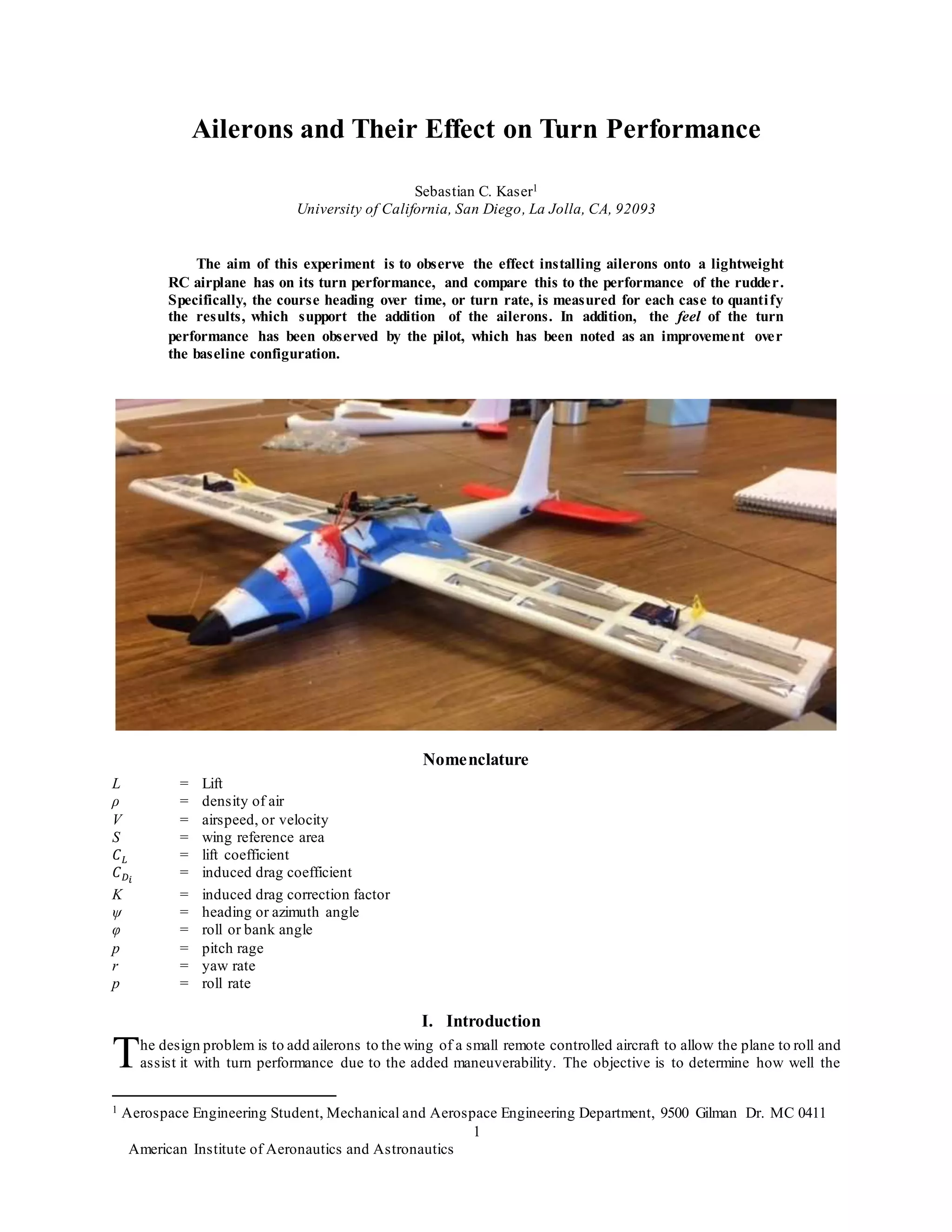
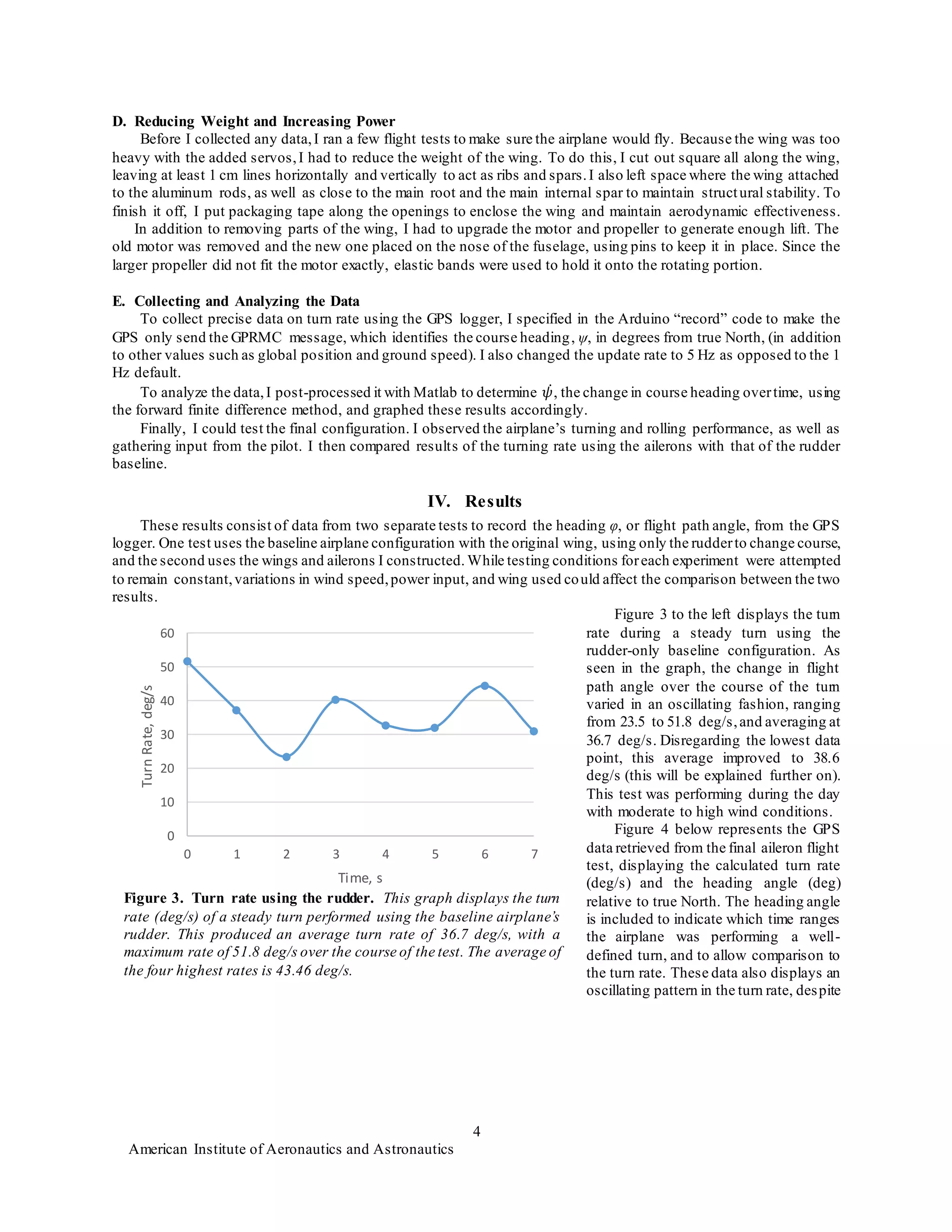
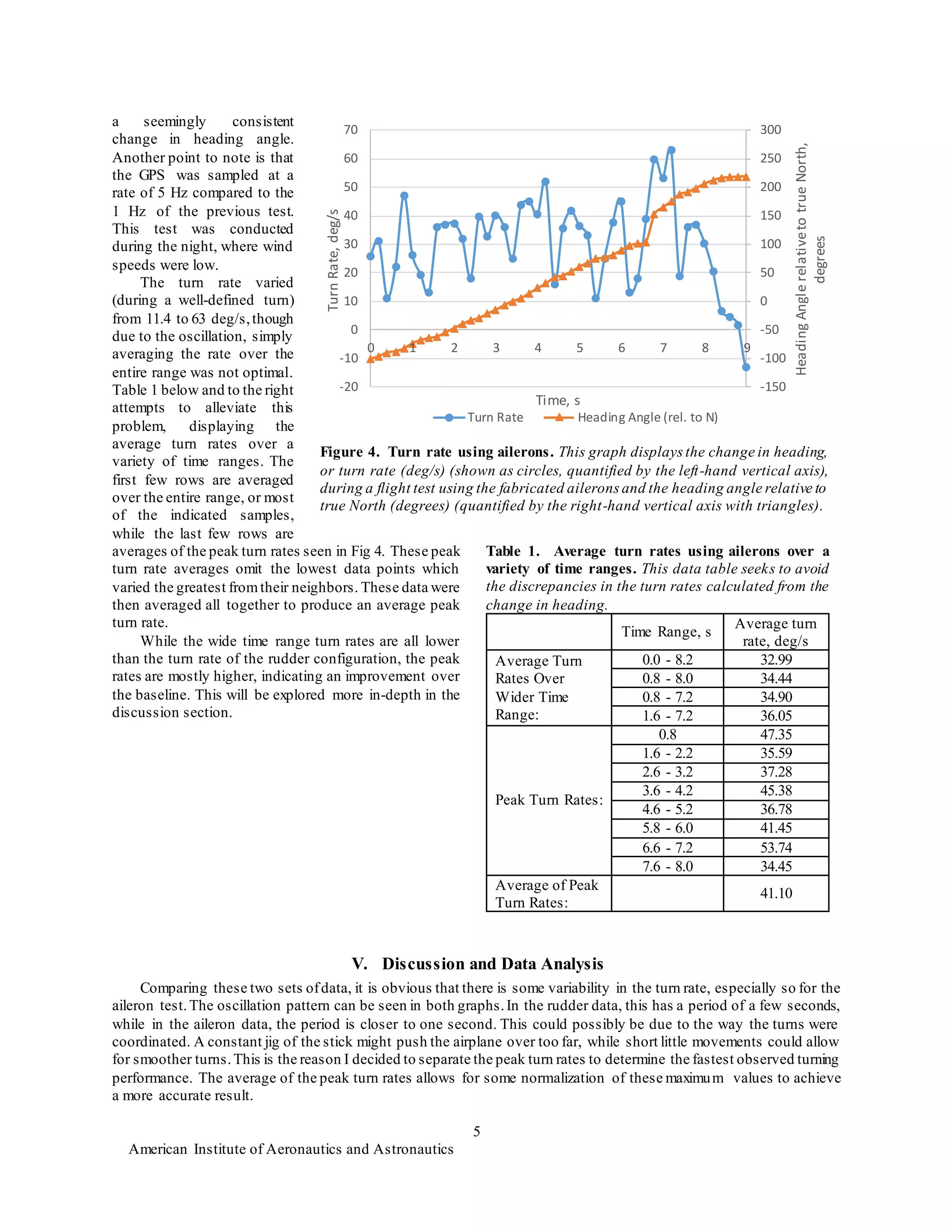
The document discusses an experiment to compare the turn performance of an RC airplane using ailerons versus using just the rudder. Flight tests were conducted to measure the turn rate for each case using a GPS data logger. Results showed the turn rate varied more when using ailerons but peak rates were mostly higher than when using just the rudder, indicating improved performance with the addition of ailerons. Some modifications were made to strengthen the wing and increase power to accommodate the added weight of the aileron control surfaces.

![American Institute of Aeronautics and Astronautics
3
