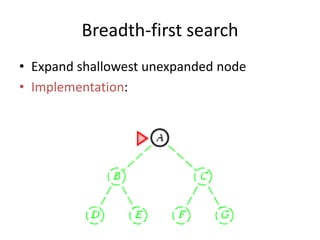
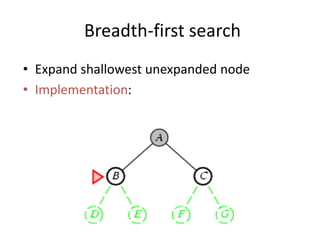
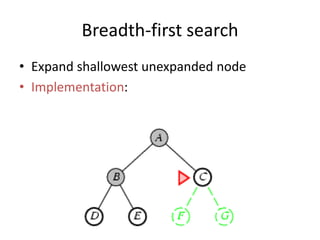
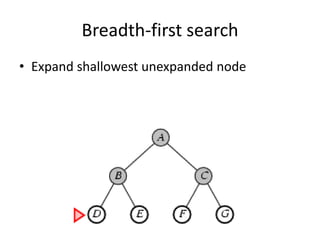
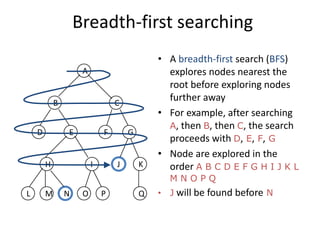
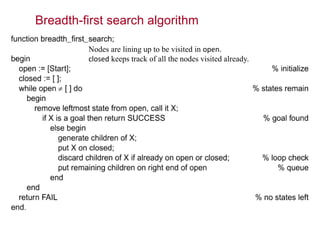
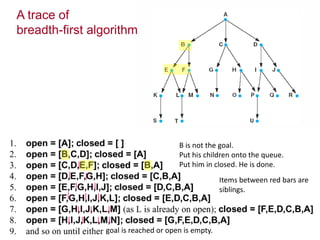
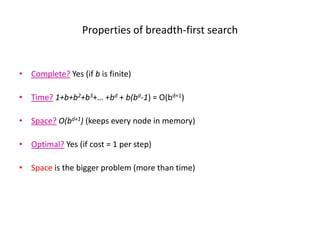
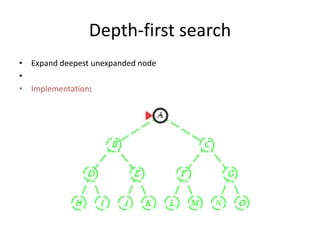
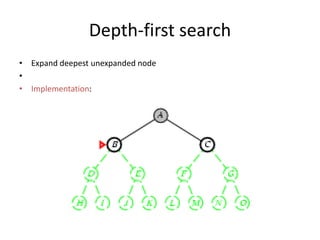
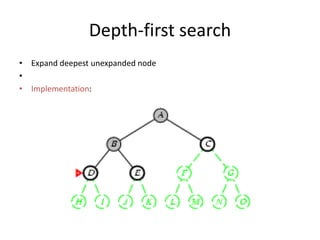
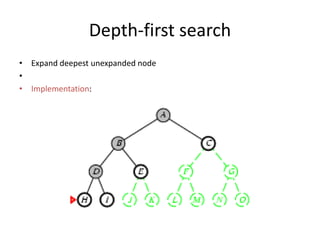
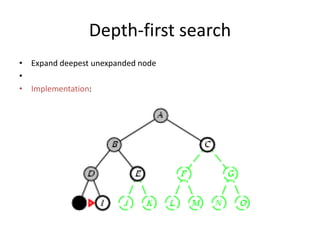
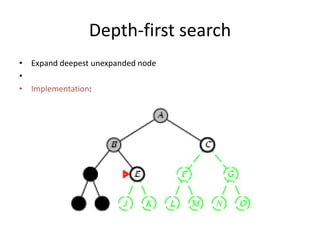
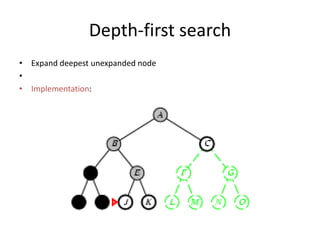
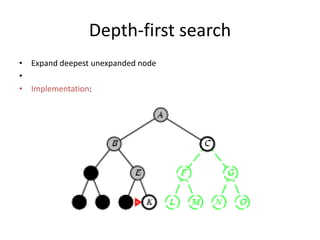
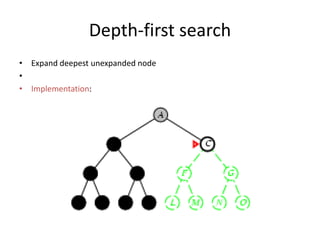
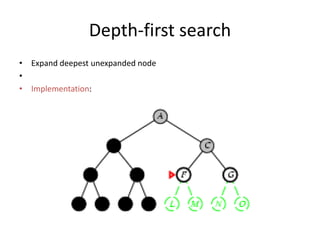
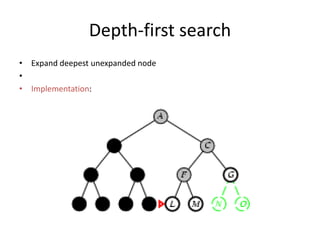
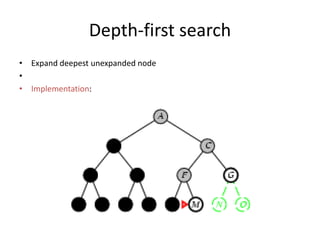
