組込みLinuxの特徴
• Linuxカーネルに少数のフリーソフトウェアを組み合わせ
たもの
• 組込みCPUアーキテクチャのサポート
•ARM、MIPS、X86など
• RAMや二次記憶装置などの容量が小さい
• 2MB以下のメモリで起動可能
• 組込み機器のアプリケーションや対象ハードウェアに必要
な機能に特化
• MMUユニット※のないCPUでも動作可能(CONFIG_MMU=n)
• シングルプロセッサに最適化可能(CONFIG_SMP=n)
• NANDの直接使用(JFFS2、UBIFS)
• ファイルシステム
• マウント速度が速い(YAFFS2など)
• 読み出し専用(romfs)
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
※MMU:メモリ管理ユニット
0-15
15
17.
組込みLinuxのリアルタイム性能
•ソフトリアルタイム (CONFIG_PREEMPT)
•ハードリアルタイム (CONFIG_PREEMPT_RTpatch set)
•他のカーネルとの組み合わせでリアルタイム性を向上
•RTAI (Adeos+Linux)
•RTLinux (Realtime executive+Linux)
•Linux on ITRON (ITRON+Linux)
•T-Linux (T-Engine+Linux)
•L4-Linux (L4+Linux)
•Litron (TOPPERS/JSPカーネル+Linux)
•Wind River Real-Time Core for Linux (Real-Time
Core+Linux)
参考:http://monoist.atmarkit.co.jp/mn/articles/0501/12/news113.
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-16
16
18.
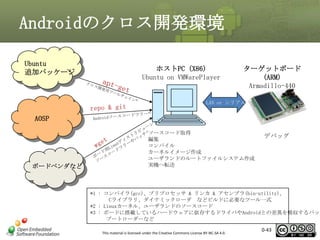
組込みLinuxの開発環境
•一般的なツール
•Eclipse C/C++ DevelopmentTooling (CDT) :EclipseでのCやC++の開発
に必須
•Target Management (RSE)
•Linux Tools Project :プロファイラや動的解析などの機能を統合
•Tools for mobile Linux (TmL)
•EGit :バージョン管理システムの一つ、Gitの統合
•Mylyn :バグトラッカの統合
•特定のOSに特化したEclipseプラグイン
•Moblin Eclipse Plug-in
•Android Development Tools (ADT)
•その他の開発環境
•Qemu:エミュレータ
•distcc、icecc:分散コンパイル用コンパイラ
•専用の商用製品など
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-17
17
19.
組込みLinuxに関わる団体
• Linux Foundation(CE Linux Forumを吸収)
• Linuxオペレーティングシステムの普及をサポートする非営利のコンソー
シアム
• 旧CE Linux Forumが開催する定期的な無料イベント開催
• 日本テクニカルジャンボリー
http://tree.celinuxforum.org/CelfPubWiki/JapanTechnicalJamboreeGuidance
• LiMo Foundation
• Linuxを使った携帯電話のアプリケーション環境の標準化団体
• モトローラ、NEC、パナソニック、サムスン電子、NTTドコモ、ボーダ
フォンなど
• Open Handset Alliance (OHA)
• Googleとともに携帯向けAndroidの開発推進を行うアライアンス
• Open Embedded Software Foundation (OESF)
• 組み込み機器向けAndroidに関わる企業間の協力を目的とした一般社団法
人
• Linaro
• ARMのチップベンダである参加企業の各SoCに最適化されたツール、カー
ネル、ミドルウェアを提供することなどを目的とした非営利団体
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-18
18
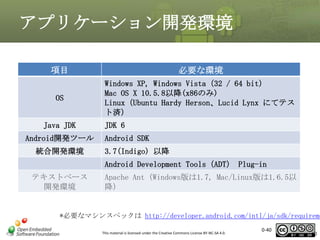
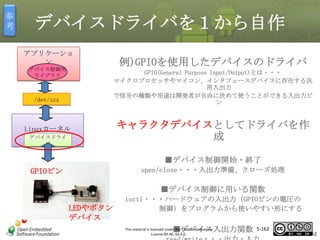
アプリケーション開発環境
項目
必要な環境
OS
Windows XP, WindowsVista(32 / 64 bit)
Mac OS X 10.5.8以降(x86のみ)
Linux(Ubuntu Hardy Herson、Lucid Lynx にてテス
ト済)
Java JDK
Android開発ツール
統合開発環境
JDK 6
Android SDK
3.7(Indigo) 以降
Android Development Tools(ADT) Plug-in
テキストベース
開発環境
Apache Ant(Windows版は1.7, Mac/Linux版は1.6.5以
降)
*必要なマシンスペックは http://developer.android.com/intl/ja/sdk/requireme
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-40
40
42.
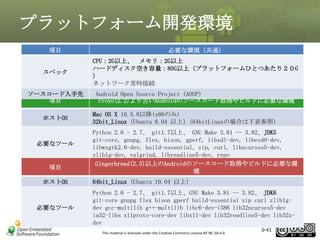
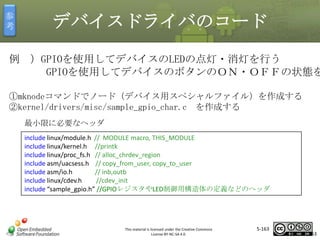
プラットフォーム開発環境
項目
必要な環境(共通)
スペック
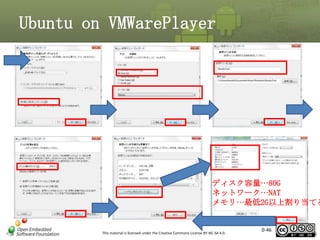
CPU:2G以上、 メモリ:2G以上
ハードディスク空き容量:80G以上(プラットフォームひとつあたり20G
)
ネットワーク常時接続
ソースコード入手先
項目
Android OpenSource Project (AOSP)
Froyo(2.2)より古いAndroidのソースコード取得やビルドに必要な環境
ホストOS
必要なツール
項目
ホストOS
必要なツール
Mac OS X 10.5.8以降(x86のみ)
32bit_Linux(Ubuntu 8.04 以上)(64bitLinuxの場合は下表参照)
Python 2.6 - 2.7、 git1.7以上、 GNU Make 3.81 -- 3.82、JDK5
git-core, gnupg, flex, bison, gperf, libsdl-dev, libesd0-dev,
libwxgtk2.6-dev, build-essential, zip, curl, libncurses5-dev,
zlib1g-dev, valgrind, libreadline5-dev, repo
Gingerbread(2.3)以上のAndroidのソースコード取得やビルドに必要な環
境
64bit_Linux(Ubuntu 10.04 以上)
Python 2.6 - 2.7、 git1.7以上、GNU Make 3.81 -- 3.82、 JDK6
git-core gnupg flex bison gperf build-essential zip curl zlib1gdev gcc-multilib g++-multilib libc6-dev-i386 lib32ncurses5-dev
ia32-libs x11proto-core-dev libx11-dev lib32readline5-dev lib32zdev
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-41
41
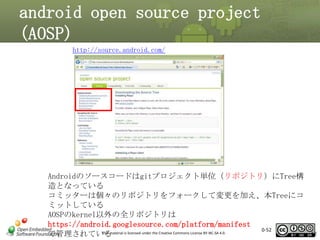
android open sourceproject
(AOSP)
http://source.android.com/
Androidのソースコードはgitプロジェクト単位(リポジトリ)にTree構
造となっている
コミッターは個々のリポジトリをフォークして変更を加え、本Treeにコ
ミットしている
AOSPのkernel以外の全リポジトリは
https://android.googlesource.com/platform/manifest
0-52
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
で管理されている
52
54.
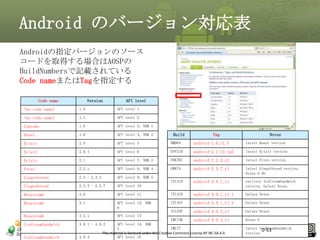
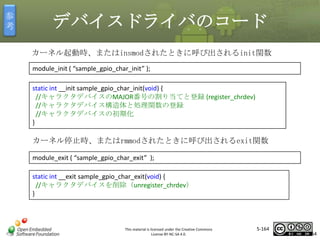
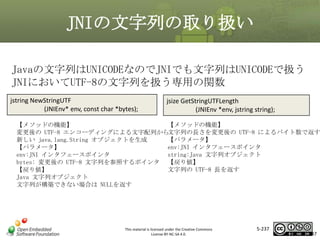
Android のバージョン対応表
Androidの指定バージョンのソース
コードを取得する場合はAOSPの
BuildNumbersで記載されている
Code nameまたはTagを指定する
Codename
Version
API level
(no code name)
1.0
API level 1
(no code name)
1.1
API level 2
Cupcake
1.5
API level 3, NDK 1
Donut
1.6
API level 4, NDK 2
Eclair
2.0
API level 5
DMD64
android-1.6_r1.5
latest Donut version
Eclair
2.0.1
API level 6
EPF21B
android-2.1_r2.1p2
latest Eclair version
Eclair
2.1
API level 7, NDK 3
FRK76C
android-2.2.3_r2
latest Froyo version
Froyo
2.2.x
API level 8, NDK 4
GWK74
android-2.3.7_r1
Gingerbread
2.3 - 2.3.2
API level 9, NDK 5
latest Gingerbread version,
Nexus S 4G
ITL41D
android-4.0.1_r1
Gingerbread
2.3.3 - 2.3.7
API level 10
earliest IceCreamSandwich
version, Galaxy Nexus
Honeycomb
3.0
API level 11
ITL41D
android-4.0.1_r1.1
Galaxy Nexus
Honeycomb
3.1
API level 12, NDK
6
ITL41F
android-4.0.1_r1.2
Galaxy Nexus
ICL53F
android-4.0.2_r1
Galaxy Nexus
Honeycomb
3.2.x
API level 13
IceCreamSandwich
4.0.1 - 4.0.2
IceCreamSandwich
4.0.3
Build
Tag
IML74K
android-4.0.3_r1
API level 14, NDK
IML77
7
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
API level 15
Notes
Nexus S
latest IceCreamSandwich
0-53
version
53
55.
Androidのソースコード管理
(Git)
• Gitとは
– 分散型バージョン管理システム
–複数リポジトリ間での変更履歴のやり取りが可能
– Linux kernelのソースコード管理に利用されている
【gitサーバにあるリポジトリのコピー】
$ git clone https://android.googlesource.com/platform/manifest +
project path
例1:フレームワーク関連の最新のソースコードを取得する場合
$ git clone https://android.googlesource.com/platform/frameworks/base.git
例2:フレームワーク関連のFroyoのソースコードを取得する場合
$ git clone https://android.googlesource.com/platform/frameworks/base.git –b
android-2.2.3_r2
または clone https://android.googlesource.com/platform/frameworks/base.git –b froyo
$ git
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-54
54
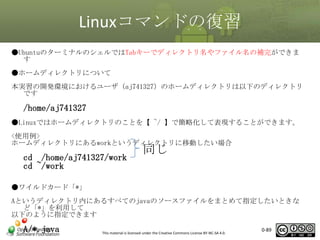
Linuxコマンドの復習
pwd
現在のディレクトリパスを表示
cd
ディレクトリ間移動
cd ../ 一つ前のディレクトリに移動
ls–la
カレントディレクトリのファイルを
一覧表示
-l : ファイルの詳細も示す
-a : .ファイル(隠しファイル)も表示
cp A B
ファイルのコピー
A:コピー元ファイル名 B:コピー先ファイル名
mv A B
ファイルの移動、ファイル名の変更
A:元ファイルファイル名 B;移動先ファイル名
rm A
ファイル、ディレクトリの削除
-r –R :ディレクトリ内の削除
-f :警告メッセージを表示しない
-d:ディレクトリごと削除(スーパーユーザのみ)
mkdir A
ディレクトリの生成
-p:指定したディレクトリをサブディレクトリごと
作成する。ツリー状のディレクトリも作成可能
chmod モード A
パーミッションの変更
Aというファイルをモードで指定したパーミッショ
ンに変更
モード:777(全ユーザにrwxの権限)やa+x(全ユ
ーザに実行権限)
chown usr01 A
chown usr01:g1 A
ファイル所有者の変更
Aの所有者をuser01に変更
Aの所有者をuser01、所属グループg1に変更
-R :ディレクトリとその中野ファイルの所有者を
変更
fdisk
パーティションの作成、削除、変更
mkfs
ファイルシステムの作成(フォー
マット)
-t fstype 作成するファイル・システムを指定する
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-90
92.
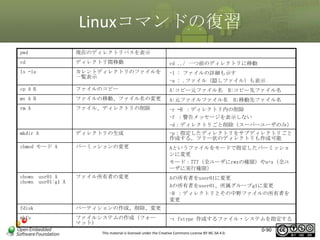
Linuxコマンドの復習
mount A B
ファイルシステムのマウント
AをBにマウントする
umountB
ファイルシステムのアンマウント
Bをアンマウントする
ps
実行中プロセスの情報表示
top
プロセスの稼動状況などのリアルタイム
表示
env
環境変数の表示
export
環境変数の設定
exit
現在のユーザのログアウト
reboot
システムの再起動
sudo
別ユーザでコマンド実行
cat
テキストファイルの内容を閲覧、ファイ
ルの連結
less
ファイルの内容をページ単位で表示
gzip A
gzファイルに圧縮
Aを圧縮する
-d:圧縮ファイルを展開する
tar オプ
ション
A.tar (/A)
アーカイブの作成、展開やtarファイル
の圧縮、解凍
tar cvf A.tar /A:/Aディレクトリ以下をA.tarという名前で
アーカイブする
tar xvf A.tar:A.tarというアーカイブをすべて展開する(
処理経過表示)
ftp
コンピュータ間のファイルの送受信
ftp 192.168.1.11
ping
コンピュータ間の接続状態のテスト
ping 192.168.1.11
export <環境変数名>=<パス>
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-91
KconfigとMakefile
具体例を見てみましょう。
USBメモリの機能を追加するためのパラメータ(オプション名)とそれに関連するドライバ
のソースコードを探す方法です。
USBメモリはストレージ設備(USB Mass Storage)なのでdrivers/usb/storage/ディレク
トリ内のKconfigを見てみます。
configUSB_STORAGE_DATAFAB
bool "Datafab Compact Flash Reader support (EXPERIMENTAL)"
depends on USB_STORAGE && EXPERIMENTAL
help
Support for certain Datafab CompactFlash readers.
Datafab has a web page at <http://www.datafabusa.com/>.
⇒Datafab社製の製品でコンパクトフラッシュリーダーに関連
する機器
config USB_STORAGE_SDDR55
bool "SanDisk SDDR-55 SmartMedia support
(EXPERIMENTAL)"
depends on USB_STORAGE && EXPERIMENTAL
help
Say Y here to include additional code to support
the
Sandisk SDDR-55
SmartMedia reader in the USB Mass Storage driver.
⇒SanDisk社製の製品でスマートメディアカードに関連する機
器
config USB_STORAGE ←USBメモリの機能のオプション
tristate "USB Mass Storage support"
名
depends on USB && SCSI
---help--Say Y here if you want to connect
USB mass storage devices to your
computer's USB port. This is the driver you
need for USB
floppy drives, USB hard disks, USB tape drives,
USB CD-ROMs,
USB flash devices, and memory sticks, along
with
similar devices. This driver may also be used
for
some cameras
and card readers.
This option depends on 'SCSI' support being
enabled,
but you probably also need 'SCSI device
support:
SCSI disk support'
(BLK_DEV_SD) for most USB storage devices.
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-107
To compile this driver as a module, choose M
107
109.
KconfigとMakefile
次にMakefileを見てみます
# Makefile forthe USB Mass Storage device drivers.
# 15 Aug 2000, Christoph Hellwig
# Rewritten to use lists instead of if-statements.
#
EXTRA_CFLAGS
:= -Idrivers/scsi
obj-$(CONFIG_USB_STORAGE)
+= usb-storage.o
usb-storage-obj-$(CONFIG_USB_STORAGE_DEBUG)
usb-storage-obj-$(CONFIG_USB_STORAGE_USBAT)
:
<省略>
usb-storage-obj-$(CONFIG_USB_STORAGE_KARMA)
usb-storage-objs :=
←このオプションに対するモジュール
+= debug.o
+= shuttle_usbat.o
+= karma.o
scsiglue.o protocol.o transport.o usb.o
←scsiglue.c、protocol.c、
initializers.o $(usb-storage-obj-y)transport.c、usb.c、
ifneq ($(CONFIG_USB_LIBUSUAL),)
obj-$(CONFIG_USB)
+= libusual.o
endif
initializers.c及びこれらと
同名のヘッダファイルがモ
ジュールの実体
であることがわかります
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-108
108
110.
