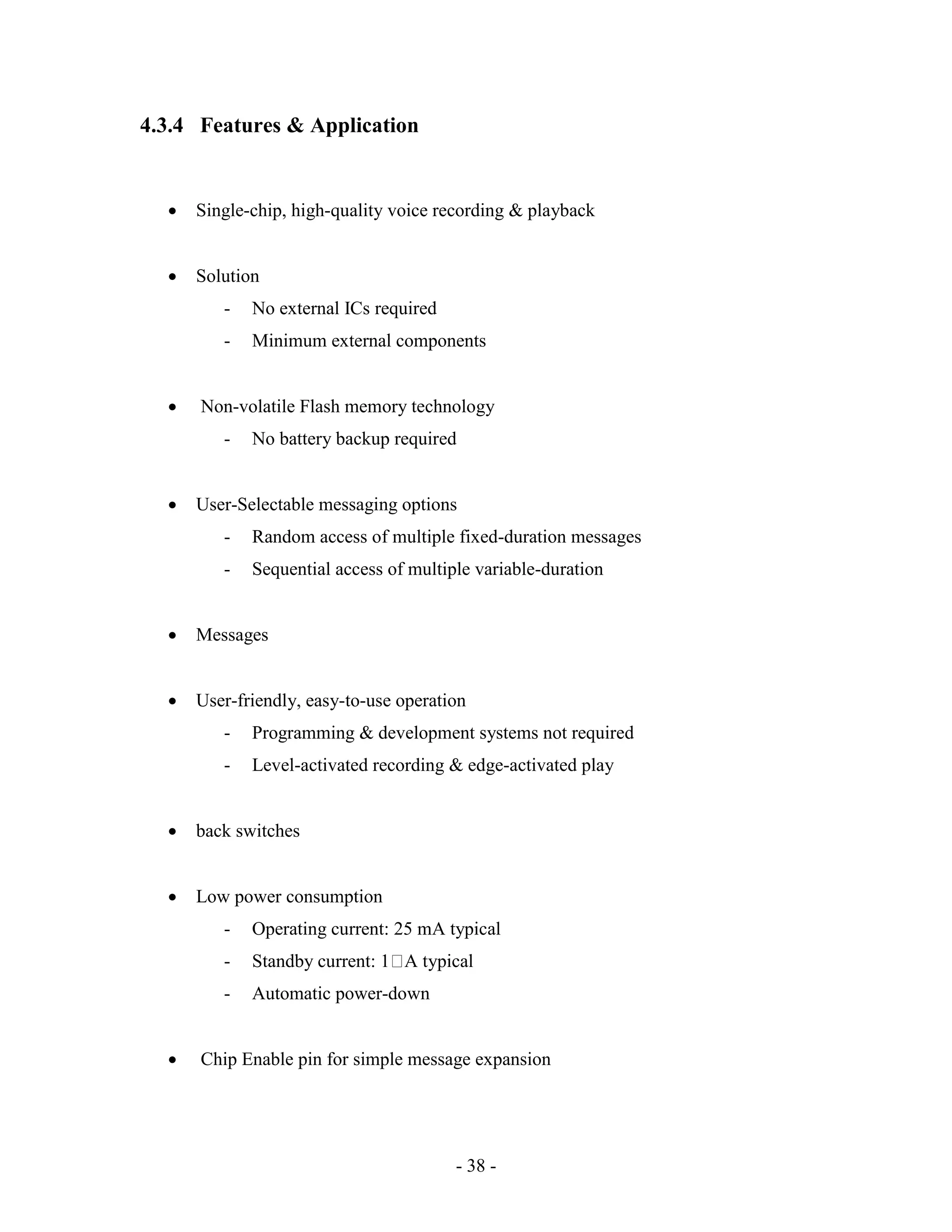
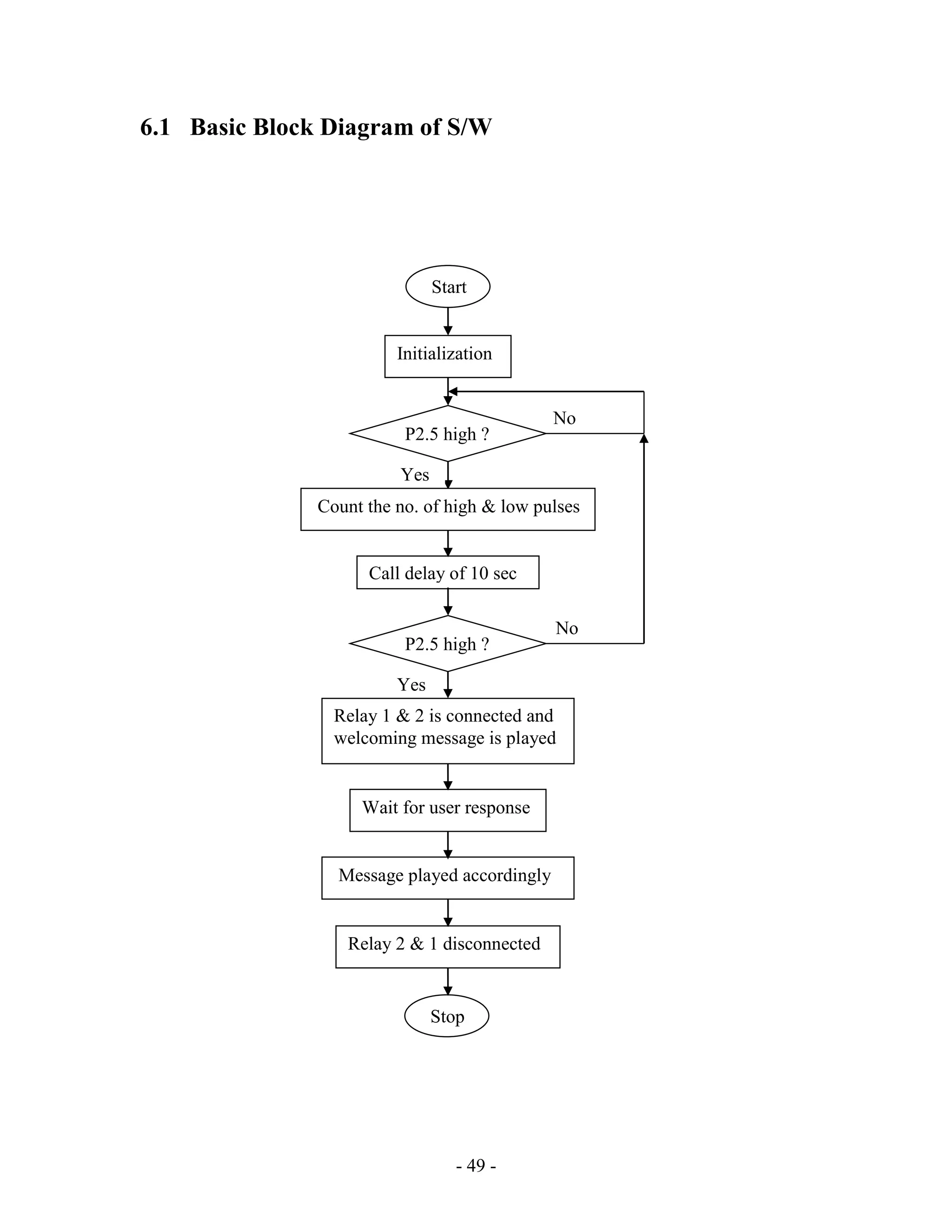
This document is a project report submitted by four students for their Bachelor of Engineering degree. It describes the development of a microcontroller-based interactive voice response system. The system uses a microcontroller and other ICs interfaced to a PC to allow telephone users to access information from a database by following voice prompts. The report includes details of the hardware and software design, component selection, circuit diagrams, programming code and testing procedures. It aims to provide a low-cost alternative to commercial IVR systems for small businesses.