Recommended
PDF
Towards Faster and Stabilized GAN Training for High-fidelity Few-shot Image S...
PPTX
Recursively Summarizing Books with Human Feedback
PDF
AGenT Zero: Zero-shot Automatic Multiple-Choice Question Generation for Skill...
PPTX
ロードヒーティング制御における深層学習を用いた路面画像認識に関する研究
PPTX
PPTX
PDF
PPTX
PPTX
You Only Learn One Representation: Unified Network for Multiple Tasks
PDF
Real-Time Semantic Stereo Matching
PPTX
PPTX
Calorie Estimation in a Real-World Recipe Service
PPTX
MASTERING ATARI WITH DISCRETE WORLD MODELS (DreamerV2)
PPTX
Which is Plagiarism: Fashion Image Retrieval based on Regional Representation...
PPTX
PredCNN: Predictive Learning with Cascade Convolutions
PPTX
PPTX
Can increasing input dimensionality improve deep reinforcement learning?
PDF
Understanding Blackbox Predictions via Influence Functions
PDF
Trainable Calibration Measures for Neural Networks from Kernel Mean Embeddings
PDF
Capsule Graph Neural Network
PPTX
PPTX
Mutual Mean-Teaching:Pseudo Label Refinery for Unsupervised Domain Adaption o...
PPTX
Efficient_Communication_in_Multi-Agent_Reinforcement_Learning_via_Variance_Ba...
PDF
交差点の交通流におけるシミュレーション環境 を用いた深層強化学習に関する研究
PDF
PPTX
Outfit net fashion outfit recommendation with attention based multiple instan...
PPTX
ECサイトにおける商品紹介文の作成支援システムの開発と評価に関する研究
PDF
Depth Prediction Without the Sensors: Leveraging Structure for Unsupervised L...
PPTX
Colorful image colorization
PPTX
More Related Content
PDF
Towards Faster and Stabilized GAN Training for High-fidelity Few-shot Image S...
PPTX
Recursively Summarizing Books with Human Feedback
PDF
AGenT Zero: Zero-shot Automatic Multiple-Choice Question Generation for Skill...
PPTX
ロードヒーティング制御における深層学習を用いた路面画像認識に関する研究
PPTX
PPTX
PDF
PPTX
What's hot
PPTX
You Only Learn One Representation: Unified Network for Multiple Tasks
PDF
Real-Time Semantic Stereo Matching
PPTX
PPTX
Calorie Estimation in a Real-World Recipe Service
PPTX
MASTERING ATARI WITH DISCRETE WORLD MODELS (DreamerV2)
PPTX
Which is Plagiarism: Fashion Image Retrieval based on Regional Representation...
PPTX
PredCNN: Predictive Learning with Cascade Convolutions
PPTX
PPTX
Can increasing input dimensionality improve deep reinforcement learning?
PDF
Understanding Blackbox Predictions via Influence Functions
PDF
Trainable Calibration Measures for Neural Networks from Kernel Mean Embeddings
PDF
Capsule Graph Neural Network
PPTX
PPTX
Mutual Mean-Teaching:Pseudo Label Refinery for Unsupervised Domain Adaption o...
PPTX
Efficient_Communication_in_Multi-Agent_Reinforcement_Learning_via_Variance_Ba...
PDF
交差点の交通流におけるシミュレーション環境 を用いた深層強化学習に関する研究
PDF
PPTX
Outfit net fashion outfit recommendation with attention based multiple instan...
PPTX
ECサイトにおける商品紹介文の作成支援システムの開発と評価に関する研究
PDF
Depth Prediction Without the Sensors: Leveraging Structure for Unsupervised L...
Viewers also liked
PPTX
Colorful image colorization
PPTX
PDF
Generating Videos with Scene Dynamics
PPTX
Globally and Locally Consistent Image Completion
PDF
Deep Forest: Towards An Alternative to Deep Neural Networks
PPTX
PDF
Deeply-Recursive Convolutional Network for Image Super-Resolution
PPTX
PPTX
PDF
PPTX
PPTX
PPTX
Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Network
PPTX
A simple neural network mnodule for relation reasoning
PPTX
Densely Connected Convolutional Networks
PPTX
PDF
【2016.01】(2/3)cvpaper.challenge2016
PDF
【2016.02】cvpaper.challenge2016
PDF
【2016.01】(3/3)cvpaper.challenge2016
PDF
【2016.01】(1/3)cvpaper.challenge2016
Similar to Ai勉強会20170127
PDF
Deep Neural Networkに基づく日常生活行動認識における適応手法
PDF
【チュートリアル】動的な人物・物体認識技術 -Dense Trajectories-
PDF
【2016.04】cvpaper.challenge2016
PDF
PDF
動作認識におけるディープラーニングの最新動向2Sequential DL for HAR
PPTX
When will you do what? - Anticipating Temporal Occurrences of Activities (CVP...