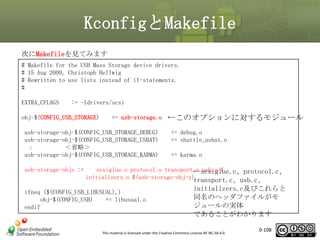
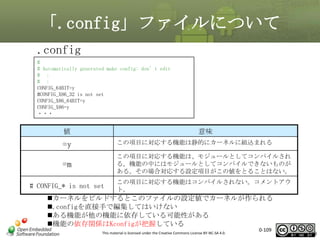
「.config」ファイルについて
.config
#
# Automatically generatedmake config: don’t edit
# :
# :
CONFIG_64BIT=y
#CONFIG_X86_32 is not set
CONFIG_X86_64BIT=y
CONFIG_X86=y
・・・
値
意味
=y
この項目に対応する機能は静的にカーネルに組込まれる
=m
この項目に対応する機能は、モジュールとしてコンパイルされ
る。機能の中にはモジュールとしてコンパイルできないものが
ある。その場合対応する設定項目がこの値をとることはない。
# CONFIG_* is not set
この項目に対応する機能はコンパイルされない。コメントアウ
ト。
カーネルをビルドするとこのファイルの設定値でカーネルが作られる
.configを直接手で編集してはいけない
ある機能が他の機能に依存している可能性がある
機能の依存関係はKconfigが把握している
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-109
109
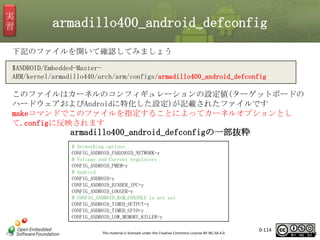
armadillo400_android_defconfig
# #MX25 Options
#
CONFIG_MACH_ARMADILLO420=y
CONFIG_MACH_ARMADILLO440=y
##Armadillo-400 Board options
#
# CONFIG_ARMADILLO400_GPIO_A_B_GPIO is not set
CONFIG_ARMADILLO400_GPIO_A_B_I2C=y
# CONFIG_ARMADILLO400_GPIO_A_B_KEY is not set
CONFIG_ARMADILLO400_GPIO_C_D_GPIO=y
# CONFIG_ARMADILLO400_GPIO_C_D_I2C is not set
## Select wakeup source
#
CONFIG_ARMADILLO400_UART2_WAKE_SRC_SELECT=y
# CONFIG_ARMADILLO400_UART3_WAKE_SRC_SELECT is not set
# CONFIG_ARMADILLO400_UART5_WAKE_SRC_SELECT is not set
CONFIG_ARMADILLO400_TOUCHSCREEN_WAKE_SRC_SELECT=y
CONFIG_ARMADILLO400_TOUCHSCREEN_IS_WAKE_SRC=1
CONFIG_ARMADILLO400_GPIO_KEYS_WAKE_SRC_SELECT=y
CONFIG_ARMADILLO400_GPIO_KEYS_IS_WAKE_SRC=1
CONFIG_UTMI_MXC=y
# #Mapping drivers for chip access
#
CONFIG_MTD_ARMADILLO=y
# #Display device support
#
CONFIG_LOGO=y
CONFIG_LOGO_ARMADILLO_CLUT224=y
## System on Chip audio support
#
CONFIG_SND_SOC=y
CONFIG_SND_MXC_SOC=y
CONFIG_SND_MXC_SOC_SSI=y
CONFIG_SND_SOC_ARMADILLO440_WM8978=y
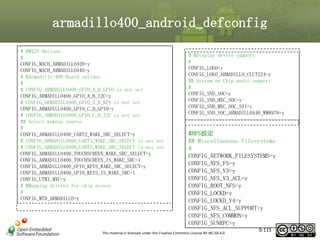
#NFS設定
## Miscellaneous filesystems
#
CONFIG_NETWORK_FILESYSTEMS=y
CONFIG_NFS_FS=y
CONFIG_NFS_V3=y
CONFIG_NFS_V3_ACL=y
CONFIG_ROOT_NFS=y
CONFIG_LOCKD=y
CONFIG_LOCKD_V4=y
CONFIG_NFS_ACL_SUPPORT=y
CONFIG_NFS_COMMON=y
CONFIG_SUNRPC=y
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-115
115
117.
参
考
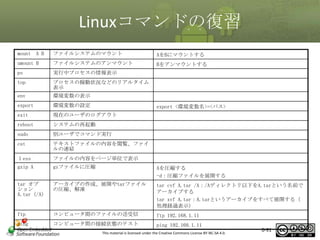
makeコマンド関連
[host_pc~] > make
カーネルのコンパイルをする。ソースツリーのルートディレクトリで実行。
[host_pc~]> make␣modules_install
コンパイルされたモジュールを/lib/modulesにインストール。
[host_pc~] > make␣install
カーネルバイナリイメージを/boot以下にインストールされる。
Fedora系ではブート時初期化ファイルシステムイメージも作成される。
[host_pc~] > update-initramfs␣–c␣–k␣<カーネルバージョン
>
Debian系においてブート時初期化ファイルシステムイメージも作成する際に使用するコマンド
ファイルまたはディレクトリ名
内容
/lib/modules/<カーネルバージョン>/
モジュールが配置されるディレクトリ
/boot/vmlinuz-<カーネルバージョン>
カーネルイメージファイル
/boot/initramfs-<カーネルバージョン> または
/boot/initrd.img-<カーネルバージョン>
ブート時初期化用ファイルシステムイメージ
/boot/Systemmap-<カーネルバージョン>
アドレス情報ファイル
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-116
116
実
習
microSDのパーティションと初期化
パーティションのイメージ
mmcblk0p1
FAT 1-100M
mmcblk0p2
microSD
4G
ext3
残り全部の容量
[armadillo ~]# fdisk␣/dev/mmcblk0
The number of cylinders for this disk is set to 30656.
There is nothing wrong with that, but this is larger than 1024,
and could in certain setups cause problems with:
1) software that runs at boot time (e.g., old versions of LILO)
2) booting and partitioning software from other OSs
(e.g., DOS FDISK, OS/2 FDISK)
Command (m for help): d //削除コマンド
Selected partition 1 //パーティション1を指定(不要なパーティションが残っていた
場合念のため削除)
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-130
130
132.
実
習
microSDのパーティションと初期化
Command (m forhelp): n //新規パーティション追加コマンド
Command action
e
extended
p
primary partition (1-4)
p //パーティション
Partition number (1-4): 1 //パーティション1を選択
First cylinder (1-30656, default 1): リターン(default 1) //シリンダの開始値
Using default value 1
Last cylinder or +size or +sizeM or +sizeK (1-30656, default 30656): +100M //シ
リンダの終了値
Command (m for help): n //新規パーティション追加コマンド
Command action
e
extended
p
primary partition (1-4)
p //パーティション
Partition number (1-4): 2 //パーティション2を選択
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-131
131
133.
実
習
microSDのパーティションと初期化
First cylinder (3054-30656,default 3054):リターン(default 3054 ) //シリンダの開
始値
Using default value 3054
Last cylinder or +size or +sizeM or +sizeK (3054-30656, default 30656): ):
リターン(default 30656 ) //シリンダの終了値
Using default value 30656
Command (m for help): w //パーティション作成実行して終了
The partition table has been altered!
Calling ioctl() to re-read partition table.
mmcblk0: p1 p2
mmcblk0: p1 p2
Syncing disks.
[armadillo ~] # mkdosfs␣/dev/mmcblk0p1
↑パーティション1(データ保存領域) はWindowsとのデータ交換を考え
てDOS用
ファイルシステムFATでフォーマット
[armadillo ~] # mke2fs␣-j␣/dev/mmcblk0p2
↑パーティション2(Android ユーザーランド領域) はEXT3 でフォー
マット
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-132
132
実
習
製品版Linuxのrebootとkermit切断
[armadillo ~] #reboot
[armadillo ~] #
System is going down for system reboot now.
Starting local stop scripts.
Exiting Syslogd!
Syncing all filesystems:
done
Unmounting all filesystems:
done
The system is going down NOW !!
Sending SIGTERM to all processes.
Please stand by while rebooting the system.
Hermit-At v2.0.8 (armadillo4x0) compiled at 15:29:17, Nov 12 2010
hermit> <ctrl+→ctrl+c> //ショートカットキー
(Back at ubuntu-vm)
---------------------------------------------------(/home/aj741327/) C-Kermit>q
Closing /dev/ttyUSB0...OK
[host_pc~] >
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-135
135
実
習
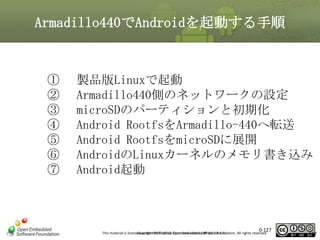
Androidを起動しましょう
[host_pc~] > cd
[host_pc~]> kermit
C-Kermit起動 &
接続
C-Kermit> c
Armadilloにシリアル
hemit> setenv␣console=ttymxc1␣root=/dev/mmcblk0p2␣init=/init␣noinitrd␣rootwait
hermit> setenv
カーネル起動パラメータ設定
確認
1: console=ttymxc1
&
2: root=/dev/mmcblk0p2
3: init=/init
4: noinitrd
5: rootwait
hermit> boot
起動
Uncompressing
カーネルスター
kernel....................................................................................................
ト
........done.
Doing console=ttymxc1
Doing root=/dev/mmcblk0p2
Linuxカーネルのバージョン
Doing init=/init
ARMのアーキテクチャ
Doing noinitrd
Doing rootwait
Linux version 2.6.26-at7 (unknown) (aj741327@ubuntu-vm) (gcc version 4.4.0 (GCC) ) #1 PREEMPT Tue Feb 15
14:50:35 JST 2011
0-137
CPU: ARM926EJ-S [41069264] revision 4 (ARMv5TEJ), cr=00053177
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
137
139.
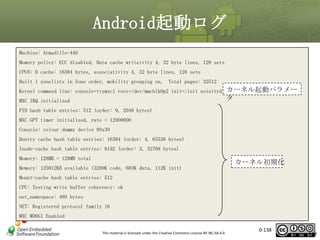
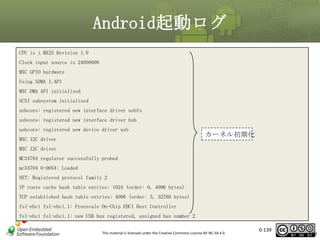
Android起動ログ
Machine: Armadillo-440
Memory policy:ECC disabled, Data cache writeivity 4, 32 byte lines, 128 sets
CPU0: D cache: 16384 bytes, associativity 4, 32 byte lines, 128 sets
Built 1 zonelists in Zone order, mobility grouping on.
Total pages: 32512
カーネル起動パラメー
Kernel command line: console=ttymxc1 root=/dev/mmcblk0p2 init=/init noinitrd rootwait
タ
MXC IRQ initialized
PID hash table entries: 512 (order: 9, 2048 bytes)
MXC GPT timer initialized, rate = 12000000
Console: colour dummy device 80x30
Dentry cache hash table entries: 16384 (order: 4, 65536 bytes)
Inode-cache hash table entries: 8192 (order: 3, 32768 bytes)
Memory: 128MB = 128MB total
Memory: 125912KB available (3200K code, 683K data, 112K init)
カーネル初期化
Mount-cache hash table entries: 512
CPU: Testing write buffer coherency: ok
net_namespace: 480 bytes
NET: Registered protocol family 16
MXC WDOG1 Enabled
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-138
138
140.
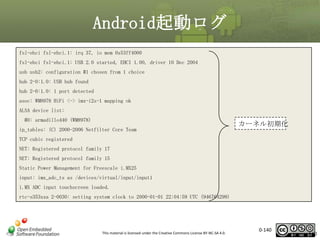
Android起動ログ
CPU is i.MX25Revision 1.0
Clock input source is 24000000
MXC GPIO hardware
Using SDMA I.API
MXC DMA API initialized
SCSI subsystem initialized
usbcore: registered new interface driver usbfs
usbcore: registered new interface driver hub
usbcore: registered new device driver usb
MXC I2C driver
カーネル初期化
MXC I2C driver
MC34704 regulator successfully probed
mc34704 0-0054: Loaded
NET: Registered protocol family 2
IP route cache hash table entries: 1024 (order: 0, 4096 bytes)
TCP established hash table entries: 4096 (order: 3, 32768 bytes)
fsl-ehci fsl-ehci.1: Freescale On-Chip EHCI Host Controller
fsl-ehci fsl-ehci.1: new USB bus registered, assigned bus number 2
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-139
139
141.
Android起動ログ
fsl-ehci fsl-ehci.1: irq37, io mem 0x53ff4000
fsl-ehci fsl-ehci.1: USB 2.0 started, EHCI 1.00, driver 10 Dec 2004
usb usb2: configuration #1 chosen from 1 choice
hub 2-0:1.0: USB hub found
hub 2-0:1.0: 1 port detected
asoc: WM8978 HiFi <-> imx-i2s-1 mapping ok
ALSA device list:
#0: armadillo440 (WM8978)
ip_tables: (C) 2000-2006 Netfilter Core Team
カーネル初期化
TCP cubic registered
NET: Registered protocol family 17
NET: Registered protocol family 15
Static Power Management for Freescale i.MX25
input: imx_adc_ts as /devices/virtual/input/input1
i.MX ADC input touchscreen loaded.
rtc-s353xxa 2-0030: setting system clock to 2000-01-01 22:04:59 UTC (946764299)
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-140
140
142.
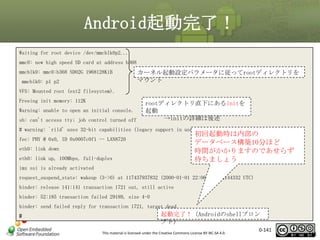
Android起動完了!
Waiting for rootdevice /dev/mmcblk0p2...
mmc0: new high speed SD card at address b368
mmcblk0: mmc0:b368 SD02G 1968128KiB
mmcblk0: p1 p2
カーネル起動設定パラメータに従ってrootディレクトリを
マウント
VFS: Mounted root (ext2 filesystem).
Freeing init memory: 112K
Warning: unable to open an initial console.
sh: can't access tty; job control turned off
rootディレクトリ直下にあるinitを
起動
→initの詳細は後述
# warning: `rild' uses 32-bit capabilities (legacy support in use)
初回起動時は内部の
データベース構築10分ほど
時間がかかりますのであせらず
待ちましょう
fec: PHY @ 0x0, ID 0x0007c0f1 -- LAN8720
eth0: link down
eth0: link up, 100Mbps, full-duplex
imx ssi is already activated
request_suspend_state: wakeup (3->0) at 117437937832 (2000-01-01 22:06:54.852144332 UTC)
binder: release 141:141 transaction 1721 out, still active
binder: 52:185 transaction failed 29189, size 4-0
binder: send failed reply for transaction 1721, target dead
#
起動完了!(Androidのshellプロン
プト)
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-141
141
143.
実
習
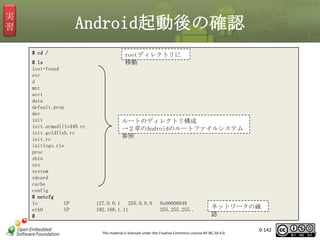
Android起動後の確認
# cd /
#ls
lost+found
etc
d
mnt
acct
data
default.prop
dev
init
init.armadillo440.rc
init.goldfish.rc
init.rc
initlogo.rle
proc
sbin
sys
system
sdcard
cache
config
# netcfg
lo
UP
eth0
UP
#
rootディレクトリに
移動
ルートのディレクトリ構成
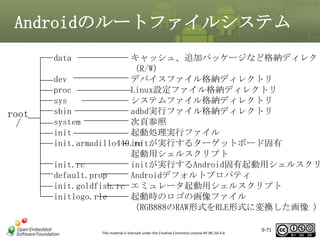
→2章のAndroidのルートファイルシステム
参照
127.0.0.1
255.0.0.0
192.168.1.11
0x00000049
255.255.255..
ネットワークの確
0x00001043
認
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-142
142
144.
メモ
This material islicensed under the Creative Commons License BY-NC-SA 4.0.
0-143
143
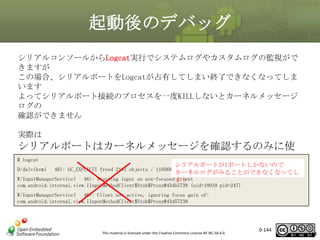
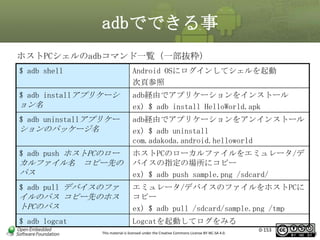
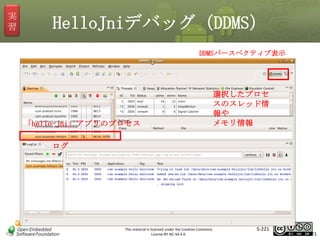
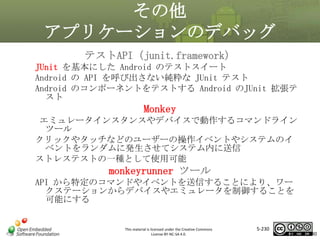
ADBデバッグ
ADB (Android DebugBridge)やDDMS (Dalvik Debug Monitor
Server )を使用すればグラフィカルなログ表示や開発用PCの
シェルからデバッグ、アプリケーションのインストール・ア
ンインストールなどが可能になります
シリアルではなく
ネットワーク経由
DDMS
コマンド類
she
ll
goldfish
(エミュレー
タ)
Android SDK
ADT on
Eclipse
adbd
ターゲットボード
dalvikVM
開発用PC
adbd
adbサーバ
DDMS
グラフィカ
ル
ツール
shell
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-145
145
147.
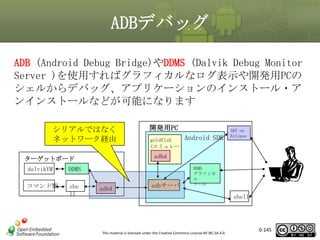
ADBデバッグをするために
Android SDK
1. ADBデバッグツールはAndroid
SDKのtoolsに含まれている
⇒ホストPCにAndroidSDKを
インストールする必要が
ある
開発用PC
192.168.1.10
192.168.1.11
2. ターゲットボードのadbdと開
発用PCのadbサーバの通信はリ
モート接続が必要
⇒Armadillo440で動作して
いるAndroidに固定IPアド
レス
を設定する必要がある
⇒環境変数ADBHOSTにター
ゲットボードのIPアドレ
0-146
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
146
148.
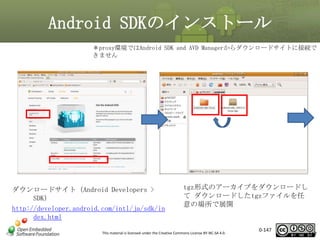
Android SDKのインストール
*proxy環境ではAndroid SDKand AVD Managerからダウンロードサイトに接続で
きません
ダウンロードサイト(Android Developers >
SDK)
http://developer.android.com/intl/ja/sdk/in
dex.html
tgz形式のアーカイブをダウンロードし
て ダウンロードしたtgzファイルを任
意の場所で展開
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-147
147
149.
