Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Mitz Amano
542 views
Osc 2009 tokyo_moblin_20090220
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 36
2
/ 36
3
/ 36
4
/ 36
5
/ 36
6
/ 36
7
/ 36
8
/ 36
9
/ 36
10
/ 36
11
/ 36
12
/ 36
13
/ 36
14
/ 36
15
/ 36
16
/ 36
17
/ 36
18
/ 36
19
/ 36
20
/ 36
21
/ 36
22
/ 36
23
/ 36
24
/ 36
25
/ 36
26
/ 36
27
/ 36
28
/ 36
29
/ 36
30
/ 36
31
/ 36
32
/ 36
33
/ 36
34
/ 36
35
/ 36
36
/ 36
More Related Content
PPTX
これから始める人のための自動化入門~Ubuntu Jujuを使って〜– OpenStack最新情報セミナー 2015年7月
by
VirtualTech Japan Inc.
PDF
Osc2010 tokyo spring_moblin_20100226
by
Mitz Amano
PPTX
これから始める人のための自動化入門 〜Ubuntu Jujuを使って〜
by
VirtualTech Japan Inc.
PDF
クラウドのなかみ
by
Satoshi Hirata
PDF
2013年版の inside windows azure
by
Sunao Tomita
PDF
OpenStack Icehouse構築手順書
by
VirtualTech Japan Inc.
PDF
OSC2010 Tokyo MeeGo 20100910
by
Mitz Amano
PDF
OpenStack Updates
by
Masanori Itoh
これから始める人のための自動化入門~Ubuntu Jujuを使って〜– OpenStack最新情報セミナー 2015年7月
by
VirtualTech Japan Inc.
Osc2010 tokyo spring_moblin_20100226
by
Mitz Amano
これから始める人のための自動化入門 〜Ubuntu Jujuを使って〜
by
VirtualTech Japan Inc.
クラウドのなかみ
by
Satoshi Hirata
2013年版の inside windows azure
by
Sunao Tomita
OpenStack Icehouse構築手順書
by
VirtualTech Japan Inc.
OSC2010 Tokyo MeeGo 20100910
by
Mitz Amano
OpenStack Updates
by
Masanori Itoh
What's hot
PDF
今時のチープなノートPC HP Stream 11でXubuntuを動かす
by
shimadah
PDF
IaaSクラウドを支える基礎技術 演習編_v1_0
by
Etsuji Nakai
PPTX
Canonicalが支える、さくっと使えるUbuntu OpenStack - OpenStack Day in ITpro EXPO 2014
by
VirtualTech Japan Inc.
PDF
多段LXC構成でOpenStackを構築 - LT@コンテナ型仮想化情報交換会LT
by
Yoshinari Kadokawa
PDF
IaaSクラウドを支える基礎技術 v1_0
by
Etsuji Nakai
PPTX
OpenStackで自動化ツールを使ってみた!(Ubuntu MAAS 1.7 対応版)
by
VirtualTech Japan Inc.
PDF
OpenStack base public cloud service by GMO Internet Inc., at 2013/12/12 Okin...
by
Naoto Gohko
PDF
OpenStackを一発でデプロイ – Juju/MAAS - OpenStack最新情報セミナー 2015年2月
by
VirtualTech Japan Inc.
PPTX
OpenStack マルチノード環境構築
by
HommasSlide
PDF
OpenStack構築手順書Mitaka版 (期間限定公開)
by
VirtualTech Japan Inc.
PDF
OpenStack検証環境構築・トラブルシューティング入門 - OpenStack最新情報セミナー 2014年8月
by
VirtualTech Japan Inc.
PDF
Windows 展開の自動化ツール - Microsoft Deployment Toolkit
by
shigeya
PDF
OpenStack Grizzly構築手順書
by
VirtualTech Japan Inc.
PPTX
Oem pcのつくりかた
by
Yamashita Daisuke
PPTX
Windows 11 insider tips for developer
by
Atomu Hidaka
今時のチープなノートPC HP Stream 11でXubuntuを動かす
by
shimadah
IaaSクラウドを支える基礎技術 演習編_v1_0
by
Etsuji Nakai
Canonicalが支える、さくっと使えるUbuntu OpenStack - OpenStack Day in ITpro EXPO 2014
by
VirtualTech Japan Inc.