PDF
研究室輪読 Feature Learning for Activity Recognition in Ubiquitous Computing
PDF
PDF
cvpaper.challenge@CVPR2015(Action Recognition)
PPTX
[DL輪読会]Human Dynamics from Monocular Video with Dynamic Camera Movements
PDF
論文紹介:ActionSwitch: Class-agnostic Detection of Simultaneous Actions in Stream...
PDF
深層学習によるHuman Pose Estimationの基礎
PDF
【チュートリアル】コンピュータビジョンによる動画認識 v2
More from harmonylab
PDF
A Study on a Generation Method for Keirin Rider Introduction Articles Using R...
PDF
METAGPT: META PROGRAMMING FOR A MULTI-AGENT COLLABORATIVE FRAMEWORK
PDF
【修士論文】印象タグに基づく客観的特徴を用いた反復型衣服画像生成システムに関する研究
PDF
Research on Manual Creation Support Based on Technical Writing Using Large La...
PDF
Collaborative Document Simplification Using Multi-Agent Systems
PDF
Can Large Language Models perform Relation-based Argument Mining?
PDF
UniPAD: A Universal Pre-training Paradigm for Autonomous Driving
PDF
Efficient anomaly detection in tabular cybersecurity data using large languag...
PDF
APT-LLM Embedding-Based Anomaly Detection of Cyber Advanced Persistent Threat...
PDF
CTINexus: Automatic Cyber Threat Intelligence Knowledge Graph Construction Us...
PDF
Mixture-of-Personas Language Models for Population Simulation
PDF
QuASAR: A Question-Driven Structure-Aware Approach for Table-to-Text Generation
PDF
Large Language Model based Multi-Agents: A Survey of Progress and Challenges
PDF
Mixture-of-Personas Language Models for Population Simulation
PDF
TransitReID: Transit OD Data Collection with Occlusion-Resistant Dynamic Pass...
PDF
Data Scaling Laws for End-to-End Autonomous Driving
PDF
DeepSeek-R1: Incentivizing Reasoning Capability in LLMs via Reinforcement Lea...
PDF
Is Ego Status All You Need for Open-Loop End-to-End Autonomous Driving?
PDF
Encoding and Controlling Global Semantics for Long-form Video Question Answering
PDF
AECR: Automatic attack technique intelligence extraction based on fine-tuned ...
Ai勉強会20170127 1. On-line Deep Learning Method
for Action Recognition
北海道大学大学院 情報科学研究科 情報理工学専攻
複雑系工学講座 調和系工学研究室
修士1年 小山望海
2017年1月27日(金)
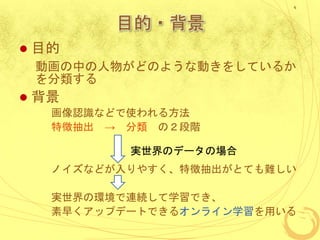
- 行動認識のためのオンライン深層学習法-
Charalampous, Konstantinos, and Antonios Gasteratos.