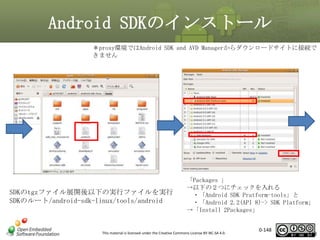
Android SDKのインストール
*proxy環境ではAndroid SDKand AVD Managerからダウンロードサイトに接続で
きません
SDKのtgzファイル展開後以下の実行ファイルを実行
SDKのルート/android-sdk-linux/tools/android
「Packages 」
→以下の2つにチェックを入れる
・「Android SDK Pratform-tools」と
・「Android 2.2(API 8)-> SDK Platform」
→「Install 2Packages」
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-148
148
150.
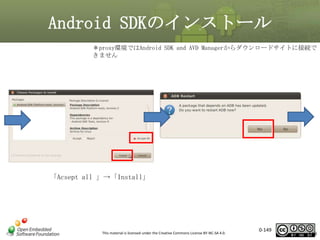
Android SDKのインストール
*proxy環境ではAndroid SDKand AVD Managerからダウンロードサイトに接続で
きません
「Acsept all 」→「Install」
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-149
149
151.
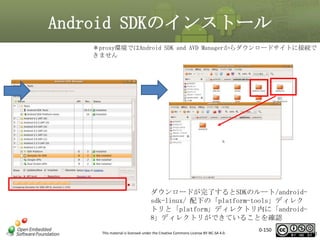
Android SDKのインストール
*proxy環境ではAndroid SDKand AVD Managerからダウンロードサイトに接続で
きません
ダウンロードが完了するとSDKのルート/androidsdk-linux/ 配下の「platform-tools」ディレク
トリと「platform」ディレクトリ内に「android8」ディレクトリができていることを確認
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-150
150
参
考
KconfigとMakefileの設定
例 )
kernel/drivers/misc/Kconfig
config SAMPLE_GPIO_CHAR
bool“Sample GPIO CHAR for LED and User Button”
default n
---help--if you use GPIO for LED and User Button
マスタ タイトルの書式設定
例 )
kernel/drivers/misc/Makefile
obj-$(CONFIG_SAMPLE_GPIO_CHAR)
+=sample_gpio_char.o
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-166
166
168.
参
考
ドライバの組込み/モジュール生成
前頁の例で作ったドライバをカーネルに組み込む
$ make menuconfig//設定GUI起動
# DeviceDrivers -> Misc Devices
#
-> [*]Sample GPIO CHAR for LED and User
Button
$ make
マスタ タイトルの書式設定
前頁の例で作ったドライバをモジュール(sample_gpio_char.ko)
にする
$ make menuconfig //設定GUI起動
#DeviceDrivers -> Misc Devices
#
-> [M]Sample GPIO CHAR for LED and User
Button
$ make modules
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-167
167
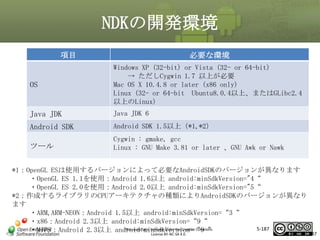
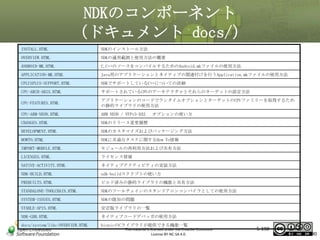
NDKの開発環境
項目
OS
必要な環境
Windows XP (32-bit)or Vista (32- or 64-bit)
→ ただしCygwin 1.7 以上が必要
Mac OS X 10.4.8 or later (x86 only)
Linux (32- or 64-bit Ubuntu8.0.4以上、またはGLibc2.4
以上のLinux)
マスタ タイトルの書式設定
Java JDK
Java JDK 6
Android SDK
Android SDK 1.5以上(*1,*2)
ツール
Cygwin : gmake, gcc
Linux : GNU Make 3.81 or later 、GNU Awk or Nawk
*1:OpenGL ESは使用するバージョンによって必要なAndroidSDKのバージョンが異なります
・OpenGL ES 1.1を使用:Android 1.6以上 android:minSdkVersion="4“
・OpenGL ES 2.0を使用:Android 2.0以上 android:minSdkVersion="5“
*2:作成するライブラリのCPUアーキテクチャの種類によりAndroidSDKのバージョンが異なり
ます
・ARM,ARM-NEON:Android 1.5以上 android:minSdkVersion=“3“
・x86:Android 2.3以上 android:minSdkVersion=“9“
5-187
This material is licensed under the Creative Commons
・MIPS:Android 2.3以上 android:minSdkVersion=“9“
License BY-NC-SA 4.0.
187
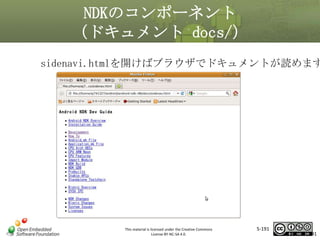
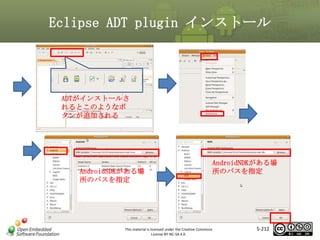
Eclipse ADT pluginインストール
マスタ タイトルの書式設定
①eclipse実行
②Workspace
「/home/aj741327/workspace」
③Java開発用パースペクティブを開
く
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-209
209
211.
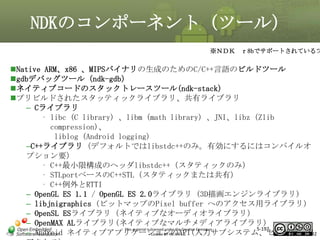
Eclipse ADT pluginインストール
マスタ タイトルの書式設定
Eclipseメニュー->Help->Install New
Software
両方にチェックを付
ける
https://dlssl.google.com/android/eclipse/is licensed under the Creative Commons
This material
License BY-NC-SA 4.0.
5-210
212.
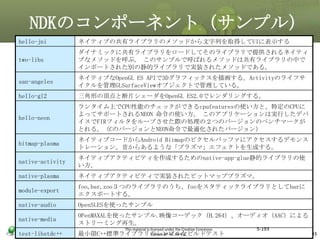
Eclipse ADT pluginインストール
「I accept・・・」に
チェック
マスタ タイトルの書式設定
セキュリティ警告⇒O
K
CDT(C/C++開発用Eclipseプラ
グイン)も自動でインストー
ルされた状態で起動される
Welcomeタブは×ボタンで閉じ
る
Eclipse 再起動
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-211
213.
Eclipse ADT pluginインストール
ADTがインストールさ
れるとこのようなボ
タンが追加される
マスタ タイトルの書式設定
AndroidSDKがある場
所のパスを指定
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
AndroidNDKがある場
所のパスを指定
5-212
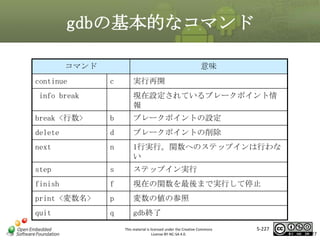
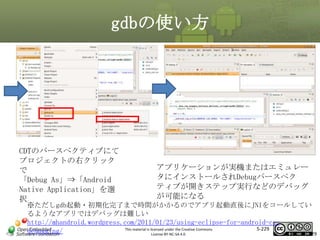
gdbの使い方
• コマンドラインからgdbを使う
① 「ndk-build–B NDK_DEBUG=1」 でビルドする
② アプリケーションのAndroidManifest.xmlの
debuggable属性をtrueにしてapkを作成する
③ デバッグ対象のアプリケーションをエミュレータか
実機で起動
④ アプリケーションのプロジェクトのルート直下で
「ndk-gdb --start」を実行
⑤ gdb起動、初期化後(gdb)プロンプトが出現
マスタ タイトルの書式設定
※ただしgdb起動・初期化完了まで時間がかかるのでアプリ起動直後にJNIを
コールしているようなアプリではデバッグは難しい
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-226
226
実
習
製品版Linuxのrebootとkermit切断
[armadillo ~] #reboot
[armadillo ~] #
System is going down for system reboot now.
Starting local stop scripts.
Exiting Syslogd!
Syncing all filesystems:
done
Unmounting all filesystems:
done
The system is going down NOW !!
Sending SIGTERM to all processes.
Please stand by while rebooting the system.
Hermit-At v2.0.8 (armadillo4x0) compiled at 15:29:17, Nov 12 2010
hermit> <ctrl+→ctrl+c> //ショートカットキー
(Back at ubuntu-vm)
---------------------------------------------------(/home/aj741327/) C-Kermit> q
Closing /dev/ttyUSB0...OK
[host_pc~] >
マスタ タイトルの書式設定
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-281
281
283.
実
習
デバイスを組み込んだAndroid用カーネルを書き込む
【接続環境】
開発用PC ⇔ Armadillo-440(RS232Cケーブル)
JP2ショート状態(hermit起動モード)
カンペ⇒14_演習用Androidブート手順.txt
#Armadillo440用の標準カーネルをAndroidのLinuxカーネルで上書きします
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/kernel/armadillo440
[host_pc~] > hermit␣download␣--input-file␣linux_training_ensyu.bin.gz␣--
マスタ タイトルの書式設定
region␣kernel␣
--port␣/dev/ttyUSB0
Armadillo-440
NOR Flashメモリ(32M)
開発用PC
bootloader
ブートローダ領域(Hermit)
Android対応kernel
hermit
Linuxカーネル領域
Armadillo用
ブートローダ兼ダウンロー
ダ
userland
Linuxユーザランド領域
config
Linuxカーネルパラメータ保存領域
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-282
282
284.
実
習
デバイスを組み込んだ新Androidで起動
【接続環境】
開発用PC ⇔ Armadillo-440(RS232Cケーブル)
JP2ショート状態(hermit起動モード)
開発用PC
カンペ⇒14_演習用Androidブート手順.txt
[armadillo]hermit>
setenv␣console=ttymxc␣root=/dev/mmcblk0p2␣init=/init␣noinitrd␣ rootwait
[armadillo] hermit> boot
C-Kermit
シリアル通信ソ
フト
マスタ タイトルの書式設定
Armadillo-440
NOR Flashメモリ(32M)
linux_training_ensyu.b
in.gzをRAMにロードして
実行
組み込み済み
bootloader
ブートローダ領域(Hermit)
SDカード内の
Androidで起動
Android対応kernel
/dev/mmcblk0
microSD
Linuxカーネル領域
userland
Androidの
ルートファイル
システム
/dev/mmcblk0p2
Linuxユーザランド領域
config
Linuxカーネルパラメータ保存領域
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
新Androidが起動
5-283
283
285.
実
習
新Android起動後の確認事項
【接続環境】
ここでは
作業用PC ⇔ Armadillo-440(RS232Cケーブル)
から下記に変更する
開発用PC⇔ Armadillo-440(LANケーブル)
ネットワーク設定の確認をします
[Android] # netcfg
lo UP
127.0.0.1
255.0.0.0
eth0
UP
192.168.1.11
マスタ タイトルの書式設定
0x00000049
255.255.255.0. 0x00001043
※上記のIPアドレスが設定されていない場合は「ifconfig eth0 192.168.1.11」を手
打ち
で実行して設定してください。
IPアドレスの設定確認終了後
①ckermitでの接続を切断(Androidのプロンプトで[ctrl+→ctrl+c] ⇒
[q])
②RS232CケーブルをArmadilloからはずす
③LANケーブルで開発用PCと接続
④開発用PCのコマンドプロンプトからpingを投げてネットワークの接続の確
認
5-284
This material is licensed under the Creative Commons
⑤adb shell 起動
License BY-NC-SA 4.0.
284
参
考
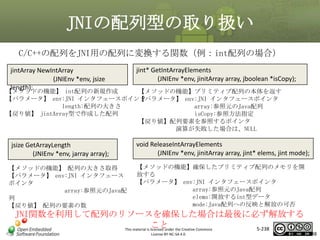
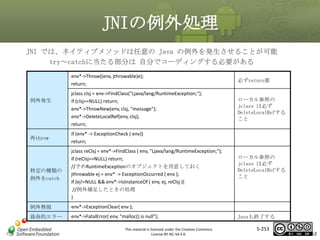
JNIメソッドを一括登録する
Javaでネイティブ定義されたメソッドをJNIで認識させるためには
メソッドの命名規則を守って手動で記述したり、javahコマンドを
使って自動でヘッダファイルを作成する方法がありますが、メ
ソッド名が長く可読性が低くなります。
package com.sample.hellojni;
public classHelloJni {
static {
System.loadLibrary(“hellojni");
}
マスタ タイトルの書式設定
public native int openComm(String str, boolean debug);
public native void closeComm();
public native int getBaudrate();
public native boolean setParams(int i, int j, int k , int n);
public native int commWrite(byte b[], int off, int len);
public static native void setObject(new SomeObject());
public static native void stopTread();
定義されたネイティブメ
ソッドが多くなるにつれ
て、JNI側のコードが見難
くなるので、JNI側のコー
ドを見やすくするための
工夫が必要
メソッドを一括登録でき
るようにする
}
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-331
331

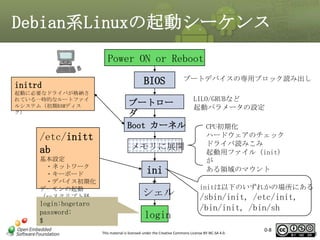






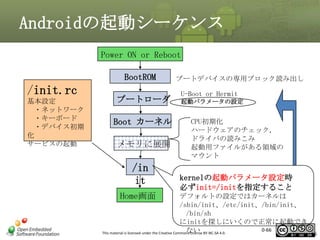
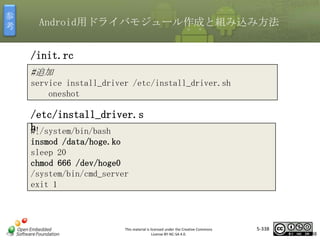
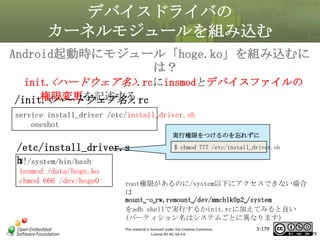
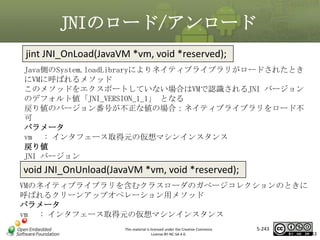
![Androidのinit
• initの起点
– /system/core/init/init.c の main関数
• init.rc
– Android Init Languageで書かれた起動用スクリプト
– Action、Command、Service、Optionで構成
– /system/core/init/readme.txt で説明
ACTION部
on <target>
<command>
<command>
:
SERVICE部
service <name> <path> [argument]*
<option>
<option>
:
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-69
69](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-70-320.jpg)
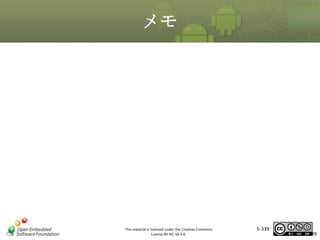
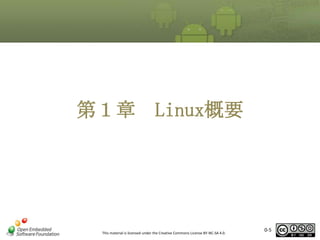
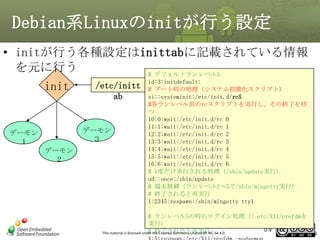
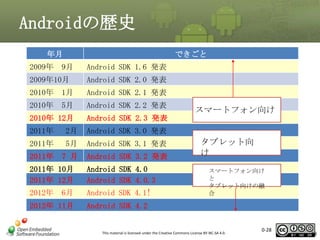
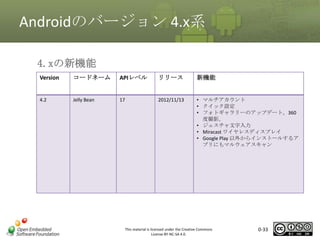
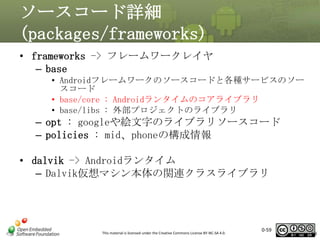
