Downloaded 15 times
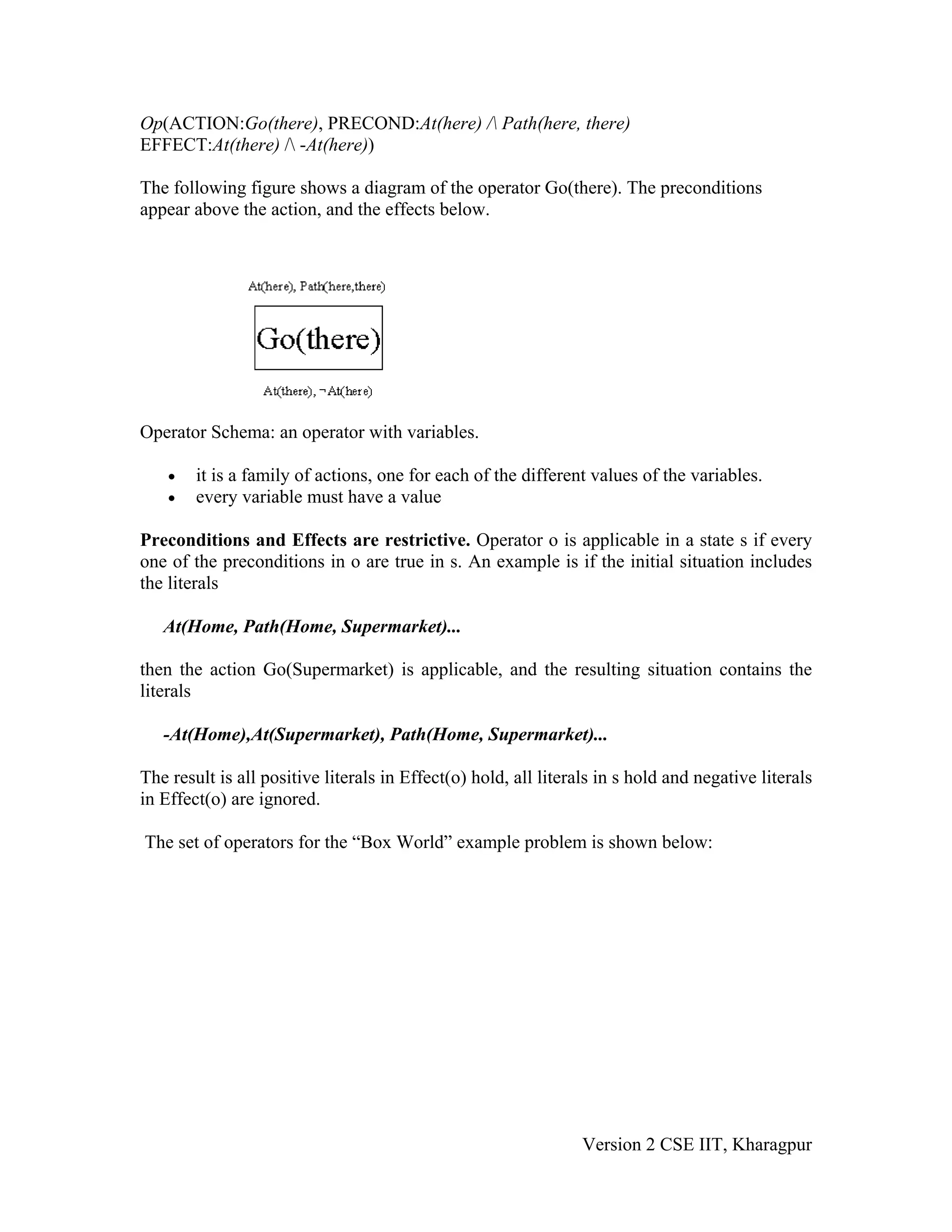
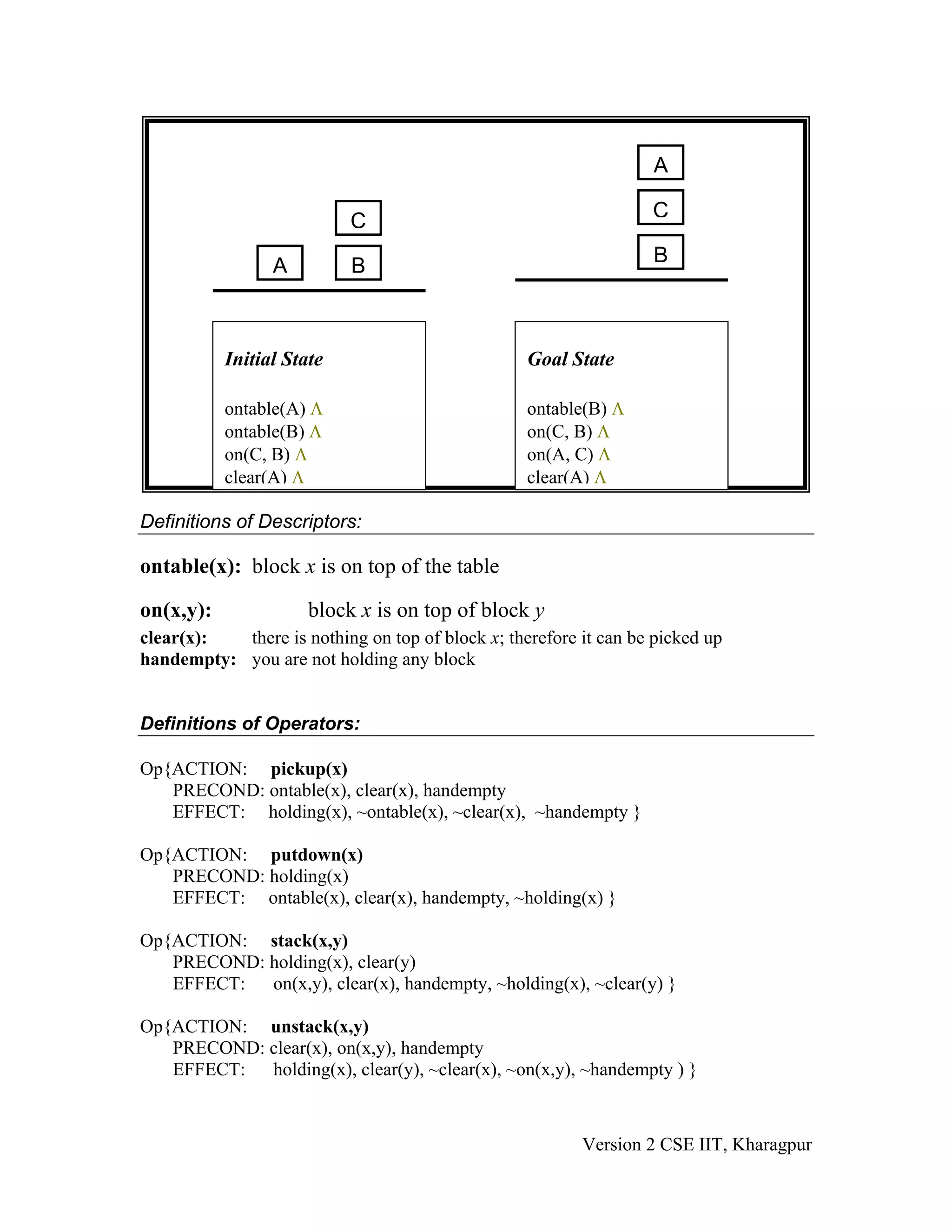

This document discusses planning systems and how they represent states, goals, and actions. It describes how states are represented by conjunctions of literals and goals can contain variables. Actions in planning systems have preconditions that must be true for the action to occur and effects that describe how the state changes. It provides an example of the blocks world planning problem and defines the state descriptors and operators for that domain.