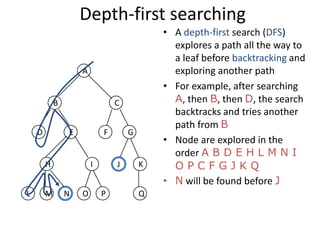
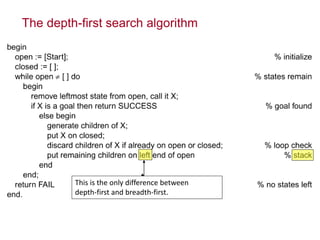
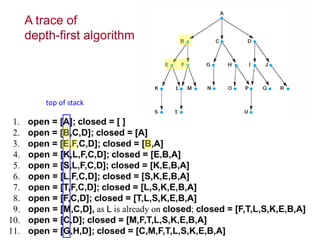
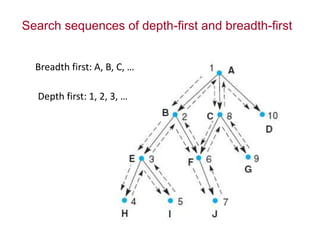
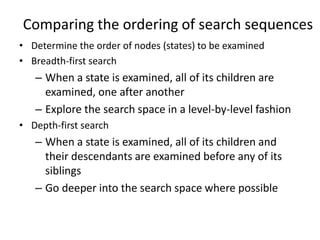
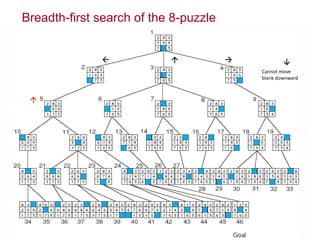
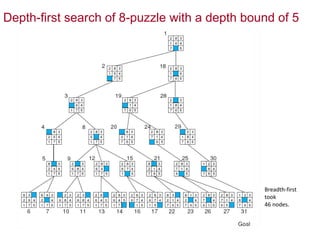
Two main types of search methods are uninformed and informed searches. Uninformed searches like breadth-first, depth-first, and uniform-cost searches use only the problem definition, while informed searches like A* use a heuristic function to estimate solution costs. Breadth-first search expands the shallowest nodes first, while depth-first search expands the deepest nodes first. Both are complete for finite search spaces but breadth-first uses more memory and depth-first may explore inefficient paths first.