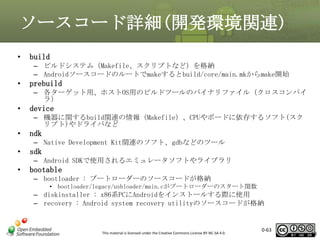
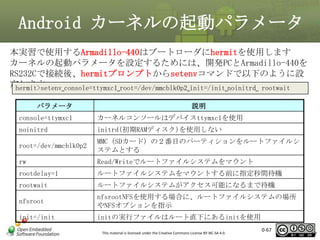
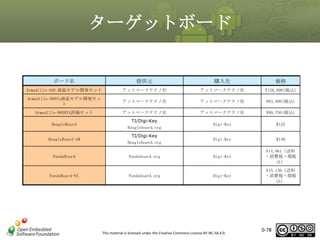
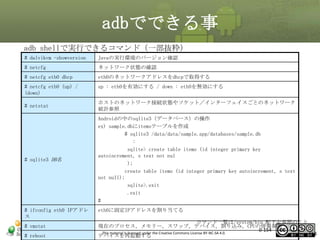
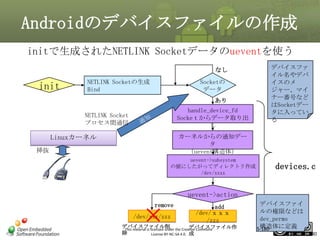
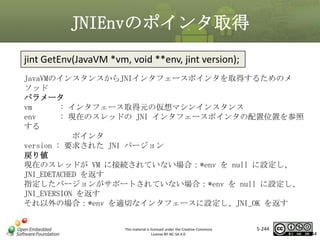
![各種ターゲットボード
ボード名
CPU
メモリ
画面
通信
I/F
ストレー
ジ
カメラ
オーディオ
Armadillo-440
液晶モデル開発
セット
Freescale
i.MX257
400MHz
(ARM9)
32MB
(FLASH NOR)
128MB
(LPDDR SDRAM)
4.3イ
ンチタ
ッチパ
ネル
Eth×1
シリアル、
USB
microSD
-
オーディオ入
出力
Armadillo-500fx
液晶モデル開発
セット
Freescale i.MX31
532MHz
(ARM11)
32MB(FLASH NOR)
128MB(DDR SDRAM)
1G(USBSSD)
5.7イ
ンチタ
ッチパ
ネル
Eth×1
シリアル、
USB、操作ボ
タン
SD/MMC+mic
roSD
-
オーディオ入
出力
Armadillo-800EVA
評価キット
ルネサス
[R-Mobile A1]
800MHz 2コア
ARM Cortex-A9
512MB
(DDR SDRAM)
8G(eMMC)
5イン
チタッ
チパネ
ル
(静電
式)
Eth×1
WLAN
シリアル
USB HOST/OTG
HDMI
SD/MMC+mic
roSD
CMOSカメ
ラモジュ
ール
オーディオ入
出力
BeagleBoard
TI OMAP3530
600MHz
(ARM11)
256MB
NAND
DDR2 RAM
-
-
シリアル、
USB
SD/MMC
-
オーディオ入
出力
BeagleBoard-xM
TI DM3730
1.0GHz
(ARM Cortex-A8)
512MB
NAND
DDR2 RAM
-
Eth×1
シリアル、
USB
microSD
拡張端子
オーディオ入
出力
PandaBoard
TI OMAP4430
1GHz 2コア
ARM Cortex-A9
1GB
DDR2 RAM
-
Eth×1
BT2.1+EDR
WLAN
シリアル
USB HOST/OTG
HDMI、DIV-D
SD/MMC
拡張端子
オーディオ入
出力
PandaBoard-ES
TI OMAP4460
1.2GHz 2コア
ARM Cortex-A9
1GB
DDR2 RAM
-
Eth×1
BT2.1+EDR
WLAN
シリアル
USB HOST/OTG
HDMI、DIV-D
SD/MMC
拡張端子
オーディオ入
出力
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-77](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-78-320.jpg)

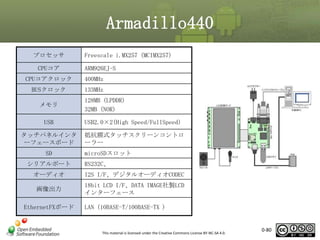
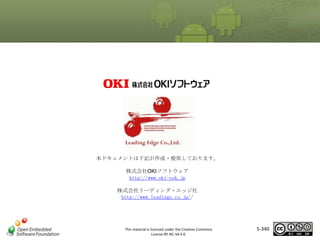
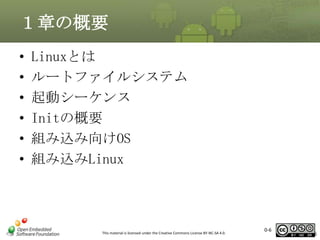
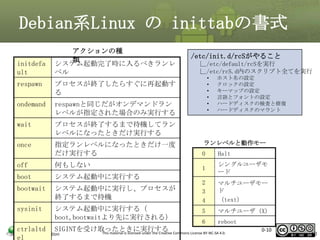
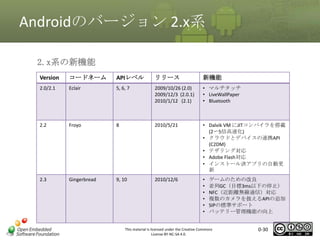
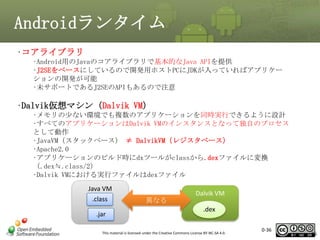
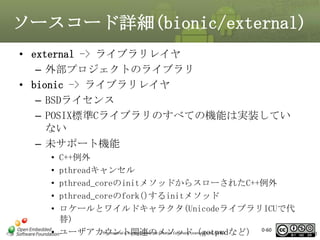
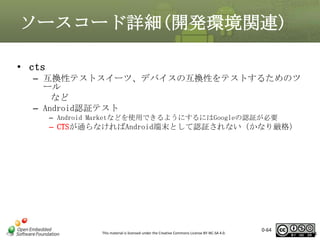
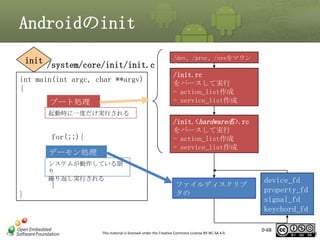
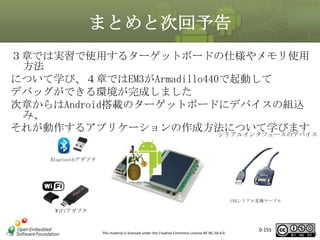
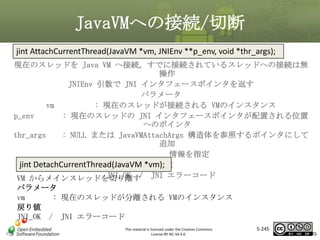
![Armadillo440-通常Linux
開発用PC
カーネルの起動パラメータ
[armadillo] hermit> clearenv
[armadillo] hermit> setenv
[armadillo] hermit> boot
シリアル通信ソフ
ト
NOR Flashメモリ(32M)
linux-440.bin.gz
をRAMにロードして実行
bootloader
ブートローダ領域(Hermit)
kernel
Linuxカーネル領域
userland
Linuxユーザランド領域
linux-romfs440をマウント
各プロセスの実行
config
Linuxカーネルパラメータ保存領域
通常Linuxが起動
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-81
81](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-82-320.jpg)
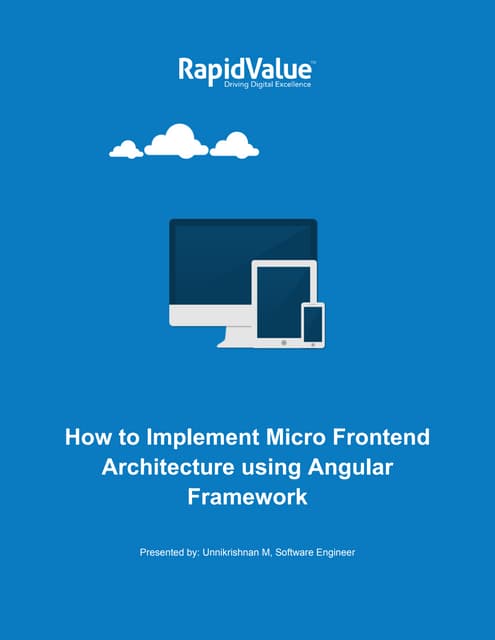
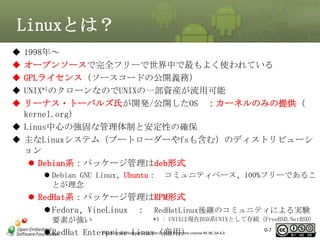
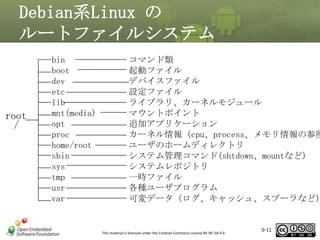
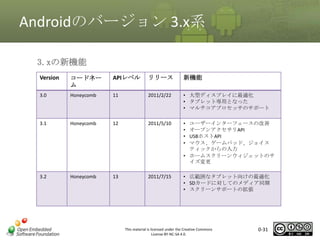
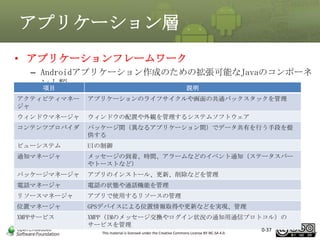
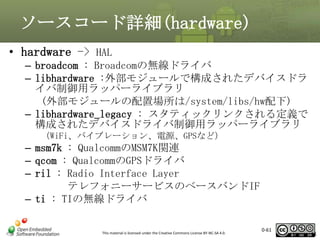
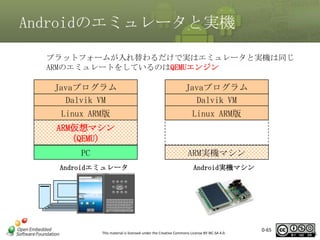
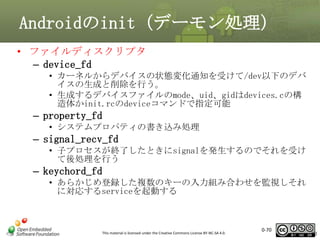
![参
考
Armadillo440-Androidデバッグ時
(NFSブート)
開発用PC
カーネルの起動パラメータ
[armadillo] hermit>
setenv␣console=ttymxc0,␣115200␣root=/dev/nfs␣rw␣nfsroot=192.16
8.1.10:/home/mydoroid/out/target/product/genelic/root␣init=/i
nit␣ip=102.168.1.11␣noinitrd
[armadillo] hermit> boot
NOR Flashメモリ(32M)
linux-440android.bin.gzをRAMに
ロードして実行
シリアル通信ソ
フト
Androidユーザランド
android-rootfs
192.168.1.1
0
bootloader
ブートローダ領域(Hermit)
Android対応kernel
Linuxカーネル領域
linux-440-android.bin
userland
Linuxユーザランド領域
config
Linuxカーネルパラメータ保存領域
NFSルートマウント
root=/dev/nfs
マウント
各プロセスの実行
Androidが起動
LAN接続
192.168.1.11
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-82](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-83-320.jpg)
![Armadillo440-Androidデバッグ時
(microSDブート)
開発用PC
カーネルの起動パラメータ
[armadillo] hermit>
setenv␣console=ttymxc1␣root=/dev/mmcblk0p2␣init=/init␣noinitr
d␣rootwait
[armadillo] hermit> boot
シリアル通信ソフ
ト
NOR Flashメモリ(32M)
linux-440-android.bin.gz
をRAMにロードして実行
組み込み済み
bootloader
ブートローダ領域(Hermit)
Android対応kernel
ルートマウント
root=/dev/mmcblk0p2
マウント
各プロセスの実行
Linuxカーネル領域
linux-440-android.bin
userland
/dev/mmcblk0
microSD
Android /dev/mmcblk0p2
rootfs
Linuxユーザランド領域
config
Androidが起動
Linuxカーネルパラメータ保存領域
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-83](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-84-320.jpg)
![Armadillo440-Android
製品イメージ
開発用PC
カーネルの起動パラメータ
[armadillo] hermit>
clearenv
[armadillo] hermit> boot
シリアル通信ソフ
ト
NOR Flashメモリ(32M)
linux-440-android.bin.gz
をRAMにロードして実行
組み込み済み
bootloader
ブートローダ領域(Hermit)
Android対応kernel
Linuxカーネル領域
linux-440-android.bin
Androidのルートをマウント
各プロセスの実行
Androidが起動
/dev/mmcblk0
/dev/mmcblk0p1
マウント
Android
/system(RO)
Androidルート
Root(RO)
config
microSD
/dev/mmcblk0p2
マウント
Android
/dara(RW)
Linuxカーネルパラメータ保存領域
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-84](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-85-320.jpg)


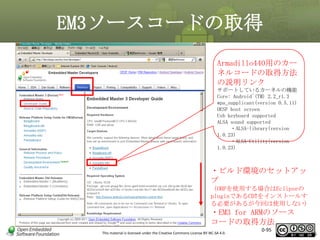
![EM3ソースコードの取得
[host_pc~]
[host_pc~]
[host_pc~]
[host_pc~]
[host_pc~]
>
>
>
>
>
cd␣~work
mkdir␣v2_armadillo440-training
export␣ANDROID=~/work/v2_armadillo440-training
cd␣$ANDROID
git␣clone␣git://github.com/OESF/Embedded-Master-
ARM.git
:
Resolving deltas: 100% (136625/136625), done.
Checking out files: 100% (257515/257515), done.
:
[host_pc~] > cd␣Embedded-Master-ARM/
[host_pc~] > ls
core i5 メモリ
1.5G
ubuntu on vmware
90分くらい
Makefile build development frameworks linaro packages sdk
bionic
cts
device
hardware
ndk
pms
system
bootable dalvik external
kernel
opb
prebuilt vendor
タグで正確にEM3を取得するにはgit clone終了後以下を実行
[host_pc~] > cd␣Embedded-Master-ARM
[host_pc~] > git␣checkout␣-b␣EM3␣refs/tags/EmbeddedMaster-3.1.0
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-96
96](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-97-320.jpg)
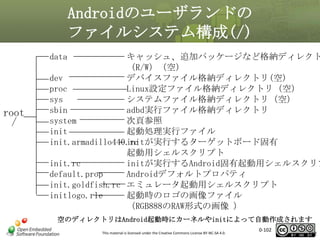
![Androidのユーザランドのビルド
core i5 メモリ
1.5G
ubuntu on vmware
120分くらい
// Androidユーザランドのビルド
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/
[host_pc~] > echo␣"TARGET_PRODUCT:=armadillo440"␣>␣buildspec.mk
[host_pc~] > make␣-j2
2012年5月23日現在ビルドエラーが発生します。
packages/apps配下の下記フォルダを削除することでビルドエラーの発生を回避できま
OesfAndroidSystemMonitor
OesfNaviCoopAppCarIcon
OesfNaviCoopAppPoiDest
OesfNaviCoop_PluginNavi_CoopAppRoute
OesfSystemMonitorExample
OesfMonitorLogGraphicView
OesfNaviCoopAppDispArea
OesfNaviCoop_PluginNavi_CoopAppDisplay
OesfNaviCoop_PluginNavi_CoopAppStatus
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-97
97](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-98-320.jpg)
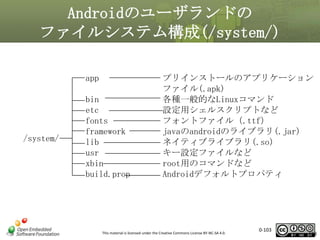
![実
習
ユーザランドのファイルシステム作成
カンペ⇒01_ユーザランドのファイルシステム作
成.txt
[host_pc~] > cd␣$ANDROID
[host_pc~] > mkdir␣-p␣android-root
・・・①
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/out/target/product/armadillo440
[host_pc~] > cp␣-Rdpf␣root/*␣$ANDROID/android-root
・・・②
[host_pc~] > cp␣-Rdpf␣system/* $ANDROID/android-root/system/
・・・③
[host_pc~]
[host_pc~]
[host_pc~]
[host_pc~]
[host_pc~]
>
>
>
>
>
cd␣$ANDROID/android-root
sudo␣chown␣-R␣root.root␣.
・・・④
sudo␣chmod␣777␣-R␣system/usr/keychars
・・・⑤
sudo␣chmod␣777␣-R␣system/usr/keylayout
・・・⑤
sudo␣chmod␣777␣system/etc/dhcpcd/dhcpcd-run-hooks ・・・⑤
①v2_armadillo440-trainingフォルダ直下に「android-root」というフォルダを作成
②$ANDROID/Embedded-Master-ARM/out/target/product/armadillo440/root/以下のすべてのファイルや
フォルダを「android-root」フォルダにコピー
③$ANDROID/Embedded-Master-ARM/out/target/product/armadillo440/system/以下のすべてのファイル
やフォルダを「android-root/system」フォルダにコピー
④「android-root」フォルダにroot権限を付与
⑤system/usr/keychars、system/usr/keylayout(ハードキーのバインド設定ファイル類)と
system/etc/dhcpd//dhcpcd-run-hooksに実行権限を付与する
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-98
98](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-99-320.jpg)
![実
習
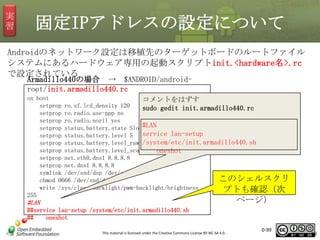
固定IPアドレス設定
カンペ⇒02_固定IPアドレス設
定.txt
//Androidのネットワーク設定ファイルに固定IPアドレスを設定しておく
[host_pc~] > cd␣$ANDROID/android-root
[host_pc~] > cd␣system/etc
[host_pc~] > sudo␣gedit␣init.armadillo440.sh
gedit起動、編集
#!/system/bin/sh
netcfg eth0 up
netcfg eth0 dhcp
#!/system/bin/sh
ifconfig␣eth0␣192.168.1.11
保存してgedit終了
//実行権限をつける
[host_pc~] > sudo␣chmod␣a+x init.armadillo440.sh
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-100
100](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-101-320.jpg)
![実
習
Androidファイルシステムの完成
カンペ⇒03_ファイルシステムの完
成.txt
//Androidユーザランドのファイルシステムをアーカイブにする
[host_pc~] > cd␣$ANDROID/android-root
[host_pc~] > tar␣cvzf␣$ANDROID/rootfs_a_training.tar.gz .