多段LXC構成でOpenStackを構築 - LT@コンテナ型仮想化情報交換会LT
by
Yoshinari Kadokawa
IaaSクラウドを支える基礎技術 v1_0
by
Etsuji Nakai
OpenStackで自動化ツールを使ってみた!(Ubuntu MAAS 1.7 対応版)
by
VirtualTech Japan Inc.
OpenStack base public cloud service by GMO Internet Inc., at 2013/12/12 Okin...
by
Naoto Gohko
OpenStackを一発でデプロイ – Juju/MAAS - OpenStack最新情報セミナー 2015年2月
by
VirtualTech Japan Inc.
OpenStack マルチノード環境構築
by
HommasSlide
OpenStack構築手順書Mitaka版 (期間限定公開)
by
VirtualTech Japan Inc.
OpenStack検証環境構築・トラブルシューティング入門 - OpenStack最新情報セミナー 2014年8月
by
VirtualTech Japan Inc.
Windows 展開の自動化ツール - Microsoft Deployment Toolkit
by
shigeya
OpenStack Grizzly構築手順書
by
VirtualTech Japan Inc.
Oem pcのつくりかた
by
Yamashita Daisuke
Windows 11 insider tips for developer
by
Atomu Hidaka
Viewers also liked
PDF
Anroid Design Guide 3つのポイント
by
Masahiro Hidaka
PDF
Moving Forward: Overcoming Compatibility Issues BoFs
by
Yoshitake Kobayashi
PDF
Applying Linux to the Civil Infrastructure
by
Yoshitake Kobayashi
PDF
Q4.11: Next Gen Mobile Storage – UFS
by
Linaro
PDF
Improvement of Scheduling Granularity for Deadline Scheduler
by
Yoshitake Kobayashi
PDF
Evaluation of Data Reliability on Linux File Systems
by
Yoshitake Kobayashi
PDF
いまどきのLinuxインストールバトル(新型PC編) OSC2015 Nagoya LT
by
shimadah
PDF
Build your own embedded linux distributions by yocto project
by
Yen-Chin Lee
PDF
Q4.11: Introduction to eMMC
by
Linaro
PDF
An Essential Relationship between Real-time and Resource Partitioning
by
Yoshitake Kobayashi
PDF
Deadline Miss Detection with SCHED_DEADLINE
by
Yoshitake Kobayashi
PDF
Using Embedded Linux for Infrastructure Systems
by
Yoshitake Kobayashi
PDF
Ineffective and Effective Ways To Find Out Latency Bottlenecks With Ftrace
by
Yoshitake Kobayashi
PDF
Poky meets Debian: Understanding how to make an embedded Linux by using an ex...
by
Yoshitake Kobayashi
PDF
Using Real-Time Patch with LTSI Kernel
by
Yoshitake Kobayashi
PDF
How to Make Awesome SlideShares: Tips & Tricks
by
Slideshare
PDF
Getting Started With SlideShare
by
Slideshare
Anroid Design Guide 3つのポイント
by
Masahiro Hidaka
Moving Forward: Overcoming Compatibility Issues BoFs
by
Yoshitake Kobayashi
Applying Linux to the Civil Infrastructure
by
Yoshitake Kobayashi
Q4.11: Next Gen Mobile Storage – UFS
by
Linaro
Improvement of Scheduling Granularity for Deadline Scheduler
by
Yoshitake Kobayashi
Evaluation of Data Reliability on Linux File Systems
by
Yoshitake Kobayashi
いまどきのLinuxインストールバトル(新型PC編) OSC2015 Nagoya LT
by
shimadah
Build your own embedded linux distributions by yocto project
by
Yen-Chin Lee
Q4.11: Introduction to eMMC
by
Linaro
An Essential Relationship between Real-time and Resource Partitioning
by
Yoshitake Kobayashi
Deadline Miss Detection with SCHED_DEADLINE
by
Yoshitake Kobayashi
Using Embedded Linux for Infrastructure Systems
by
Yoshitake Kobayashi
Ineffective and Effective Ways To Find Out Latency Bottlenecks With Ftrace
by
Yoshitake Kobayashi
Poky meets Debian: Understanding how to make an embedded Linux by using an ex...
