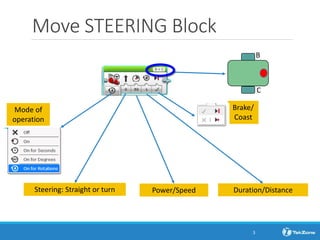

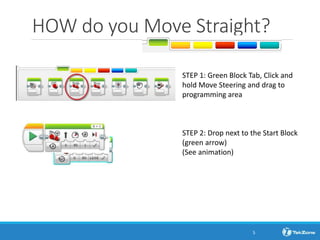
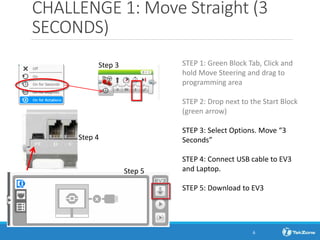
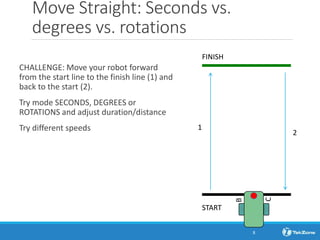
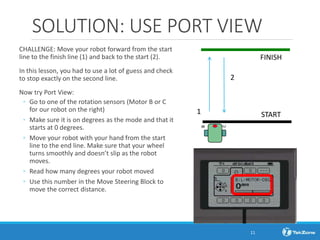

This document provides a lesson on using the Move Steering block to make a robot move straight in EV3 programming. It teaches how to (1) make the robot go forward and backward using positive and negative power, (2) use the Move Steering block to move for a set number of seconds, degrees, or rotations, and (3) read sensor values using Port View. Learners are challenged to use different parameters to move straight between start and finish lines, and it is noted that using Port View to measure wheel rotations is a better method than guess and check.



































