[host_pc~] > cd␣$ANDROID
[host_pc~] > ls
[host_pc~] > rootfs_a_training.tar.gz␣android-root␣EmbeddedMaster-ARM
ユーザランドのファイルシステム
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-101
101](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-102-320.jpg)
![実
習
Androidカーネルの作成
カンペ⇒04_カーネルの作成.txt
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/kernel/armadillo440
[host_pc~] > make␣ARCH=arm␣CROSS_COMPILE=$ANDROID/Embedded-MasterARM/prebuilt/linux-x86/toolchain/arm-eabi-4.4.3/bin/arm-eabi␣armadillo400_android_defconfig ・・・①
[host_pc~] > make␣ARCH=arm␣CROSS_COMPILE=$ANDROID/Embedded-MasterARM/prebuilt/linux-x86/toolchain/arm-eabi-4.4.3/bin/arm-eabi- ・・・②
//カーネルのイメージファイル作成
[host_pc~] > gzip␣-c␣arch/arm/boot/Image␣>␣linux_training.bin.gz
①カーネルのコンフィギュレーションファイル
(armadillo400_android_defconfig)に記載してある設
定を.configに適用
②arm-eabi-というクロスコンパイラでカーネルをコンパ
イル
③イメージファイルをgzipで圧縮
Androidのカーネルイメー
ジ
※①②は実習時間短縮のためすでに実行済みなのでオブ
ジェクトファイルなどはできています。
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-104
104](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-105-320.jpg)
![参
考
menuconfigの操作方法
↑
項目の選択カーソルを上に移動
項目の選択カーソルを下に移動
<TAB> 、← 、→
動作メニュー(
Select/Exit/Help)を切り替え
<Enter>
選択されている動作メニューに
応じて動作を行う
y
項目を<*>(有効:静的組込み)
n
項目を<>無効にする
m
項目を<M>(有効:モジュール
としてコンパイルする)
<SPACE>
<Exit>→
「新しい設定を保存するか?」
→
YES→.configに保存
動作
↓
[host_pc~] > make␣menuconfig
キー
項目を<M>/<*>/<>のトグルで切
り替える
<ESC><ESC>
上の階層に戻る(<Exit>と同じ
)
?
選択されている項目に関するヘ
ルプを表示(<Help>と同じ)
設定項目を検索する。設定項目
/
のシンボル名からメニュー上の
0-112
位置を探す場合に便利
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
112](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-113-320.jpg)
![参
考
makeコマンド関連
[host_pc~] > make
カーネルのコンパイルをする。ソースツリーのルートディレクトリで実行。
[host_pc~] > make␣modules_install
コンパイルされたモジュールを/lib/modulesにインストール。
[host_pc~] > make␣install
カーネルバイナリイメージを/boot以下にインストールされる。
Fedora系ではブート時初期化ファイルシステムイメージも作成される。
[host_pc~] > update-initramfs␣–c␣–k␣<カーネルバージョン
>
Debian系においてブート時初期化ファイルシステムイメージも作成する際に使用するコマンド
ファイルまたはディレクトリ名
内容
/lib/modules/<カーネルバージョン>/
モジュールが配置されるディレクトリ
/boot/vmlinuz-<カーネルバージョン>
カーネルイメージファイル
/boot/initramfs-<カーネルバージョン> または
/boot/initrd.img-<カーネルバージョン>
ブート時初期化用ファイルシステムイメージ
/boot/Systemmap-<カーネルバージョン>
アドレス情報ファイル
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-116
116](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-117-320.jpg)
![参
考
mekeコマンド関連
[host_pc~] > make␣clean
ソースツリーをコンパイル前に戻す。オブジェクトファイルは削除される
が.configやコンパイル時に生成された一部ファイルは削除されない。
[host_pc~] > make␣help
使用可能なmakeターゲットを表示する。
[host_pc~] > make␣<dir>/<file>.o
指定したオブジェクトファイルを生成するのに必要なコンパイルだけを行う。
<dir>だけを指定した場合は、 .config によって生成されることになっている
そのディレクトリ内すべてのオブジェクトファイルが生成される。
[host_pc~] > make␣<dir>/<file>.ko
指定したモジュールだけを生成する
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-117
117](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-118-320.jpg)
![makeコマンド(クロスコンパイル)
クロスコンパイルに必要な変数
変数
意味
ARCH
ターゲットアーキテクチャ
CROSS_COMPILE
クロスコンパイラのプレフィックスを指定
[host_pc~] > make␣ARCH=arm CROSS_COMPLIE=armv5tel-linux-␣uImage
クロスコンパイラarmv5tel-linux-gccによってARM向けのカーネルをクロスコンパイルする。
生成するカーネルのバイナリイメージはuImage形式がよく使われる。
arch/arm/boot/uImageとして生成される。
[host_pc~] > make␣ARCH=arm CROSS_COMPLE=armv5tel-linux-␣modules
クロスコンパイラarmv5tel-linux-gccによってARM向けのカーネルモジュールをクロスコン
パイルで生成する。
[host_pc~] > make␣ARCH=arm CROSS_COMPLE=armv5tel-linux-␣
INSTALL_MOD_PATH=~/armroot-2.6.38␣modules_install
ホームディレクトリに~/armroot-2.6.38/lib/modulesというディレクトリが生成されその
下にクロスコンパイルで生成されたモジュールがインストールされる。
シンボリックリンク(build、source)->カーネルがコンパイルされたソースツリーをさす。
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-118
118](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-119-320.jpg)
![実
習
コンフィギュレーションの確認
makeコマンドやmake menuconfigでカーネルコンフィギュレーション値
が反映されたか確認する場合は
•方法1:「.config」をlessで確認(実習)
•方法2:make menuconfigコマンドでGUIから確認(参考)
// 方法1:カーネルの設定(.configへの適用)を確認する
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/kernel/armadillo440
[host_pc~] > less␣config
lessで開いて検索( 「/」キーのあとにキーワードを入れてリターン)し設定が反映され
ているかを確認する
# Voltage and Current regulators
CONFIG_ANDROID_PMEM=y
#Android
CONFIG_ANDROID=y
CONFIG_ANDROID_BINDER_IPC=y
CONFIG_ANDROID_LOGGER=y
など
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-119
119](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-120-320.jpg)
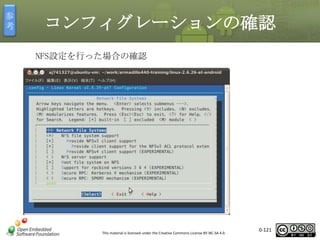
![参
考
コンフィギュレーションの確認
//方法2:make menuconfigコマンドでGUIから確認
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/kernel/
[host_pc~] > make menuconfig
Androidに特化したカーネルオプションの確認
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-120
120](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-121-320.jpg)
![実習の開発環境まとめ
開発用PC
【実習用のAndroidソースコードのrootパス】
/home/aj741327/work/v2_armadillo440-training/Embedded-Master-ARM
【Android用Linuxカーネルのソースコードのrootパス】
/home/aj741327/work/v2_armadillo440-training/EmbeddedMasterARM/kernel
【環境変数】
[host_pc~]
> export␣ANDROID=/home/aj741327/work/v2_armadillo440-
training
Android
kernelイメージ
$ANDROID/Embedded-MasterARM/kernel/armadillo440/linux_training.bin.gz
Androidユーザラン
ドのファイルシステ $ANDROID/rootfs_a_training.tar.gz
ム
Armadillo440製品版Linux
kernelイメージ
~/work/atmark/linux-a400-1.06.bin.gz
ユーザランドイメー
ジ
~/work/atmark/romfs-a440-1.04.img.gz
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-124
124](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-125-320.jpg)
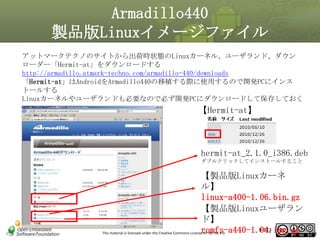
![ダウンローダ:Hermitについて
開発用PCにRS232Cの端子がない場合はUSB-RS232C変換ケーブ
ルを使用してUSBで接続してください
開発用PC
hermit
Armadillo用
ブートローダ兼ダウンロー
ダ
# 開発PCからイメージファイルをArmadilloにダウンロードするダウンローダとして使用す
る
# (例)atmarktechno製のLinuxカーネルイメージをarmadilloのフラッシュメモリに書き
込む
[host_pc~] > cd␣~/work/atmark
[host_pc~] > hermit␣download␣--input-file␣linux-a400-1.06.bin.gz␣--region␣kernel␣--
port␣ /dev/ttyUSB0
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-125
125](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-126-320.jpg)
![ブートローダ:Hermitについて
開発用PCにRS232Cの端子がない場合はUSB-RS232C変換
ケーブルを使用してUSBで接続してください
JP2ショート状態
(hermit起動モー
ド)
開発用PC
【C-Kermitの使い方】
*ホームディレクトリで起動させる
こと
Armadillo440
hermit
Armadillo用
ブートローダ兼ダウンロー
ダ
C-Kermit
シリアル通信ソ
フト
起動
接続
ヘルプ
切断
c
終了
# シリアル通信ソフトを介してarmadilloのブートローダーに接続する
kermit
c
?
ctrl + ctrl +
q
[host_pc~] > kermit
← C-Kermit起動
Executing /home/aj741327/.mykermrc...
?SET SPEED has no effect without prior SET LINE
C-Kermit 8.0.211, 10 Apr 2004, for Linux
Copyright (C) 1985, 2004,
Trustees of Columbia University in the City of New York.
Type ? or HELP for help.
(/home/aj741327/) C-Kermit>c
← ターゲット(armadillo-440)にシ
リアル接続
[armadillo] hermit>
ンプトが表示(接続済み) This material is licensed under the Creative Commons License BY-NC-SA 4.0.
← armadilloのhermitプロ
0-126
126](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-127-320.jpg)
![製品版Linuxで起動してみよう
JP2をショート
C-Kermit
シリアル通信ソフ
ト
カンペ⇒05_製品版Linuxのブート手
順.txt
1.JP2をショートにする
2.シリアルケーブルでPCとArmadillo-440を接続する
3.LANケーブルでPCとArmadillo-440を接続する
4.Micro SDカード(1G以上)をスロットに挿入して電源を入
れる
5.C-Kermit起動(前頁参照)
6.Armadillo440の起動
microSD
実
習
hermit> clearenv //起動パラメータをク
リア
1G以上のmicroSD
hermit> boot //起動コマンド
Armadillo-440は出荷時状態です
Armadillo440用の標準カーネル
と標準ユーザランドが載っていま
す
・・・・起動ログが流れます
login : root //ログイン名入力
password : root //パスワード入力
[root@armadillo440-0 (ttymxc1) ~]# //起動
完了
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-128
128](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-129-320.jpg)
![実
習
Armadillo440側のネットワークの設定
作業PC側のネットワーク設定
ip:192.168.1.10
subnet:255.255.255.0
カンペ⇒06_製品版Linuxのネットワーク設
定.txt
192.168.1.10
[armadillo ~] # vi␣/etc/config/interfaces
#␣/etc/network/interfaces␣--␣configuration␣file␣for␣ifup(8),␣ifdown(8)
auto␣lo␣eth0
iface␣lo␣inet␣loopback
iface␣eth0␣inet␣static
address␣192.168.1.11
netmask␣255.255.255.0
network␣192.168.1.0
broadcast␣192.168.1.255
gateway␣192.168.1.1
viで編集
192.168.1.11
[armadillo
[armadillo
[armadillo
[armadillo
[armadillo
~]
~]
~]
~]
~]
#
#
#
#
#
cd␣/etc/config
flatfsd␣–s //コンフィギュレーション領域に保存
ifdown␣eth0
ifup␣eth0
ifconfig //確認
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-129
129](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-130-320.jpg)
![実
習
microSDのパーティションと初期化
パーティションのイメージ
mmcblk0p1
FAT 1-100M
mmcblk0p2
microSD
4G
ext3
残り全部の容量
[armadillo ~] # fdisk␣/dev/mmcblk0
The number of cylinders for this disk is set to 30656.
There is nothing wrong with that, but this is larger than 1024,
and could in certain setups cause problems with:
1) software that runs at boot time (e.g., old versions of LILO)
2) booting and partitioning software from other OSs
(e.g., DOS FDISK, OS/2 FDISK)
Command (m for help): d //削除コマンド
Selected partition 1 //パーティション1を指定(不要なパーティションが残っていた
場合念のため削除)
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-130
130](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-131-320.jpg)
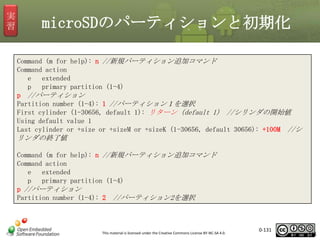
![実
習
microSDのパーティションと初期化
First cylinder (3054-30656, default 3054):リターン(default 3054 ) //シリンダの開
始値
Using default value 3054
Last cylinder or +size or +sizeM or +sizeK (3054-30656, default 30656): ):
リターン(default 30656 ) //シリンダの終了値
Using default value 30656
Command (m for help): w //パーティション作成実行して終了
The partition table has been altered!
Calling ioctl() to re-read partition table.
mmcblk0: p1 p2
mmcblk0: p1 p2
Syncing disks.
[armadillo ~] # mkdosfs␣/dev/mmcblk0p1
↑パーティション1(データ保存領域) はWindowsとのデータ交換を考え
てDOS用
ファイルシステムFATでフォーマット
[armadillo ~] # mke2fs␣-j␣/dev/mmcblk0p2
↑パーティション2(Android ユーザーランド領域) はEXT3 でフォー
マット
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-132
132](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-133-320.jpg)
![実
習
Android RootfsをArmadillo-440へ転送
開発PC
armadillo440
/home/ftp/pub/
FTP
rootfs_a_training.tar.gz
192.168.1.11
カンペ⇒07_Android RootFSのFTP転送.txt
192.168.1.10
$ANDROIDの有効化
[host_pc~] > export ANDROID=~/work/v2_armadillo440-train
[host_pc~] > cd␣$ANDROID
[host_pc~] > ftp␣192.168.1.11
login name:ftp
login password:なし
ftp> cd␣pub
ftp> bin
ftp> put␣rootfs_a_training.tar.gz
ftp> bye
[host_pc~] >
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-133
133](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-134-320.jpg)
![実
習
Android RootfsをmicroSDに展開
Armadillo440の/home/ftp/pubからAndroidのユーザラ
ンドのファイルシステムをmicroSDカードのパーティ
ション2(mmcblk0p2)に展開します
カンペ⇒08_Android RootFSをmicroSDに展開.txt
[armadillo ~] # mount␣/dev/mmcblk0p2 /mnt
//microSDのパーティション2
にマウント
[armadillo ~] # cd␣/home/ftp/pub
のある場所へ
[armadillo ~] # mv␣rootfs_a_training.tar.gz␣/mnt/.
//ftpで転送したRootfs
//マウント配下にRootfsを
移動
//マウントディレ
[armadillo ~] # cd␣/mnt
クトリへ
[armadillo ~] # tar␣xzvf rootfs_a_training.tar.gz
[armadillo ~] # rm␣–rf␣lost+found
[armadillo ~] # rm␣–rf rootfs_a_training.tar.gz
[armadillo ~] # cd␣..
// Rootfsを展開
//不要なフォルダの削除
//tarファイルも削除
//マウント
ディレクトリから抜ける
[armadillo ~] # umount␣/mnt
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
//アンマウント
0-134
134](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-135-320.jpg)
![実
習
製品版Linuxのrebootとkermit切断
[armadillo ~] # reboot
[armadillo ~] #
System is going down for system reboot now.
Starting local stop scripts.
Exiting Syslogd!
Syncing all filesystems:
done
Unmounting all filesystems:
done
The system is going down NOW !!
Sending SIGTERM to all processes.
Please stand by while rebooting the system.
Hermit-At v2.0.8 (armadillo4x0) compiled at 15:29:17, Nov 12 2010
hermit> <ctrl+→ctrl+c> //ショートカットキー
(Back at ubuntu-vm)
---------------------------------------------------(/home/aj741327/) C-Kermit>q
Closing /dev/ttyUSB0...OK
[host_pc~] >
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-135
135](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-136-320.jpg)
![実
習
AndroidのLinuxカーネルをフラッシュROMに書き込む
Armadollo-440
開発用PC
hermit
Armadillo用
ブートローダ兼ダウンローダ
Androidのユーザランドの
ルートファイルシステム
が入っています
Armadillo440用の標準カーネル
をAndroidのLinuxカーネルで上書きしま
す
カンペ⇒09_Androidブート手順.txt
# Armadillo440用の標準カーネルをAndroidのLinuxカーネルで上書きします
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/kernel/armadillo440
[host_pc~] > hermit␣download␣--input-file␣linux_training.bin.gz␣--region␣kernel␣
--port␣/dev/ttyUSB0
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-136
136](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-137-320.jpg)
![実
習
Androidを起動しましょう
[host_pc~] > cd
[host_pc~] > kermit
C-Kermit起動 &
接続
C-Kermit> c
Armadilloにシリアル
hemit> setenv␣console=ttymxc1␣root=/dev/mmcblk0p2␣init=/init␣noinitrd␣rootwait
hermit> setenv
カーネル起動パラメータ設定
確認
1: console=ttymxc1
&
2: root=/dev/mmcblk0p2
3: init=/init
4: noinitrd
5: rootwait
hermit> boot
起動
Uncompressing
カーネルスター
kernel....................................................................................................
ト
........done.
Doing console=ttymxc1
Doing root=/dev/mmcblk0p2
Linuxカーネルのバージョン
Doing init=/init
ARMのアーキテクチャ
Doing noinitrd
Doing rootwait
Linux version 2.6.26-at7 (unknown) (aj741327@ubuntu-vm) (gcc version 4.4.0 (GCC) ) #1 PREEMPT Tue Feb 15
14:50:35 JST 2011
0-137
CPU: ARM926EJ-S [41069264] revision 4 (ARMv5TEJ), cr=00053177
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
137](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-138-320.jpg)
![実
習
adb起動
カンペ⇒10_adb起動.txt
開発PCのホーム直下にある~/.bashrcに以下を追加してあるか確認
export␣PATH=${PATH}:~/android/android-sdk-linux/platform-tools
export␣PATH=${PATH}:~/android/android-sdk-linux/tools
export␣ADBHOST=192.168.1.11 ←ターゲットボードのIPアドレス
開発PCのシェルからadbサーバ起動
[host_pc~] > adb␣kill-server ← adbサーバ停止コマンド
[host_pc~] > adb␣start-server ← adbサーバ起動コマンド
* daemon not running. starting it now on port 5037 * ← 開発PCの5037
ポート使用
* daemon started successfully *
[host_pc~] > adb␣devices
List of devices attached
emulator-5554
device ← ADBで接続できたらデバイスリストに表示される
[host_pc~] >
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
0-151
151](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-152-320.jpg)
![実
習
ddms起動
開発PCのシェルにてddms実行
[host_pc~] > ddms
プロセス一覧
スレッド一覧
ヒープメモリのプロファイル
アロケーショントラッカー など
ログの保存
Logcat・・・DalvikVMやシステムのログ
ddms→「Device」→「Screen
capchar」
でターゲットボードの画面キャプチャ
0-152
が撮れます
This material is licensed under the Creative Commons License BY-NC-SA 4.0.