by
Yoshitake Kobayashi
Using Real-Time Patch with LTSI Kernel
by
Yoshitake Kobayashi
How to Make Awesome SlideShares: Tips & Tricks
by
Slideshare
Getting Started With SlideShare
by
Slideshare
Similar to Osc 2009 tokyo_moblin_20090220
PDF
Ylug 20090430 mamano
by
Mitz Amano
PDF
MeeGo Seminar Winter Porting 20101209
by
Mitz Amano
PDF
CSAJ MeeGo 20100423
by
Mitz Amano
PDF
Osc 2009 tokyo_moblin_20091030
by
Mitz Amano
PDF
はじめてのUserLAnd。AndroidでUbuntu,Debian ArchLinuxなどをprootで動かそう Beginner for inst...
by
Netwalker lab kapper
PDF
Osc2009 Sendai Xen 0124
by
Kazuhisa Hara
PDF
オープンソース - OSS進化論
by
Hiro Yoshioka
PPTX
Android組込み開発基礎コース Armadillo-440編
by
OESF Education
PDF
20年前のバックアップテープと格闘して思ったこと~TechLION vol.20
by
Kiyotaka Doumae
PDF
What's Operating System?
by
Naruhiko Ogasawara
PDF
仮想化技術によるマルウェア対策とその問題点
by
Kuniyasu Suzaki
PDF
講座Linux入門・デスクトップOSとしてのLinux
by
Tokai University
PDF
Lxc で始めるケチケチ仮想化生活?!
by
Etsuji Nakai
PDF
エバンジェリストが語るパワーシステム特論 ~ 第2回:『x86Linuxのスキルを活かしてPowerを使おう
by
Takumi Kurosawa
PDF
はじめてのpostmarketOSインストール Windowsタブレット #kagolug Beginner for install postmar...
by
Netwalker lab kapper
ODP
Co Linuxによる Windowsオンリー開発の不満をスッキリ解決! 7つの提案
by
福重 伸太朗
ODP
Debian emdebian 20100817
by
Toshihisa Tanaka
PDF
Ubuntu 12.04のご紹介
by
Hiroshi Chonan
PDF
Android が巨大すぎてお困りのあなたへ~組み込み Windows の今と、これから~
by
Shin-ya Koga
PDF
超激安WinタブレットにLinux、*BSDを入れよう 最新情報編 in KOF2018 Install Linux and Re-use 「newer ...
by
Netwalker lab kapper
Ylug 20090430 mamano
by
Mitz Amano
MeeGo Seminar Winter Porting 20101209
by
Mitz Amano
CSAJ MeeGo 20100423
by
Mitz Amano
Osc 2009 tokyo_moblin_20091030
by
Mitz Amano
はじめてのUserLAnd。AndroidでUbuntu,Debian ArchLinuxなどをprootで動かそう Beginner for inst...
by
Netwalker lab kapper
Osc2009 Sendai Xen 0124
by
Kazuhisa Hara
オープンソース - OSS進化論
by
Hiro Yoshioka
Android組込み開発基礎コース Armadillo-440編
by
OESF Education
20年前のバックアップテープと格闘して思ったこと~TechLION vol.20
by
Kiyotaka Doumae
What's Operating System?
by
Naruhiko Ogasawara
仮想化技術によるマルウェア対策とその問題点
by
Kuniyasu Suzaki
講座Linux入門・デスクトップOSとしてのLinux
by
Tokai University
Lxc で始めるケチケチ仮想化生活?!
by
Etsuji Nakai
エバンジェリストが語るパワーシステム特論 ~ 第2回:『x86Linuxのスキルを活かしてPowerを使おう
by
Takumi Kurosawa
はじめてのpostmarketOSインストール Windowsタブレット #kagolug Beginner for install postmar...
by
Netwalker lab kapper
Co Linuxによる Windowsオンリー開発の不満をスッキリ解決! 7つの提案
by
福重 伸太朗
Debian emdebian 20100817
by
Toshihisa Tanaka
Ubuntu 12.04のご紹介
by
Hiroshi Chonan
Android が巨大すぎてお困りのあなたへ~組み込み Windows の今と、これから~
by
Shin-ya Koga
超激安WinタブレットにLinux、*BSDを入れよう 最新情報編 in KOF2018 Install Linux and Re-use 「newer ...
by
Netwalker lab kapper
Osc 2009 tokyo_moblin_20090220
1.
