









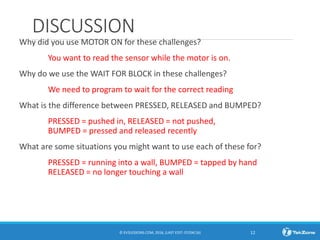


1. This document provides a lesson on using the Touch Sensor with the EV3 robot. It explains that the Touch Sensor can detect when its button is pressed, released, or bumped and programs can be written to trigger actions based on these states. 2. It compares using the Touch Sensor block in the yellow sensor tab to read the sensor versus using a Wait for Touch block in the orange flow tab. The Wait for block waits for a particular sensor state while other actions can occur. 3. The document provides examples of programs to move a robot forward until the Touch Sensor is pressed or until it hits a wall, then back up and turn using the Touch Sensor and Wait for blocks.



































