152](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-153-320.jpg)


![参
考
ドライバの組込み/モジュール生成
前頁の例で作ったドライバをカーネルに組み込む
$ make menuconfig //設定GUI起動
# DeviceDrivers -> Misc Devices
#
-> [*]Sample GPIO CHAR for LED and User
Button
$ make
マスタ タイトルの書式設定
前頁の例で作ったドライバをモジュール(sample_gpio_char.ko)
にする
$ make menuconfig //設定GUI起動
#DeviceDrivers -> Misc Devices
#
-> [M]Sample GPIO CHAR for LED and User
Button
$ make modules
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-167
167](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-168-320.jpg)
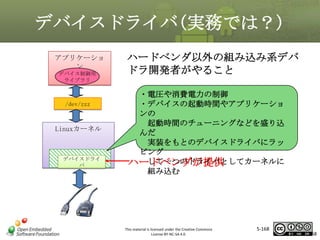
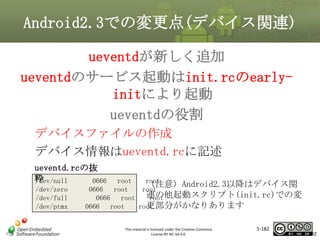
![Androidにおけるデバイス入出力
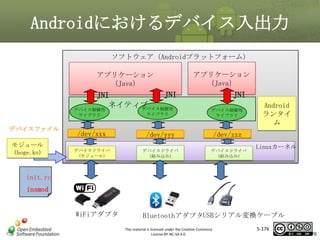
Linuxのデバイス入出力の仕組みとほぼ同じ
【相違点】
デバイスドライバ
カーネル起動後にモジュールをロードさせる場合はinit.rc
(init.[ハードウェア名].rc)に指定
マスタ タイトルの書式設定
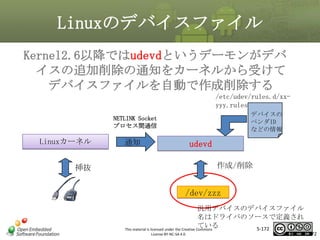
デバイスファイル(/dev/xxx)
udevdが存在しない
デバイス情報はカーネルからソケットとしてinitで監視中のdevice_fd
で
受け取る
ソケットにはsystem/core/init/devices.c の中で定義されたuevent構
造体が含まれている
system/core/init/devices.c内でmknod(デバイスファイル作成)して
5-175
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
175](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-176-320.jpg)
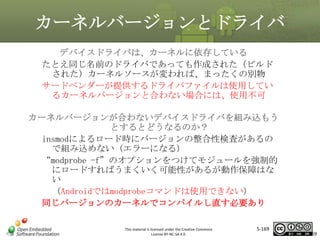
![デバイスドライバを
Androidのカーネルに組み込む
Androidのカーネルにドライバを組み込む方
法は通常のLinuxの場合と同じ
menuconfigの設定
マスタ タイトルの書式設定
• 組み込む場合は[*]
カーネルをビルド
• 生成されたカーネルのイメージファイルにデバイス
ドライバが組み込まれるので、既存のカーネルと差
し替える
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-177
177](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-178-320.jpg)
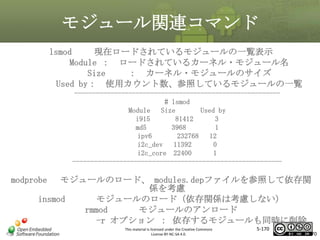
![デバイスドライバの
Androidカーネルモジュール作成
Androidのカーネル用のドライバのカーネル
モジュールを作成する方法は通常のLinux
の場合と同じ
マスタ タイトルの書式設定
menuconfigの設定
• モジュール作成は[M]
カーネルをビルド
• モジュール作成を指定した場合は「.ko」ファイル
が作成される
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-178
178](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-179-320.jpg)
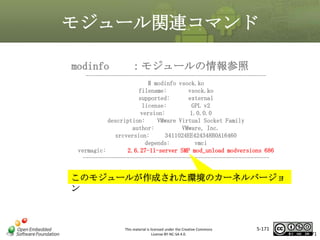
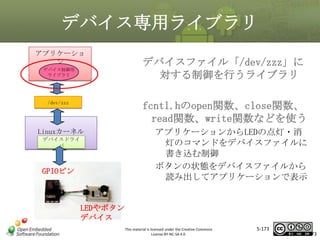
![devices.c について
Androidではデバイスルール的な条件はどこに設定するのか?
生成するデバイスファイルの名称, 権限、uid, gidはソース
devices.c の中の struct perms_ devperms[] で指定する
ただし、ユーザランドのコード変更なのでルートファイルシステムを
作成しなおす必要あり
マスタ タイトルの書式設定
devices.c
static struct perms_ devperms[] = {
{ "/dev/null",
0666, AID_ROOT,
{ "/dev/zero",
0666,
AID_ROOT,
{ "/dev/full",
0666, AID_ROOT,
{ "/dev/ptmx",
0666, AID_ROOT,
{ "/dev/hoge0",
0666, AID_ROOT,
{ "/dev/tty0",
0660,
AID_ROOT,
{ “/dev/cam”,
0660, AID_ROOT,
:
{ NULL, 0, 0, 0, 0 },
};
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
AID_ROOT,
AID_ROOT,
AID_ROOT,
AID_ROOT,
AID_ROOT,
AID_SYSTEM,
AID_CAMERA,
5-181
0 },
0 },
0 },
0 },
0 },
0 },
0 },
181](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-182-320.jpg)
![NDK(Native Development Kit)とは
Androidアプリケーションのメソッドの一部をネイティブコードに
置き替えることができる手段
[メリット]
既存の資産であるネイティブライブラリをアプリケーションに流用可能
apkファイルの中にプラットフォームごとのにビルドしたネイティブラ
イブラリ
(.so ファイル)を同梱し実機へ簡単にインストール
アプリケーションの速度を向上
apkファイル
Linuxのシステムコール
マスタ タイトルの書式設定
Javaクラスファイル
(dex)
Xmlリソースファイル
[注意点]
JNIのオーバーヘッドの考慮が必要
マニフェストファイル、署
必ず高速化するわけではない
名
NDKで作成した.soファイルはプラットフォーム互換が
libs/armeabi/
libs/x86/
ないのでCPUごとにリビルドして作成する必要がある ARM用(so)
X86用(so)
(ARM9用、x86用など)
すべてのC++ライブラリが使用できるわけではない
メモリとリソースの管理が重要
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-186
186](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-187-320.jpg)
![NDKインストール
マスタ タイトルの書式設定
③ダウンロードしたNDKのアーカイブを展開
④/[自分のホームディレクトリ]/.bashrcにNDKのパスを追
記
export PATH=${PATH}:~/NDKのルートディレクト
リ
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-189
189](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-190-320.jpg)
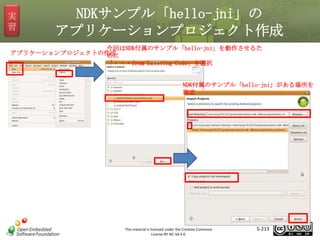
![実
習
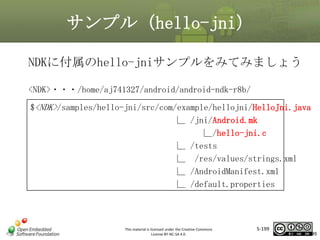
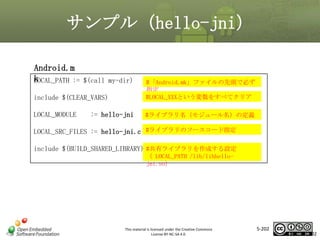
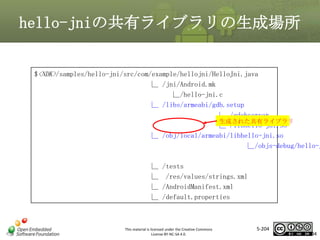
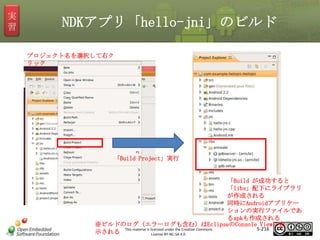
hello-jniの共有ライブラリを生成しましょう
[host_pc~] > cd␣<NDK>/samples/hello-jni
[host_pc~] > ls
AndroidManifest.xml default.properties
tests
[host_pc~] > ndk-build
jni
res
src
マスタ タイトルの書式設定
Gdbserver
: [arm-linux-androideabi-4.6]
libs/armeabi/gdbserver
Gdbsetup
: libs/armeabi/gdb.setup
Compile thumb : hello-jni <= hello-jni.c
SharedLibrary : libhello-jni.so
Install
: libhello-jni.so =>
libs/armeabi/libhello-jni.so
[host_pc~] > ls
AndroidManifest.xml default.properties
res src tests
jni
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
libs
obj
5-203
203](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-204-320.jpg)

![実
習
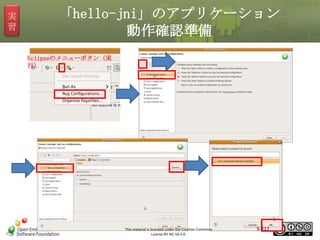
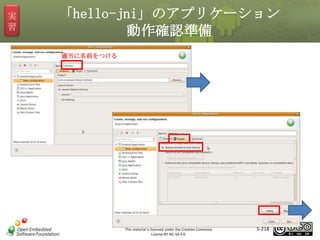
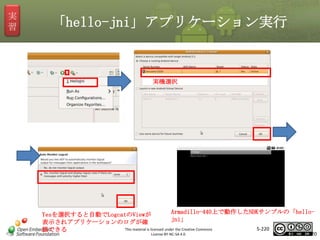
「hello-jni」のアプリケーション
動作確認準備
①下図のように接続し、
JP2をOPENで
Armadilli440の電源をいれる
②ホストPCのシェルからadbサーバ起動
マスタ タイトルの書式設定
192.168.1.10
[host_pc~] > adb␣kill-server
[host_pc~] > adb␣start-server
* daemon not running. starting it now
on port 5037 *
* daemon started successfully *
[host_pc~] > adb␣devices
List of devices attached
emulator-5554 device
192.168.1.11
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-219
219](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-220-320.jpg)
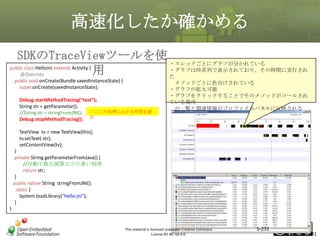
![TraceViewの使い方
コードにDebug.startMethodTracingを仕込んだアプリを実機で実行
実機の/sdcard/にtest.traceが生成
[host_pc~] > adb pull
/sdcard/test/trace ./
[host_pc~] > traceview ./test.trace
name
メソッド名
Incl%
最大経過時間に対するインク
ルーシブタイムの割合
マスタ タイトルの書式設定
包括時間
Excl%
最大経過時間に対するイクスク
ルーシブタイムの割合
Exclusive
降順にソート
Inclusive
実際にメソッドの実行に費やさ
れた時間
Calls+Recu コール回数+再帰的にコールされ
r
る回数、合計コール回数
Calls/Tota
l
解析方法
Time/Call
平均タイム
① Excl%の値が高いメソッドを見つけて最適化す
る
② Incl%の値が高いメソッドを見つけて最適化す
る
5-232
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
232](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-233-320.jpg)
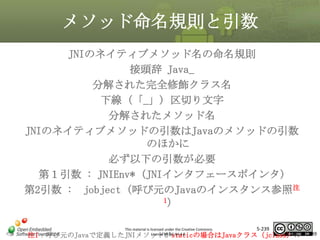
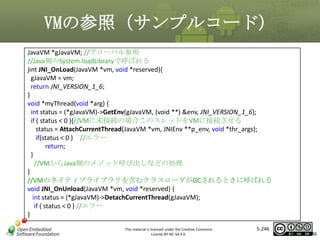
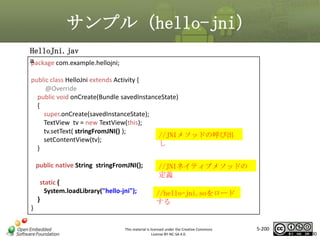
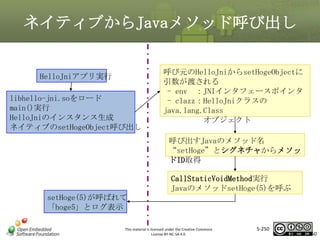
![Javaからネイティブ呼び出し
①Javaのコード作成、ビルド
HelloJni.java → HelloJni.class
package com.example.hellojni;
public class HelloJni {
static {
System.loadLibrary("hello-jni");
}
public native boolean setValue(int value);
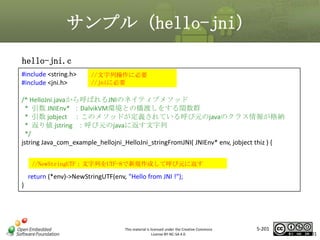
③Cのコード作成(hello-jni.c)
- com_example_hellojni_HelloJni.h をinclud
- JNIメソッド内の処理作成
#include <string.h>
#include <jni.h>
#include <com_example_hellojni_HelloJni.h>
jboolean
Java_com_example_hellojni_HelloJni_setValue
( JNIEnv* env, jobject thiz, jint value ) {
sum = 100 + value;
if( sum > 100 ){
return JNI_TRUE;
return JNI_FALSE;
}
マスタ タイトルの書式設定
public static void main(String[] args) {
HelloJni jni = new HelloJni ();
Boolean res = jni.setValue ( 1 );
}
}
②javahでJNIヘッダファイル作成
④ビルドしてlibhello-jni.so作成/共有ライ
ブラリ用ディレクトリに配置
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-247
247](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-248-320.jpg)
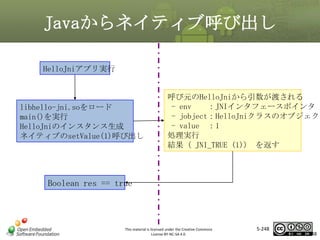
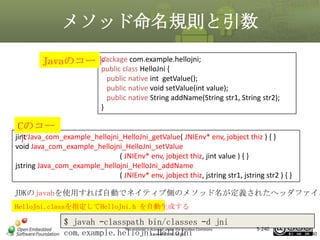
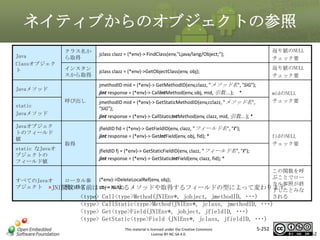
![ネイティブからJavaメソッド呼び出し
①Javaのコード作成、ビルド
HelloJni.java → HelloJni.class
package com.example.hellojni;
public class HelloJni {
static {
System.loadLibrary("hellojni");
}
protected static native void
setHogeObject();
protected static void
setHoge(int value){
Log.i("Test", "hoge" +
value);
}
public static void main(String[]
args) {
HelloJni jni = new HelloJni();
jni.setHogeObject();
②javahでJNIヘッダファイル作成
}
}
③Cのコード作成(hello-jni.c)
- com_example_hellojni_HelloJni.h をinclude
- JNIメソッド内の処理作成
void
Java_com_example_hellojni_HelloJni_setHogeObject
(JNIEnv *env, jclass clazz) {
jmethodID mid = (*env)->
GetStaticMethodID(env, clazz, “setHoge", "(I)V");
(*env)->CallStaticVoidMethod(env, clazz, mid, 5);
return;
}
マスタ タイトルの書式設定
呼び元のJavaで定義したJNIメ
ソッドがstaticの場合は
java.lang.Classの参照になる
④ビルドしてlibhello-jni.so作成/共有ライ
ブラリ用ディレクトリに配置
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-249
249](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-250-320.jpg)

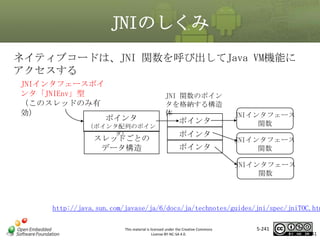
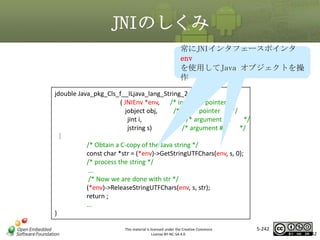
V
void
Javaメソッド
long hoge(int n, String s, int[] arr);
マスタ タイトルの書式設定
シグニチャー表現
(ILjava/lang/String;[I)J
JDKのjavapを使用すれば指定されたク
ラスのメソッドのシグニチャーが表示
されます
$ javap –s <完全指定のJavaクラスファイル名>
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-251
251](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-252-320.jpg)

5-258
This material is licensed under the Creative Commons
• フレームの末尾データの値 License BY-NC-SA 4.0. : アスキー
258](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-259-320.jpg)
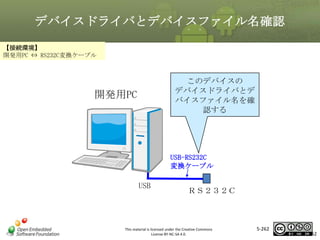
![デバイスドライバとデバイスファイル名確認
①開発用PCにデバイス挿入前
※すでに本研修で
開発用PCに接続して
しまっているので
①は確認できません
[host_pc~] > lsmod
マスタ タイトルの書式設定
Module
binfmt_misc
nfsd
exportfs
Size Used by
6587 1
238871 13
3437 1 nfsd
[host_pc~] > ls␣/dev/tty*
:
/dev/tty15 /dev/tty26 /dev/tty37 /dev/tty48 /dev/tty59
/dev/ttyS3
/dev/tty16 /dev/tty27 /dev/tty38 /dev/tty49 / dev/tty6
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-263
263](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-264-320.jpg)
![実
習
デバイスドライバとデバイスファイル名確認
【環境】
開発用PCのLinuxシェル
②開発用PCにデバイス挿入後
[host_pc~] > lsmod
Module
ftdi_sio
usbserial
binfmt_misc
nfsd
exportfs
Size
Used by
①と②を見比べる
34252 USB SERIALにはFTDI_SOドライバが
1
33694
3 ftdi_sio
使われていることがわかる
6587
1
238871
13
3437
1 nfsd
マスタ タイトルの書式設定
[host_pc~] > ls␣/dev/tty*
:
/dev/tty15 /dev/tty26
/dev/ttyS3
/dev/tty16 /dev/tty27
/dev/ttyUSB0
/dev/tty37
/dev/tty48
/dev/tty59
/dev/tty38
/dev/tty49
/dev/tty6
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-264
264](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-265-320.jpg)
![実
習
カーネルコンフィギュレーションの
編集と適用と確認
【環境】
開発用PCのLinuxシェ
ル
カンペ⇒11_FTDIカーネルコンフィギュレーションとビ
ルド.txt
①$ANDROID/Embedded-MasterARM/kernel/armadillo440/arch/arm/configs/armadillo400_android_de
fconfigを別名コピー。(armadillo400_android_ensyu_defconfig)
マスタ タイトルの書式設定
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/kernel/armadillo440/arch/arm/configs
[host_pc~] >
cp␣armadillo400_android_defconfig␣armadillo400_android_ensyu_defconfig
②geditで直接編集。下記を追加。
[host_pc~] > gedit␣armadillo400_android_ensyu_defconfig
# USB port drivers
#
CONFIG_USB_SERIAL=y
CONFIG_USB_SERIAL_FTDI_SIO=y
③geditで保存して終了
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-265
265](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-266-320.jpg)
![実
習
カーネルコンフィギュレーションの
編集と適用と確認
カンペ⇒11_FTDIカーネルコンフィギュレーションとビ
ルド.txt
④makeコマンドでコンフィグレーション設定