Atom/Linuxの決定版! moblin.orgコミュニティとEmbedded MIRACLEの紹介
moblin.org / ミラクル・リナックス株式会社 天野 光隆 mamano@miraclelinux.com http://moblin.org
2.
自己紹介 天野 光隆(あまの みつたか) moblin.orgコミュニティに参加 2008年6月5日より、開発ツール(Moblin Image
Creator)のメンテナとして活動 その他、メーリングリスト上での技術サポート、 ディスカッション、ドキュメントレビューなど ミラクル・リナックス株式会社に勤務 Atom関連のディストリビューション開発、サポー ト担当 シンクライアントOSの開発、サポート担当 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 2
3.
アジェンダ moblin.org について moblin.orgの活動状況、今後 Fast bootについて moblin.orgを取り巻く状況 Embedded
MIRACLEのご紹介 WILLCOM D4 + Linux開発秘話 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 3
4.
moblin.orgについて
5.
moblin.org について 1/2 Linuxプラットフォームの構築を推進する
OSSプロジェクト MID、Netbook、車載情報システムなどの組 み込み機器向けがターゲット インテル (R) Atom(TM) プロセッサー搭載の H/W用に最適化されたソフトウェアコンポー ネントを提供 米インテル社主催のコミュニティ Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 5
6.
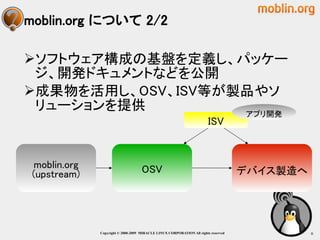
moblin.org について 2/2 ソフトウェア構成の基盤を定義し、パッケー
ジ、開発ドキュメントなどを公開 成果物を活用し、OSV、ISV等が製品やソ リューションを提供 アプリ開発 ISV moblin.org OSV (upstream) デバイス製造へ Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 6
7.
moblin.orgの活動状況と今後
8.
Moblin 1.0 Ubuntuの協力による開発 2007/07〜2008/07の間、開発が進む Moblin Image
Creatorによる開発環境構築、 起動イメージの作成(USB, CDブート, QEMU) 様々なOSVがmoblin1.0ベースのOSをリリー ス – Asianux Mobile 2.0(Redflag MIDINUX) – Ubuntu Mobile for Embedded(UME) Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 8
9.
Moblin 2.0 インテル社のエンジニア主体の開発へ 2008年8月から本格的に開発開始 2009年1月24日 Alpha1リリース
– Fast boot(ブートローダーからウィンドウマネー ジャ起動まで最速5秒) • http://www.youtube.com/watch?v=s7NxCM8ryF8 – Netbook向けの構成のみサポート Moblin Image Creator 2による起動イメージ の作成(Hyblid ISO, KVM image, VMDK etc) Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 9
10.
Moblin 2.0 GUI Tool
Kitとして「Clutter」を採用 OpenGL, OpenGL ESをバックエンドとして利用 することにより、よりリッチな外観、高速なアニメ ーション処理を実現する 英OpenedHand社が開発 Fast boot Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 10
11.
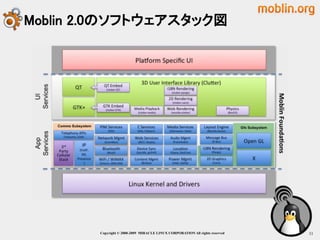
Moblin 2.0のソフトウェアスタック図
Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 11
12.
Fast bootについて
13.
Fast boot • 2008年9月に行われたLinux
Plumbers ConferenceでのIntel SSG/SSD Arjan van de Ven氏のによる資料より抜粋 • Arjan氏は元々kernelのFast bootに関する Contributeをしていた – kernelに対するFast bootの機能は、2.6.29-rc2 あたりから、Linusのツリーへマージされ始める • http://moblin.org/sites/all/files/u123/plum bers_fastboot.pdf Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 13
14.
Fast boot
高速起動を実現するために… – Kernelに対する適用 – init周りに対する適用 – Xに対する適用 – その他 サスペンド/レジュームなどのスナップショッ ト保存形式ではなく、コールドブートによる Fast boot 2009/02/20 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved
15.
