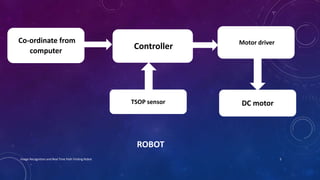
The document describes an image recognition and real-time path finding robot. The robot uses image recognition to identify obstacles from a top-down photo of the path and navigates to the destination autonomously. Sensors allow the robot to detect and avoid obstacles in real-time. Calculations are done to determine the robot's position from the image and translate it to physical coordinates to find the path. Hardware components include motors, sensors, and a microcontroller. Software includes MATLAB for image processing and path calculation.