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/kernel/armadillo440
[host_pc~] > make␣ARCH=arm␣CROSS_COMPILE=$ANDROID/Embedded-MasterARM/prebuilt/linux-x86/toolchain/arm-eabi-4.4.3/bin/arm-eabi␣armadillo400_android_ensyu_defconfig
マスタ タイトルの書式設定
⑤カーネルコンフィギュレーション値が反映されたか「.config」をless
で確認しましょう
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/kernel/armadillo440
[host_pc~] > less␣config
lessで開いて検索( 「/」キーのあとにキーワードを入れてリターン)し設定が反映され
ているかを確認する
# USB port drivers
#
CONFIG_USB_SERIAL=y
CONFIG_USB_SERIAL_FTDI_SIO=y
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-266
266](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-267-320.jpg)
![実
習
Androidカーネルイメージの作成
カンペ⇒11_FTDIカーネルコンフィギュレーションとビ
ルド.txt
⑥カーネルイメージ作成
[host_pc~] > make␣ARCH=arm␣CROSS_COMPILE=$ANDROID/Embedded-Master-
マスタ タイトルの書式設定
ARM/prebuilt/linux-x86/toolchain/arm-eabi-4.4.3/bin/arm-eabi-
//カーネルのイメージファイル作成
[host_pc~] > gzip␣-c␣arch/arm/boot/Image␣>␣linux_training.ensyu_bin.gz
FTDIデバイスを組み込んだ
Androidのカーネルイメー
ジ
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-267
267](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-268-320.jpg)
![実
習
ユーザランドのソースの修正
【環境】
開発用PCのLinuxシェル
カンペ⇒12_演習用ユーザランド作
成.txt
ユーザランド内で組み込んだデバイス(デバイスファイル名
「ttyUSB0」)にアプリケーションなどがアクセスできるよう
にします
① $ANDROID/system/core/init/devices.c
マスタ タイトルの書式設定
の構造体「perms_devperms[]」に以下の行を追加します
デバイスファイル「ttyUSB0」の追加とアクセス権限、uid、gidの設定を行っ
ています
static struct perms_ devperms[] = {
{ "/dev/null",
0666, AID_ROOT,
AID_ROOT,
0 },
{ "/dev/zero",
0666, AID_ROOT,
AID_ROOT,
0 },
{ "/dev/full",
0666, AID_ROOT,
AID_ROOT,
0 },
{ "/dev/ptmx",
0666, AID_ROOT,
AID_ROOT,
0 },
{ "/dev/tty",
0666, AID_ROOT,
AID_ROOT,
0 },
{ "/dev/tty0",
0660, AID_ROOT,
AID_SYSTEM,
0 },
{ "/dev/cam",
0660, AID_ROOT,
AID_CAMERA,
0 },
:
{ "/dev/ttyUSB0", 0666, AID_ROOT,
AID_ROOT,
0 },
{ NULL, 0, 0, 0, 0 },
};
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-269
269](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-270-320.jpg)
![Androidのユーザランドのビルド
カンペ⇒12_演習用ユーザランド作
成.txt
②ユーザランドのビルド
マスタ タイトルの書式設定
// Androidユーザランドのビルド
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/
[host_pc~] > echo␣"TARGET_PRODUCT:=armadillo440"␣>␣buildspec.mk
[host_pc~] > make␣-j2
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-270
270](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-271-320.jpg)
![実
習
ユーザランドのファイルシステム作成
カンペ⇒12_演習用ユーザランド作成.txt
③ Androidのルートファイルシステムに必要なファイル類を集め
る
[host_pc~] > cd␣$ANDROID
[host_pc~] > mkdir␣-p␣android-ensyu_root
マスタ タイトルの書式設定
[host_pc~] > cd␣$ANDROID/Embedded-MasterARM/out/target/product/armadillo440
[host_pc~] > cp␣-Rdpf␣root/*␣$ANDROID/android-ensyu_root
[host_pc~] > cp␣-Rdpf␣system/* $ANDROID/android—ensyu_root/system/
[host_pc~]
[host_pc~]
[host_pc~]
[host_pc~]
[host_pc~]
>
>
>
>
>
cd␣$ANDROID/android-ensyu_root
sudo␣chown␣-R␣root.root␣.
sudo␣chmod␣777␣-R␣system/usr/keychars
sudo␣chmod␣777␣-R␣system/usr/keylayout
sudo␣chmod␣777␣system/etc/dhcpcd/dhcpcd-run-hooks
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-271
271](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-272-320.jpg)
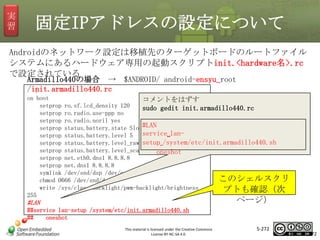
![実
習
固定IPアドレス設定
カンペ⇒02_固定IPアドレス設定.txt
④ 起動時に固定IPアドレスが設定されるようなシェルスクリプト
作成
//Androidのネットワーク設定ファイルに固定IPアドレスを設定しておく
[host_pc~] > cd␣$ANDROID/ android-ensyu_root
[host_pc~] > cd␣system/etc
[host_pc~] > sudo␣gedit␣init.armadillo440.sh
マスタ タイトルの書式設定
gedit起動、編集
#!/system/bin/sh
netcfg eth0 up
netcfg eth0 dhcp
#!/system/bin/sh
ifconfig␣eth0␣192.168.1.11
保存してgedit終了
//実行権限をつける
[host_pc~] > sudo␣chmod␣a+x init.armadillo440.sh
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-273
273](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-274-320.jpg)
![実
習
Androidファイルシステムの完成
カンペ⇒03_ファイルシステムの完
成.txt
⑤ Androidのルートファイルシステムのアーカイブ作成
//Androidユーザランドのファイルシステムをアーカイブにする
[host_pc~] > cd␣$ANDROID/android-ensyu_root
[host_pc~] > tar␣cvzf␣$ANDROID/rootfs_ensyu_training.tar.gz .
[host_pc~] > cd␣$ANDROID
[host_pc~] > ls
マスタ タイトルの書式設定
Embedded-Master-ARM␣rootfs_ensyu_training.tar.gz␣androidensyu_root␣
rootfs_a_training.tar.gz␣android-root
FTDIデバイスを組み込んだ
Androidのユーザランドのファイルシス
テム
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-274
274](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-275-320.jpg)
![4章の実習完了後のメモリの状態
【接続環境】
開発用PC ⇔ Armadillo-440(RS232Cケーブ
ル)
JP2ショート状態(hermit起動モード)
[armadillo] hermit>
setenv
console=ttymxc1
root=/dev/mmcblk0p2
init=/init
noinitrd
rootwait
[armadillo] hermit> boot
開発用PC
C-Kermit
シリアル通信ソフ
ト
マスタ タイトルの書式設定
Armadillo-440
NOR Flashメモリ(32M)
linux_training_.bi
n.gzをRAMに
ロードして実行
組み込み済み
現在はこの状態
bootloader
ブートローダ領域(Hermit)
SDカード内の
Androidで起動
Android対応kernel
Linuxカーネル領域
userland
microSD
/dev/mmcblk0p1
Androidの
ルートファイル
システム
/dev/mmcblk0p2
Linuxユーザランド領域
config
Linuxカーネルパラメータ保存領域
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
Androidが起動
5-276
276](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-277-320.jpg)
![実
習
ユーザランドの差し替えをするので
通常Linuxのカーネルに戻す
【接続環境】
開発用PC ⇔ Armadillo-440(RS232Cケーブル)
JP2ショート状態(hermit起動モード)
カンペ⇒05_製品版Linuxのブート手
順.txt
[host_pc~] $ cd␣~/work/atmark
[host_pc~] $ hermit␣download␣--input-file␣linux-a400-1.06.bin.gz␣--region␣kernel␣--port␣
マスタ タイトルの書式設定
/dev/ttyUSB0
Armadillo-440
NOR Flashメモリ(32M)
開発用PC
bootloader
ブートローダ領域(Hermit)
kernel
hermit
Linuxカーネル領域
Armadillo用
ブートローダ兼ダウンロー
ダ
userland
Linuxユーザランド領域
config
Linuxカーネルパラメータ保存領域
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-277
277](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-278-320.jpg)
![実
習
通常Linuxのカーネルで起動
【接続環境】
開発用PC ⇔ Armadillo-440(RS232Cケーブル)
JP2ショート状態(hermit起動モード)
開発用PC
カンペ⇒05_製品版Linuxのブート手順.txt
[armadillo] hermit>
clearenv
[armadillo] hermit>
setenv
Armadillo-440
[armadillo] hermit> boot
NOR Flashメモリ(32M)
C-Kermit
シリアル通信ソ
フト
マスタ タイトルの書式設定
linux-a400-1.06.bin.gz
をRAMにロードして実行
/dev/mmcblk0
bootloader
microSD
ブートローダ領域(Hermit)
kernel
Linuxカーネル領域
×
Androidの
ルートファイル
/dev/mmcblk0p2
システム
userland
Linuxユーザランド領域
linux-romfsをマウント
各プロセスの実行
config
Linuxカーネルパラメータ保存領域
通常Linuxが起動
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-278
278](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-279-320.jpg)
![実
習
演習用Android RootfsをArmadillo-440へ転送
【接続環境】
開発用PC ⇔ Armadillo-440(RS232Cケーブル)
開発用PC ⇔ Armadillo-440(LANケーブル)
JP2ショート状態(hermit起動モード)
開発PC
armadillo440
マスタ タイトルの書式設定
FTP
/home/ftp/pub/
カンペ⇒07_Android RootFSのFTP転送.txt
rootfs_ensyu_training.tar.gz
192.168.1.10
192.168.1.11
[host_pc~] > cd␣$ANDROID
[host_pc~] > ftp␣192.168.1.11
login name:ftp
login password:なし
ftp> cd␣pub
ftp> bin
ftp> put␣rootfs_ensyu_training.tar.gz
ftp> bye
[host_pc~] >
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-279
279](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-280-320.jpg)
![実
習
演習用Android RootfsをmicroSDに展開
Armadillo440の/home/ftp/pubからAndroidのユーザラ
ンドのファイルシステムをmicroSDカードのパーティ
ション2(mmcblk0p2)に展開します
マスタ タイトルの書式設定
カンペ⇒13_演習用Android RootFSをmicroSDに展開.txt
[armadillo ~] # mount␣/dev/mmcblk0p2 /mnt
//microSDのパーティション2に
マウント
[armadillo ~] # rm –rf /mnt/*
//マウント配下の
ファイルやディレクトリを削除 [armadillo ~] # cd␣/home/ftp/pub
//ftpで転送したRootfsのある場所へ
[armadillo ~] # mv␣rootfs_ensyu_training.tar.gz␣/mnt/. //マウント配下にRootfsを
移動
[armadillo ~] # cd␣/mnt
//マウント
ディレクトリへ
[armadillo ~] # tar␣xzvf␣rootfs_ensyu_training.tar.gz
// Rootfsを展開
[armadillo ~] # rm␣–rf␣lost+found
//不要なフォルダの
削除
[armadillo ~] # rm␣–rf␣rootfs_ensyu_training.tar.gz
//tarファイルも削除
[armadillo ~] # cd␣..
5-280 //マウント
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
280
ディレクトリから抜ける](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-281-320.jpg)
![実
習
製品版Linuxのrebootとkermit切断
[armadillo ~] # reboot
[armadillo ~] #
System is going down for system reboot now.
Starting local stop scripts.
Exiting Syslogd!
Syncing all filesystems:
done
Unmounting all filesystems:
done
The system is going down NOW !!
Sending SIGTERM to all processes.
Please stand by while rebooting the system.
Hermit-At v2.0.8 (armadillo4x0) compiled at 15:29:17, Nov 12 2010
hermit> <ctrl+→ctrl+c> //ショートカットキー
(Back at ubuntu-vm)
---------------------------------------------------(/home/aj741327/) C-Kermit> q
Closing /dev/ttyUSB0...OK
[host_pc~] >
マスタ タイトルの書式設定
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-281
281](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-282-320.jpg)
![実
習
デバイスを組み込んだAndroid用カーネルを書き込む
【接続環境】
開発用PC ⇔ Armadillo-440(RS232Cケーブル)
JP2ショート状態(hermit起動モード)
カンペ⇒14_演習用Androidブート手順.txt
# Armadillo440用の標準カーネルをAndroidのLinuxカーネルで上書きします
[host_pc~] > cd␣$ANDROID/Embedded-Master-ARM/kernel/armadillo440
[host_pc~] > hermit␣download␣--input-file␣linux_training_ensyu.bin.gz␣--
マスタ タイトルの書式設定
region␣kernel␣
--port␣/dev/ttyUSB0
Armadillo-440
NOR Flashメモリ(32M)
開発用PC
bootloader
ブートローダ領域(Hermit)
Android対応kernel
hermit
Linuxカーネル領域
Armadillo用
ブートローダ兼ダウンロー
ダ
userland
Linuxユーザランド領域
config
Linuxカーネルパラメータ保存領域
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-282
282](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-283-320.jpg)
![実
習
デバイスを組み込んだ新Androidで起動
【接続環境】
開発用PC ⇔ Armadillo-440(RS232Cケーブル)
JP2ショート状態(hermit起動モード)
開発用PC
カンペ⇒14_演習用Androidブート手順.txt
[armadillo] hermit>
setenv␣console=ttymxc␣root=/dev/mmcblk0p2␣init=/init␣noinitrd␣ rootwait
[armadillo] hermit> boot
C-Kermit
シリアル通信ソ
フト
マスタ タイトルの書式設定
Armadillo-440
NOR Flashメモリ(32M)
linux_training_ensyu.b
in.gzをRAMにロードして
実行
組み込み済み
bootloader
ブートローダ領域(Hermit)
SDカード内の
Androidで起動
Android対応kernel
/dev/mmcblk0
microSD
Linuxカーネル領域
userland
Androidの
ルートファイル
システム
/dev/mmcblk0p2
Linuxユーザランド領域
config
Linuxカーネルパラメータ保存領域
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
新Androidが起動
5-283
283](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-284-320.jpg)
![実
習
新Android起動後の確認事項
【接続環境】
ここでは
作業用PC ⇔ Armadillo-440(RS232Cケーブル)
から下記に変更する
開発用PC ⇔ Armadillo-440(LANケーブル)
ネットワーク設定の確認をします
[Android] # netcfg
lo UP
127.0.0.1
255.0.0.0
eth0
UP
192.168.1.11
マスタ タイトルの書式設定
0x00000049
255.255.255.0. 0x00001043
※上記のIPアドレスが設定されていない場合は「ifconfig eth0 192.168.1.11」を手
打ち
で実行して設定してください。
IPアドレスの設定確認終了後
①ckermitでの接続を切断(Androidのプロンプトで[ctrl+→ctrl+c] ⇒
[q])
②RS232CケーブルをArmadilloからはずす
③LANケーブルで開発用PCと接続
④開発用PCのコマンドプロンプトからpingを投げてネットワークの接続の確
認
5-284
This material is licensed under the Creative Commons
⑤adb shell 起動
License BY-NC-SA 4.0.
