Downloaded 11 times








![An Example
C
DB
A
(8)(1)
(2)
[12]
4 5
5
[13]](https://image.slidesharecdn.com/ai4-heuristic2-150518184130-lva1-app6892/75/Ai4-heuristic2-13-2048.jpg)
![An Example
C
DB
A
(8)(4)
(2)
[15]
4 5
5
[13]
2](https://image.slidesharecdn.com/ai4-heuristic2-150518184130-lva1-app6892/75/Ai4-heuristic2-14-2048.jpg)
![An Example
C
DB
A
(3)(4)
G
E
(2)
(1)
(0)
[15]
4 5
5
2
2
4
[8]](https://image.slidesharecdn.com/ai4-heuristic2-150518184130-lva1-app6892/75/Ai4-heuristic2-15-2048.jpg)
![An Example
C
DB
A
(4)(4)
G
E
(2)
(3)
(0)
[15]
4 5
5
2
2
2
4
[9]
3](https://image.slidesharecdn.com/ai4-heuristic2-150518184130-lva1-app6892/75/Ai4-heuristic2-16-2048.jpg)
![An Example
C
DB
A
(4)
G
E
(2)
(3)
(0)
[15]
4 5
5
2
2
2
4
Solved
3
Solved
Solved](https://image.slidesharecdn.com/ai4-heuristic2-150518184130-lva1-app6892/75/Ai4-heuristic2-17-2048.jpg)


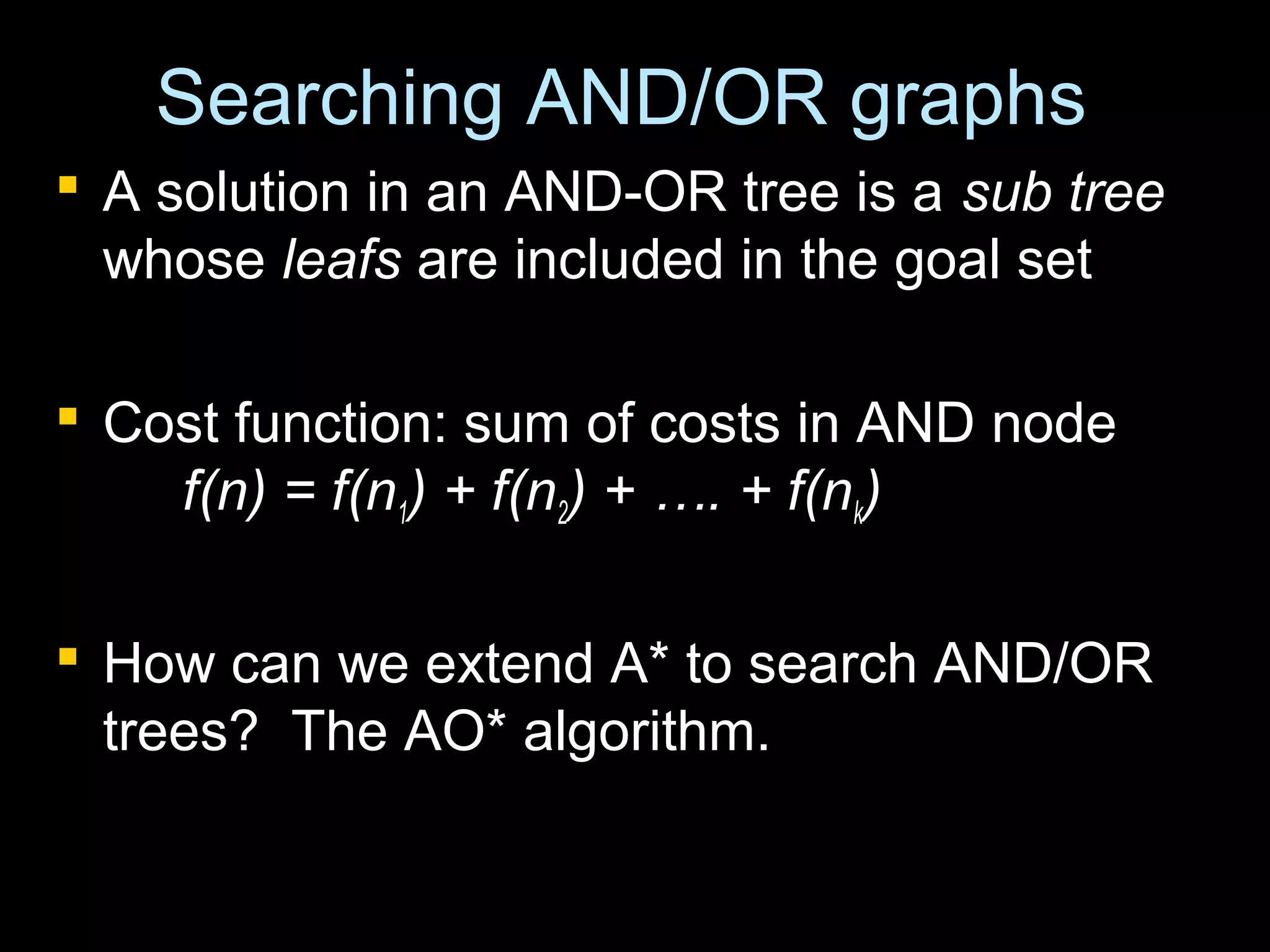
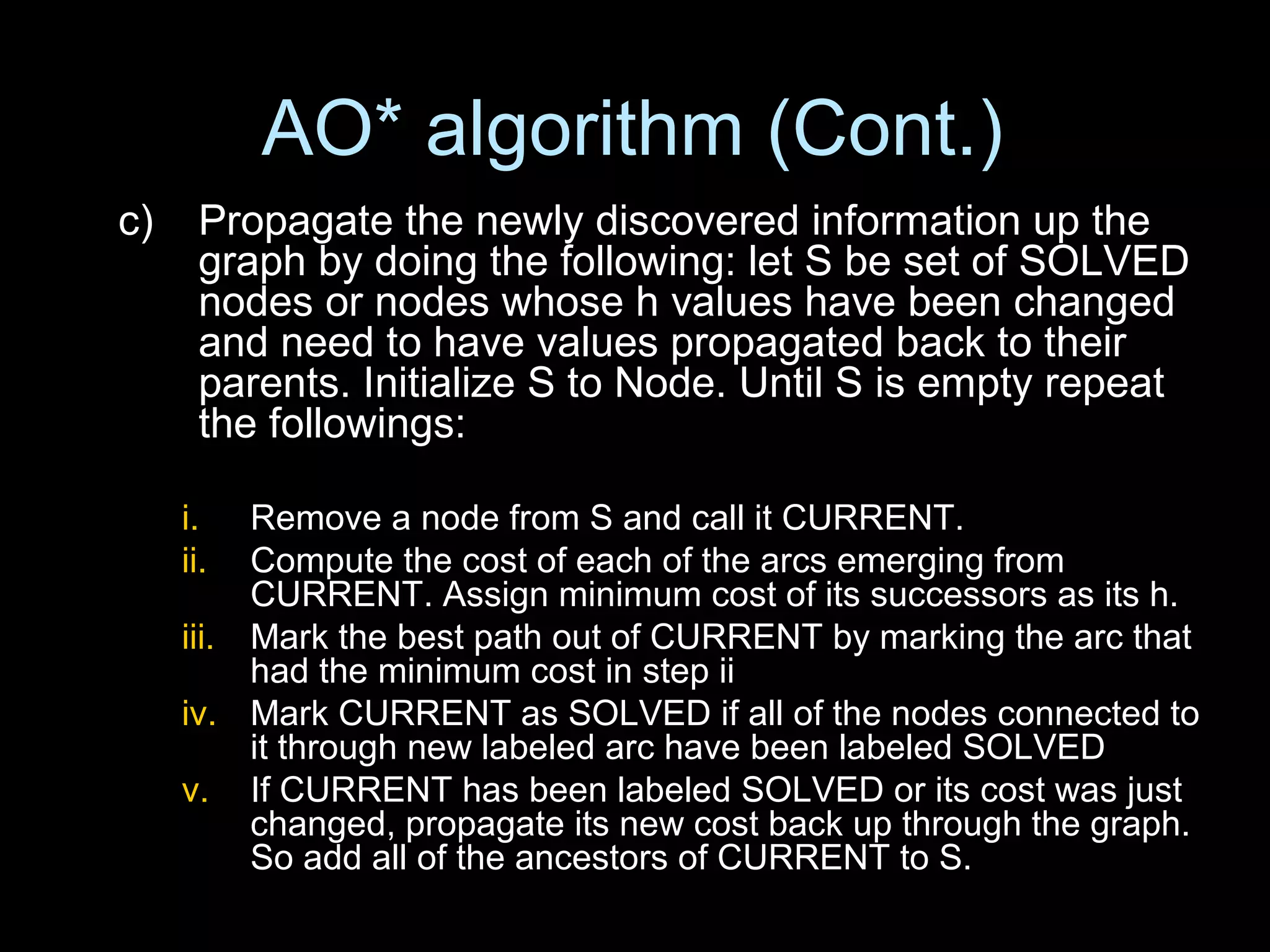
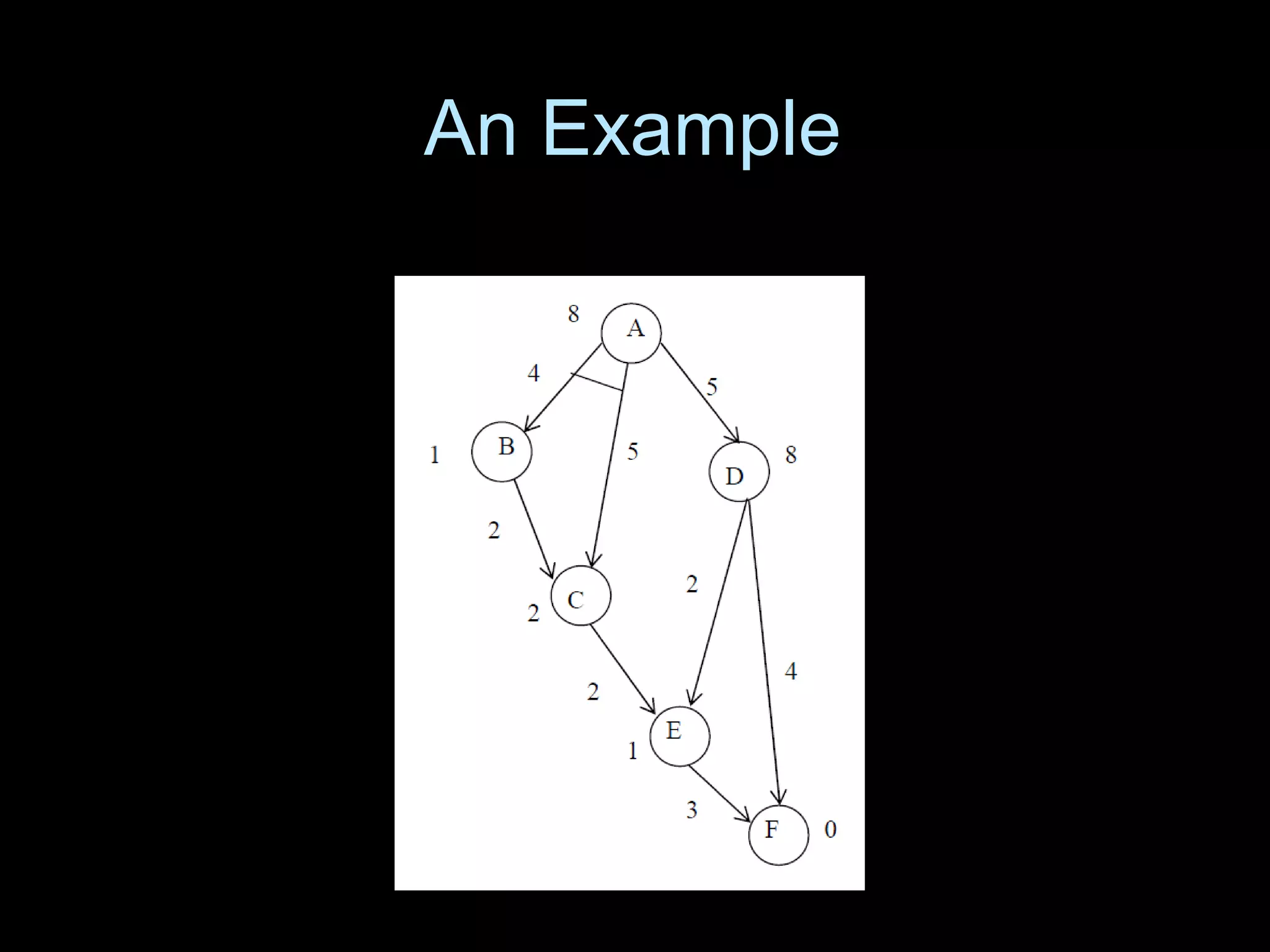
The document discusses AND/OR graphs and the AO* algorithm for searching AND/OR trees. Some problems can be represented as having subgoals that can be achieved simultaneously or independently (AND) or as OR options. The AO* algorithm extends A* search to AND/OR trees. It examines multiple nodes simultaneously, selecting the most promising path and expanding nodes to generate successors. It computes heuristic values (h) for nodes and propagates new information up the graph as the search progresses until a solution is found or all paths are determined to be unsolvable. An example demonstrates how AO* searches an AND/OR graph and labels nodes as it proceeds.





































![Heuristic in AI (Rule of thumb) [what, why, how] What: Mental shortcuts that ...](https://cdn.slidesharecdn.com/ss_thumbnails/3-5-week-250901055018-f7c36e71-thumbnail.jpg?width=640&height=640&fit=bounds)