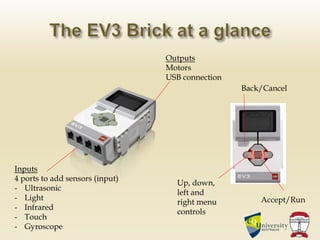
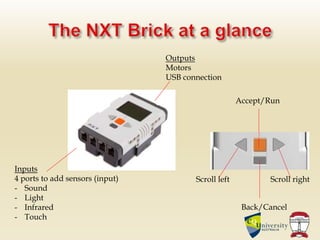
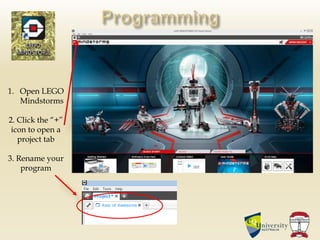
This document provides information about robotics and the Lego EV3 platform. It discusses the parts of robotics, including construction and programming. It also outlines some of the sensors and inputs/outputs available in the EV3 kit and provides programming examples for controlling motors and using sensors. Programming with the EV3 software involves dragging and dropping icon-based blocks. The document aims to teach basic robotics concepts and programming skills.