284](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-285-320.jpg)
![実
習
新Android起動後の確認事項
【接続環境】
開発用PC ⇔ Armadillo-440(LANケーブル)
Armadillo-440のUSBポートに「USBシリアル変換ケーブル」を抜き挿ししてデ
バイス
ファイル「ttyUSB0」があるか確認します
マスタ タイトルの書式設定
①Armadillo-440に挿入前
[Android] # ls␣/dev/tty*
:
/dev/tty15 /dev/tty26 /dev/tty37 /dev/tty48 /dev/tty59 /dev/ttyS3
/dev/tty16 /dev/tty27 /dev/tty38 /dev/tty49 / dev/tty6
②Armadillo-440に挿入後
[Android] # ls␣/dev/tty*
:
/dev/tty15 /dev/tty26 /dev/tty37 /dev/tty48 /dev/tty59 /dev/ttyS3
/dev/tty16 /dev/tty27 /dev/tty38 /dev/tty49 /dev/tty6 /dev/ttyUSB0
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-285
285](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-286-320.jpg)
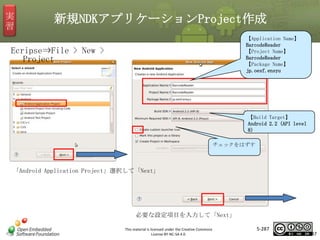
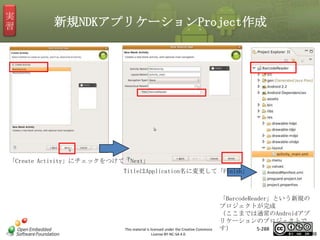
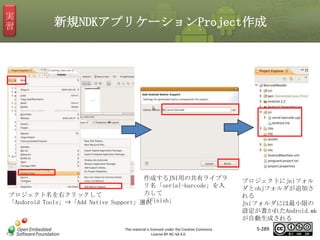
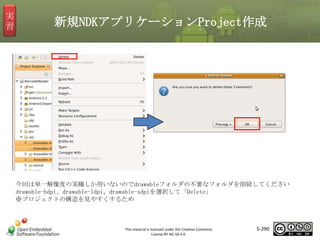
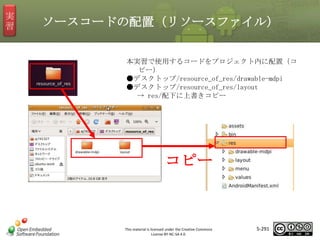
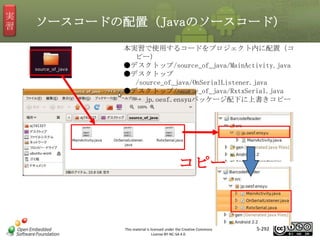
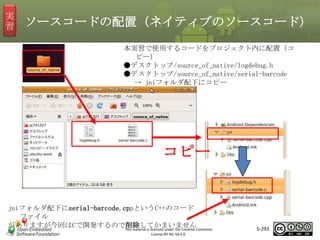

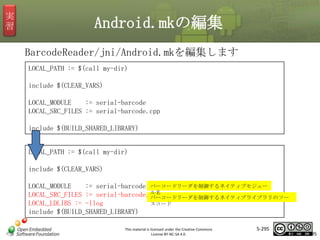
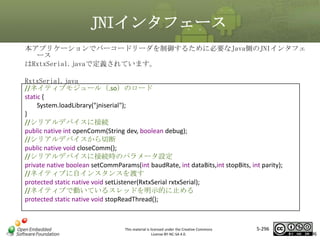
![実
習
JNIヘッダファイルの生成
①JNIインタフェースが定義されたヘッダファイルを作成します
AndroidのJavaのコードのコンパイル結果(.classファイル)は<Project>/bin/classes配下に
存在します。
JDKのjavahコマンドでJNIヘッダファイルの生成とプロジェクトのjniディレクトリへの配置を
行います。
カンペ⇒15_JNIヘッダファイル作
成.txt
[host_pc~]
[host_pc~]
[host_pc~]
Android.mk
$ cd␣~workspace/BarcodeReader //アプリケーションのプロジェクト
$ javah␣-classpath␣bin/classes␣-d␣jni␣jp.oesf.ensyu.RxtxSerial
$ ls␣jni
serial-barcode.c logdebug.h jp_oesf_ensyu_RxtxSerial.h
マスタ タイトルの書式設定
②Eclipseにてプロジェクト名を右クリックし、「Refresh」を行うことで、Eclipse内のパッ
ケージ構成にも
作成したヘッダファイルが表示されます
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-297
297](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-298-320.jpg)
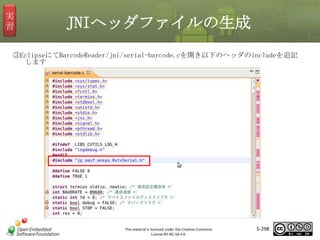
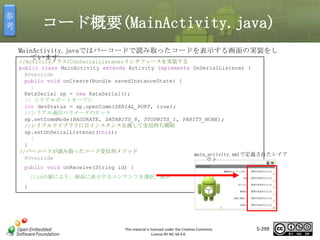
![参
考
本実習のネイティブコード概要解説
シリアル通信用パラメータの設定
#include <termios.h>
struct termios oldtio, newtio; /* 通信設定構造体 */
JNIEXPORT jboolean JNICALL Java_jp_oesf_ensyu_RxtxSerial_setCommParams(
JNIEnv *env, jobject obj, jint baudrate, jint databits, jint
stopbits,jint parity){
//制御モード(シリアル通信の制御全般の設定)
newtio.c_cflag = BAUDRATE | CRTSCTS | CS8 | CLOCAL | CREAD;
//入力モード(入力された文字に対して行う設定)
newtio.c_iflag = IGNPAR | ICRNL;
//出力モード(出力する文字jに対して行う処理)
newtio.c_oflag = 0;
//ローカルモード(通信先に影響のない設定)
newtio.c_lflag = ICANON;
newtio.c_cc[VMIN] = 1;
newtio.c_cc[VTIME] = 0;
マスタ タイトルの書式設定
cfmakeraw(&newtio);
cfsetospeed(&newtio, BAUDRATE);
cfsetispeed(&newtio, BAUDRATE);
/* 設定上書き(即座に) */
tcflush(fd, TCIFLUSH);
tcsetattr(fd, TCSANOW, &newtio);
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-302
302](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-303-320.jpg)
![参
考
readThread(void)の処理
シリアル通信
マネージャ
③JavaメソッドにString型でコールバック
マスタ タイトルの書式設定
JNI
シリアル
インタフェース
ライブラリ
/dev/ttyUSB0
有効なコードか判定
Buf[1024]
41
②開始”0C”受信後から
終了”0D”受信までの
バイトデータをバッファに詰め込む
9 2 1
・・・
①バーコードリーダから1byteずつデータを
受信
USBシリアル
ドライバ
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-305
305](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-306-320.jpg)

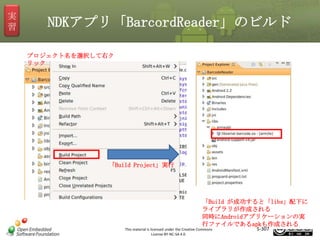
![実
習
「BarcordReader」のアプリケーション
動作確認準備
ホストPCのシェルからadbサーバを起動してarmadillo-440とadb接続する
[host_pc~] > adb␣kill-server
[host_pc~] > adb␣start-server
* daemon not running. starting it now on port 5037 *
* daemon started successfully *
[host_pc~] > adb␣devices
List of devices attached
emulator-5554 device
マスタ タイトルの書式設定
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-308
308](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-309-320.jpg)
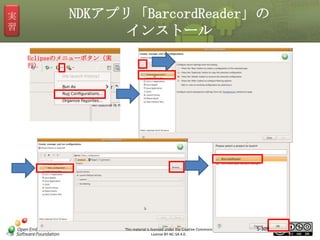
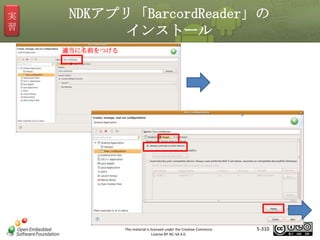
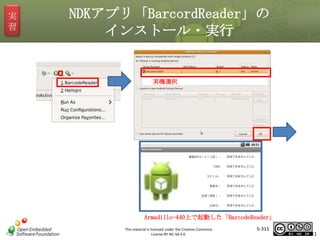
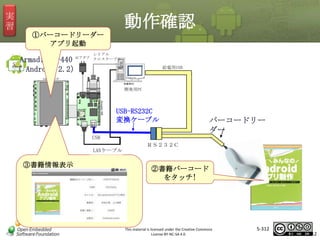

![参
考
アプリケーション開発環境事前確認
-No!(バージョンが1.5)→使用するJDKを6に変更
下記コマンドで変更します
$ sudo␣update-alternatives␣--config␣java
マスタ タイトルの書式設定
There are 2 choices for the alternative java (providing
/usr/bin/java).
選択肢
パス
優先度 状態
-----------------------------------------------------------0
/usr/lib/jvm/java-6-sun/jre/bin/java
63
自動モード
* 1
/usr/lib/jvm/java-1.5.0-sun/jre/bin/java 53
動モード
2
/usr/lib/jvm/java-6-sun/jre/bin/java
63
手動モード
現在の選択 [*] を保持するには Enter、さもなければ選択肢の番号の
5-318
This
under the Creative
キーを押してください: 0material is licensed BY-NC-SA 4.0. Commons
License
手
318](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-319-320.jpg)
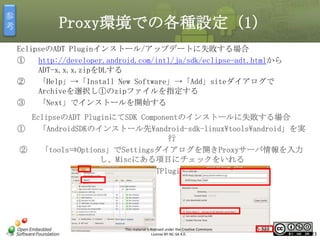
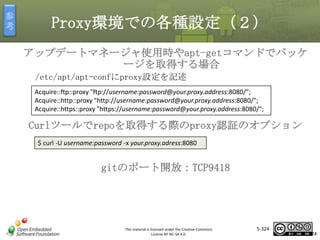
![参
考
init.rcのAction解説
<trigger> の種類
init.rc
boot
propname=value
on <trigger>
<command>
<command>
:
SERVICE部
プロパティ(propname)に値(value)が設
定されたときに発生するトリガー
device-added(またはremoove)-<path>
ACTION部
Initが起動したときに発生するトリガー
デバイスノードが追加または削除された
ときに発生するトリガー
マスタ タイトルの書式設定
service-exited-<name>
サービスが終了したときに発生するトリ
ガー
<command> の種類
class_start <class name>
class_stop <class name>
import <path>
<class name>に属するserviceの
startまたはstopを一括指定
pathでされた*.rcファイルをパ
ース
Exec <path> [<argument>]*
Forkして<path>で指定したプログラムを実行(
非推奨)
export <name> <value>
グローバル環境変数設定
ifup <interface>
Interfaceをオンラインに
hostname <name>
ホスト名設定
insmod <path>
モジュールを<path>にインスト
ール
copy <from path> <to path>
ファイルコピー
trigger <target define>
target defineに指定したトリガーを実施
setprop <name> <value>
nameのプロパティにvalueを設定
する
chdir <directry>
作業ディレクトリ変更
chmod <octal-mode> <path>
パーミッション付与
chown <owner> <group>
<path>
ファイルのオーナーとグループ
の変更
chroot <directry>
プロセスのルートディレクトリ変更
loglevel <level>
3=ERROR, 5=NOTICE, 6=INFO
デバイスファイル登録指定
sourceは”/dev/hoge” や“/dev/fuga* “のよ
<permission> <uid> <gid>
5-325
This material is licensed under the Creative Commonsうに書く
device <source>
License BY-NC-SA 4.0.
325](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-326-320.jpg)
![参
考
init.rcのService解説
init.rc
ACTION部
:
SERVICE部
service <service> <path> [argument]*
[option]
マスタ タイトルの書式設定
<option>
<option>
:
<option> の種類
capability
class
oneshot
onresta
rt
console
サービスが再起動したときにコマンドを
実行
setenv
クラス名付与
サービスが終了した際に再起動しない
プロセス起動時に環境変数に値付与
critical
4分間に4回以上終了してしま
った場合リカバリーモードで起
動
socket
disabled
自動起動不可。明示的に起動
user
keycodes
Rootではなく指定のuserアカウントでサ
ービスを実行
Ioprio
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-326
326](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-327-320.jpg)
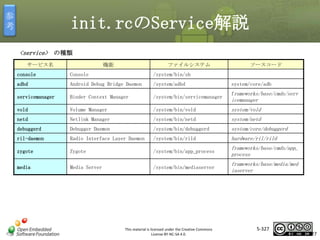
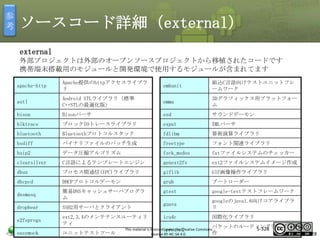
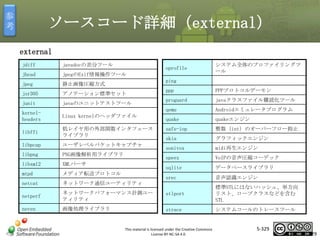
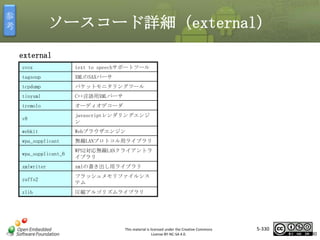
![参
考
JNIメソッドを一括登録する
Javaでネイティブ定義されたメソッドをJNIで認識させるためには
メソッドの命名規則を守って手動で記述したり、javahコマンドを
使って自動でヘッダファイルを作成する方法がありますが、メ
ソッド名が長く可読性が低くなります。
package com.sample.hellojni;
public class HelloJni {
static {
System.loadLibrary(“hellojni");
}
マスタ タイトルの書式設定
public native int openComm(String str, boolean debug);
public native void closeComm();
public native int getBaudrate();
public native boolean setParams(int i, int j, int k , int n);
public native int commWrite(byte b[], int off, int len);
public static native void setObject(new SomeObject());
public static native void stopTread();
定義されたネイティブメ
ソッドが多くなるにつれ
て、JNI側のコードが見難
くなるので、JNI側のコー
ドを見やすくするための
工夫が必要
メソッドを一括登録でき
るようにする
}
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-331
331](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-332-320.jpg)
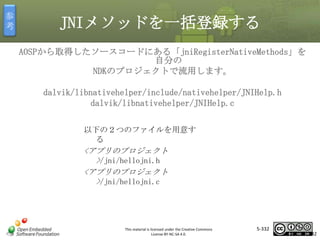
![参
考
JNIメソッドを一括登録する
hellojni.c
#include <jni.h>
#include "jniserial.h“
ヘッダのinclude
呼び出しもとのJavaのパッケー
ジ名
マスタ タイトルの書式設定
static JNINativeMethod methods[] = {
static const char *classPathName = "com/sample/hellojni/HelloJni";
{ "openComm","(Ljava/lang/Object;)Ljava/lang/Integer;",(void*)openComm },
{ "closeComm", "(Ljava/lang/Object;)V",(void*)closeComm },
{ "getBaudrate", "(Ljava/lang/Object;)Ljava/lang/Integer;",(void*)getBaudrate },
{ "setCommParams", "(Ljava/lang/Object;)Ljava/lang/Boolean;",(void*)setCommParams },
{ "commWrite", "(Ljava/lang/Object;)Ljava/lang/Integer;",(void*)commWrite },
{ "stopThread", "(Ljava/lang/Object;)V",(void*)stopReadThread },
メソッド名と
{ "setListener", "(Ljava/lang/Object;)V",(void*)setListener }
メソッドのシグネ
};
チャ
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-334
334](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-335-320.jpg)
![参
考
JNIメソッドを一括登録する
hellojni.c
int registerNatives(JNIEnv* env) {
if (!registerNativeMethods(env, classPathName, methods, sizeof(methods)/ sizeof(methods[0])))
return JNI_FALSE;
登録するメソッドの数を算出し
return JNI_TRUE;
registerNativeMethods実行
}
||
int registerNativeMethods(JNIEnv* env, const char*JNIHelp.h にて定義されてます
className, JNINativeMethod* gMethods, int numMethods) {
マスタ タイトルの書式設定
jclass clazz;
clazz = (*env)->FindClass(env, className);
if (clazz == NULL) {
LOGD_IF(debug, "Native registration unable to find class '%s'", className);
return JNI_FALSE;
}
if ((*env)->RegisterNatives(env, clazz, gMethods, numMethods) < 0) {
LOGD_IF(debug, "RegisterNatives failed for '%s'", className);
return JNI_FALSE;
}
return JNI_TRUE;
}
This material is licensed under the Creative Commons
License BY-NC-SA 4.0.
5-335
335](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-336-320.jpg)
![参
考
Android用ドライバモジュール作成と組み込み方法
【環境】
開発用PCのLinuxシェル
①カーネルコンフィグの設定を変更
該当のモジュール設定値を「M」にする
*「7章デバイスを組み込んだカーネルの作成」を参照
②カーネルをmakeしてカーネルモジュール作成(hoge.ko)
マスタ タイトルの書式設定
[host_pc~] > cd $ANDROID/linux-2.6.26-at-android
[host_pc~] > make ARCH=arm CROSS_COMPILE=$ANDROID/prebuilt/linuxx86/toolchain/arm-eabi-4.4.0/bin/arm-eabi- modules
*hoge.koができている場所(hoge.koがUSBシリアルデバイスだった場合)
Linuxカーネルのルート/drivers/usb/serial/hoge.ko
③Androidのルートファイルシステムの/data配下に②で作成したモジュールを配
置
④ Androidのルートファイルシステムの/etc配下にinstall_driver.shを作成して
実行権限を付与
($ chmod 777 /etc/install_driver.sh)
③init.rcを変更してsample.shを起動時にサービスして起動させる
5-337
This material is licensed under the Creative Commons
* 「5章ドライバのモジュールを組み込む」を参照
License BY-NC-SA 4.0.
337](https://image.slidesharecdn.com/androidarmadilo-440-140309230514-phpapp01/85/Android-Armadillo-440-338-320.jpg)