While it is difficult to quantify a “coordinated turn”, it is possible to calculate 𝜓̇, the change in course heading
overtime (also referred to as the “turn rate”) using two Euler angles (course heading ψ and the roll ϕ) and the rotational
rates in a body-fixed frame (pitch rate q, yaw rate r, and roll rate p). This is shown in Eq. (3) below.
𝜙̇ = 𝑝 + tan 𝜃 ∗ (𝑞 ∗ 𝑠𝑖𝑛𝜙 + 𝑟 ∗ 𝑐𝑜𝑠𝜙) (3)4
These values require both an accelerometer and a magnetometer4, neither of which were used for this experiment.
However, similar results can be obtained with the use of a GPS logger. This is explained further in the experimental
procedure.
III. Experimental Procedure
A. Parts Used
• (1) Weekender eEyeHawk, by HiTec, containing:
fuselage assembly [with vertical stabilizer], main
wing, horizontal stabilizer, brushless outrunner
motor, 6-amp ESC, folding propeller, nano servos,
• (1) Minima6S, 2.4GHz, 6-Channel Aircraft
Receiver, by HiTec ,
• Radio transmitter,
• (1) or more 2S, 7.4V, 350 - 360 mAh LiPo battery,
• (1) charger for battery,
• (1) Arduino Micro,
• (2) Micro Servos (Adafruit 169),
• (1) Ultimate GPS Breakout v3 (Adafruit 1032),
• (1) I2c FRAM Breakout,
• (1) Adafruit Breadboard,
• wires,
• receiver / servo connecters,
• soldering tools,
• foam board of various thicknesses to make wings
and wing box,
• X-Acto knife,
• razor and 45 degree razor,
• music wire for servo connection with aileron,
• aluminum tubes for semi-spars,
• glue gun and hot glue, super glue, and quick
setting epoxy,
• fiber glass tape,
• (1) Cheetah 2204-14 brushless motor,
• (1) 8 x 3.8 APC propeller.