Pattern Analysis and Applications 19.2 (2016)
2. 3. 論文について
掲載されている論文誌
Pattern Analysis and Applications(2016)
パターン解析とアプリケーション
新規パターン分析技術、ならびに産業および医療用途を
記述する元の研究を提示
画像処理、音声分析、文書分析、文字認識、パターン認
識など、パターン認識と解析のための新しい技術
統計的手法、ニューラルネットワーク、機械学習など、
高度な手法の使用も検討されてる。
3
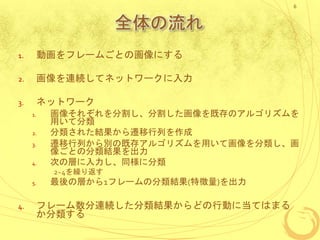
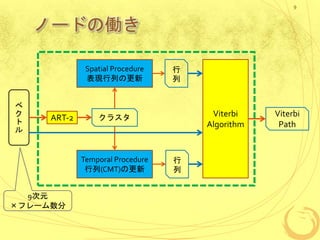
4. 5. 6. 全体の流れ
1. 動画をフレームごとの画像にする
2. 画像を連続してネットワークに入力
3. ネットワーク
1. 画像それぞれを分割し、分割した画像を既存のアルゴリズムを
用いて分類
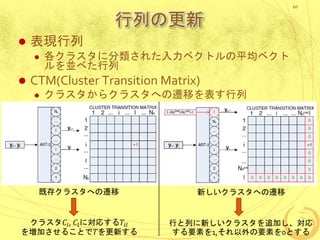
2. 分類された結果から遷移行列を作成
3. 遷移行列から別の既存アルゴリズムを用いて画像を分類し、画
像ごとの分類結果を出力
4. 次の層に入力し、同様に分類
2~4を繰り返す
5. 最後の層から1フレームの分類結果(特徴量)を出力
4. フレーム数分連続した分類結果からどの行動に当てはまる
か分類する
6
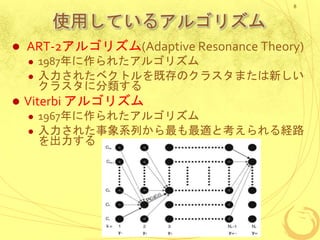
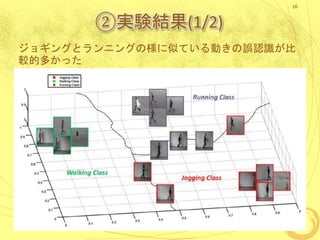
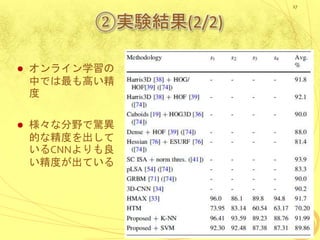
7. 8. 9. 10. 11. 12. 評価実験
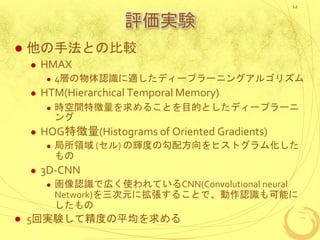
他の手法との比較
HMAX
4層の物体認識に適したディープラーニングアルゴリズム
HTM(Hierarchical Temporal Memory)
時空間特徴量を求めることを目的としたディープラーニ
ング
HOG特徴量(Histograms of Oriented Gradients)
局所領域 (セル) の輝度の勾配方向をヒストグラム化した
もの
3D-CNN
画像認識で広く使われているCNN(Convolutional neural
Network)を三次元に拡張することで、動作認識も可能に
したもの
5回実験して精度の平均を求める
12
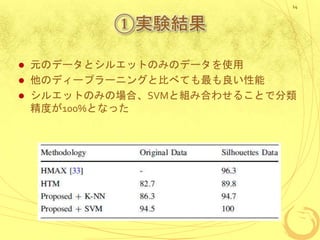
13. 14. 15. ②KTH Human Action Dataset
15
25人が4つの異なるシチュエーションで6つの動きを撮影
160×120pixels
outdoors
outdoors with
scale variation
outdoors in
different clothes
lighting diversity
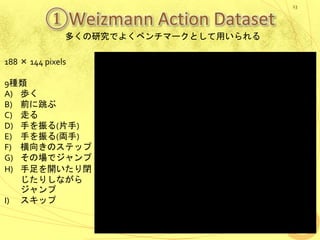
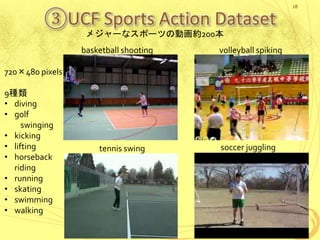
16. 17. 18. ③UCF Sports Action Dataset
18
basketball shooting volleyball spiking
tennis swing soccer juggling
メジャーなスポーツの動画約200本
720×480 pixels
9種類
• diving
• golf
swinging
• kicking
• lifting
• horseback
riding
• running
• skating
• swimming
• walking
19. 20.























































![[DL輪読会]Human Dynamics from Monocular Video with Dynamic Camera Movements](https://cdn.slidesharecdn.com/ss_thumbnails/slidesharehumandynamicsfrommonocularvideowithdynamiccameramovements-220225034931-thumbnail.jpg?width=640&height=640&fit=bounds)






















