Download to read offline


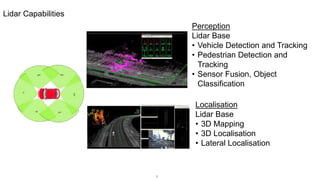


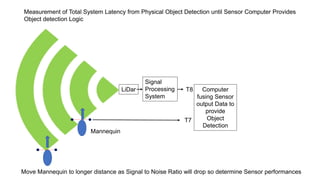


The document discusses sensors used for autonomous vehicles, including lidar. It notes that typical autonomous vehicles use multiple sensors, including 6 lidar sensors for 360 degree detection. Lidar is used for localization, 3D mapping, object detection and tracking. The document discusses testing sensor performance both individually and within the full autonomous vehicle system to measure latency and determine how to reduce braking reaction times to allow for higher traveling speeds. Further testing is proposed under different environmental conditions like rain to evaluate sensor and computer vision module performances.


































