B. The First Assembly
My first assembly used the KFm-4 airfoil configuration, shown in Fig. 2 below, using three pieces of foam board,
one half mm thick, and two quarter mm thick. I also added a piece of balsa wood to the leading edge for extra support.
By drilling holes into the root sides of the wings and into anotherpiece of foam to fit into the fuselage, I configured
the wing to be attached from both sides using
two cut aluminum rods to position them and
act as semi-spars. I attached the servo, music
wire, and the servo clip to the ailerons using
hot glue, and used a 2-to-1 “fork” wire to
connect it to the receiver to properly direct
ailerons. To help reduce drag, I put a piece of
paper over the servos. I could then test my
assembly.
C. The Second Assembly
After the results of the first flight test,shown above,I decided to use a different method for my second assembly.
I made larger wings to account for the lift needed due to the added weight of the servos.Using the lift equation (see
Eq. (1)) and an estimated lift coefficient from the original wing, I determined the wing s ize needed. This time, I
constructed the new wing with .5 cm thick foam with paper on both sides.To do this, I first cut the ends with a razor
at 45 degree angle for streamline purposes, making a parallelogram shape. I then made a slice along foam at about
half-way to one-third down the middle, leaving the paper on the opposite side.I cut out a square on the shorter “half”
for the servo to fit into, and then folded the short end over to make an airfoil shape.Using some extra pieces of foam,
I created camber in the airfoil and a spar. I fitted in the servo and wires before gluing the airfoil togetherwith hot glue,
minimizing usage to preserve the foam’s low weight. I then cut out ailerons from the wing and used the 45 degree
razor to make a triangular edge at the hinge, and attached it back to the wing using fiber glass tape.I attached the servo
clips to aileron and used bent music wires to connect it with the servo. Finally, I pushed two aluminum rods through
center of the wing to connect themwith fuselage, as before.
Figure 2. KFm-4 Airfoil. The airfoil used for my first design.
This uses a 6-12% thickness,with top and bottomsteps at the 50%
chord. It is “fast, maneuverable, and gives a steady flight profile
across a wide speed range [making it a] great choice for
aerobatic plans.”5](https://image.slidesharecdn.com/2ac32918-d02c-4102-9e7b-80db423834fd-150611050844-lva1-app6891/75/AIAA-Technical-Paper-3-2048.jpg)

![American Institute of Aeronautics and Astronautics
8
Figure G. The semi-final assembly with packaging tape covering the holes in the wings.
Figures H/I. The final assembly, installed with an 8 in propeller and a Cheetah 2204-14 brushless motor to increase
the thrust and power.
Acknowledgments
I would like to thank Professor Mark Anderson, Karcher Morris, and Kaylee Feigum for their hard work and
commitment to helping our class succeed. The author would also like to thank the Department of Mechanical and
Aerospace Engineering at the University of California, San Diego, and Elioth Freijo, Nayelli Mondragon, David
Renteria, and Alex Akopian for their teamwork and cooperation throughout this project.
References
1
McLain, John E, “Understanding the Use of Rudder: Its Most Important Use is Preventing Yaw”, Empire Aviation [online
website], [published June 2001], URL: http://www.empire-aviation.com/flight-instructors/john-e-mclain/understanding-
the-use-of-rudder.html [cited 05 June 2015].
2
Davisson, Budd, “Technique: The Basic Turn”, Flight Training, AOPA [online website], [originally published in the
magazine Flight Training, April 2011], URL: http://flighttraining.aopa.org/magazine/2011/April/technique.html [cited 06
June 2015].
3
Anderson, Mark, “Level Flight Performance”, MAE 155 Aero [online website], [posted online during Winter 2015], URL:
https://sites.google.com/site/mae155aero/ [cited 07 June 2015].
4
Anderson, Mark, “Angular Rates”, MAE 142 Aero [online website], [posted online during Winter 2015], URL:
https://sites.google.com/site/mae142aero/ [cited 07 June 2015].
5
Kline, Richard, "Kline–Fogleman Airfoil", Wikipedia [online database], URL:
http://en.wikipedia.org/wiki/Kline%E2% 80%93Fogleman_airfoil [cited 05 June 2015].](https://image.slidesharecdn.com/2ac32918-d02c-4102-9e7b-80db423834fd-150611050844-lva1-app6891/75/AIAA-Technical-Paper-8-2048.jpg)