Fast boot :
init周りに対する適用 Super Read Aheadによるファイル先読み – 集中的にキャッシュに落とすことで、以降のプロ グラム起動時間を早める sysvinitを使用 halのアルゴリズム処理に対する修正 2009/02/20 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved
16.
Fast boot :
Xに対する適用 Intelドライバ(xorg-x11-drv-intel)の余分な 遅延箇所をトリミング XKBの処理結果をあらかじめキャッシュ – CPPの実行が行われていた様子 2009/02/20 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved
17.
Fast boot :
その他 XFCEを採用 – GNOME, KDEよりも比較的軽快なデスクトップ 環境 ブートスプラッシュを使わない、コンソール 出力をしない等 2009/02/20 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved
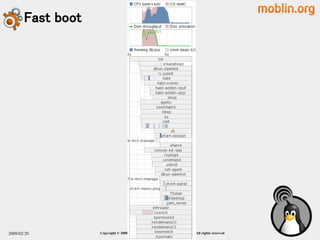
18.
Fast boot 2009/02/20
Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved
19.
moblin.orgを取り巻く状況
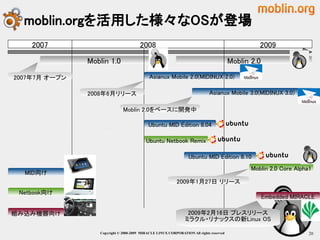
20.
moblin.orgを活用した様々なOSが登場
2007 2008 2009 Moblin 1.0 Moblin 2.0 2007年7月 オープン Asianux Mobile 2.0(MIDINUX 2.0) 2008年6月リリース Asianux Mobile 3.0(MIDINUX 3.0) Moblin 2.0をベースに開発中 Ubuntu MID Edition 8.04 Ubuntu Netbook Remix Ubuntu MID Edition 8.10 Moblin 2.0 Core Alpha1 MID向け 2009年1月27日 リリース Netbook向け Embedded MIRACLE 組み込み機器向け 2009年2月16日 プレスリリース ミラクル・リナックスの新Linux OS Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 20
21.
執筆記事、ニュース記事等 日経Linux 2008年9月号 (Moblin
1.0) AtomでモバイルLinuxに挑戦 IT media (Moblin 2.0) Atomミニノート向けLinux「Moblin」、αリリース Engadget 日本語版 (Moblin 2.0) ネットブック向け軽量Linux OS Moblin Coreアルファ版リリース Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 21
22.
Webページ: http://moblin.org/ moblin.orgメーリングリスト: dev@lists.moblin.org
23.
Embedded MIRACLEのご紹介
24.
Embedded MIRACLEとは • 2009年2月18日
日本経済産業新聞の記事 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 24
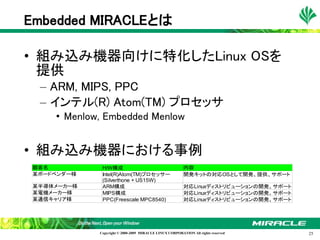
25.
Embedded MIRACLEとは • 組み込み機器向けに特化したLinux
OSを 提供 – ARM, MIPS, PPC – インテル(R) Atom(TM) プロセッサ • Menlow, Embedded Menlow • 組み込み機器における事例 顧客名 H/W構成 内容 某ボードベンダー様 Intel(R)Atom(TM)プロセッサー 開発キットの対応OSとして開発、提供、サポート (Silverthone + US15W) 某半導体メーカー様 ARM構成 対応Linuxディストリビューションの開発、サポート 某電機メーカー様 MIPS構成 対応Linuxディストリビューションの開発、サポート 某通信キャリア様 PPC(Freescale MPC8540) 対応Linuxディストリビューションの開発、サポート Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 25
26.
Menlow, Embedded Menlowの特徴 •
Poulsbo(コードネーム)である、System Controller Hub(SCH)に「PowerVR」を搭載 • 1チップ上(SCH)で3Dアクセラレーション、ハ ードウェアデコードを利用することが可能 • これらを、動かすためにはIntel(R) Embedded Graphics Drivers(IEGD)が必要 – http://www.intel.com/design/intarch/swsup/gr aphics_drivers.htm ミラクル・リナックスがIEGD対応のLinux OSを提供 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 26
27.
WILLCOM D4 +
Linux • WILLCOM D4向けに提供するLinuxディスト リビューション • 3月 提供予定 – Live USBイメージ – WILLCOM D4対応Moblin Image Creator • WILLCOM D4 + Windows Vistaの不満点を 解消 – 起動時間、アプリケーション起動時間 – バッテリー消費 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 27
28.
WILLCOM D4 +
Linux • 機能はシンプルに – Webブラウザ、メーラ、カメラ撮影、メディアプレ ーヤー等 • 技術評論社 Software Design より連載記事 – Software Design 2009年3月号 – 手を動かして,遊んでみよう ガジェット召還! – http://gihyo.jp/magazine/SD/archive/2009/20 0903 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 28
29.
WILLCOM D4 +
Linux開発秘話
30.
WILLCOM D4 +
Linux開発秘話 • デバイス対応が困難 – W-SIM : クローズドソース – ワンセグ : Linuxの実績がほとんどない – 3Dグラフィックドライバ : クローズドソース – 無線LAN : ファームウェアは再配布不可、ドライ バも不安定… – ACPI : 再起動ができない!サスペンド/レジュ ームもまともに動かず… • OSSのみの構成では限界があるが、できる ところまで実装する Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 30
31.
WILLCOM D4 +
Linux開発秘話 • Linux kernelの選定(+Fast boot) – 2.6.24(Ubuntu, Moblin 1.0) : Ubuntu Mobileで moblin 1.0のカーネルがより最適化されている ことを期待 – 2.6.29-rc2(Moblin 2.0) : Fast bootがどれほど適 用可能か – Moblin 2.0のkernelはNetbook向け(Atom Nxxx + ICH7 + 945GSE)しかないので、Menlow(Atom Zxxx + SCH)でそのままでは使えない • Menlow用のグラフィックモジュール(psb.ko)が使えな い • 様々な協議、検証の結果、2.6.24に決定 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 31
32.
WILLCOM D4 +
Linux開発秘話 • HDDインストール – Windows Vistaとのデュアルブートしたい等 – Windows Vistaのリカバリーアプローチも考慮 • Windows Vistaが作るリカバリー領域にイン ストールし、デュアルブート可能に(boot: linux install=dualboot) – D4のリカバリーDVDで一度復元すると、リカバ リー領域から復元できなくなるため、不要な領 域になる(ここを活用) – Moblin Image Creatorを使ってインストールイメ ージ作成可能 Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 32
33.
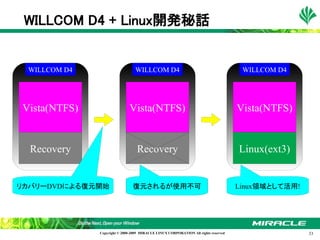
WILLCOM D4 +
Linux開発秘話 WILLCOM D4 WILLCOM D4 WILLCOM D4 Vista(NTFS) Vista(NTFS) Vista(NTFS) Recovery Recovery Linux(ext3) リカバリーDVDによる復元開始 復元されるが使用不可 Linux領域として活用! Copyright © 2000-2009 MIRACLE LINUX CORPORATION All rights reserved 33
34.
【お問い合わせ先】
info@miraclelinux.com http://www.miraclelinux.com ミラクル・リナックス株式会社 【無断転載を禁ず】 この文書はあくまでも参考資料であり、掲載されている情報は予告なしに変更されることがあります。ミラクル・リナック ス(株)は本書の内容に関していかなる保証もいたしません。また、本書の内容に関連したいかなる損害についても責 任を負いかねます。又、本資料の著作権は特に指定されている箇所を除いて、ミラクル・リナックスが有します。ミラク ル・リナックスが著作権を有するコンテンツにつきましては、ミラクル・リナックスに対して無断で複製、改変、頒布など をすることはできません。 MIRACLE LINUX の製品名、ロゴ、サービス名などは、ミラクル・リナックスが所有するか、使用権許諾を受けている 商標もしくは登録商標です。その他、本 Web サイトに掲載されている他社の製品名、ロゴなどは、それぞれ該当する 各社が所有する商標もしくは登録商標です。
35.
Q&A
36.
ご清聴ありがとうございました
Download