

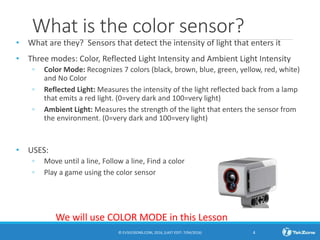

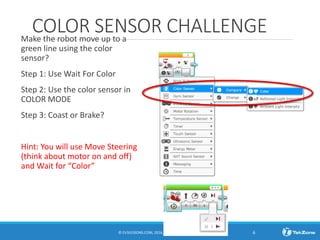
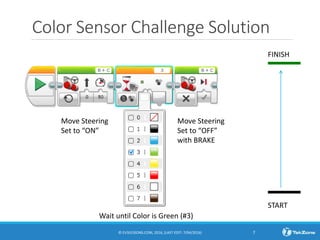


This document provides a lesson on using the color sensor with the EV3 robot. It discusses the objectives of learning how to use the color sensor and about the coast and brake functions. It describes what sensors are and the different sensor types including the color sensor. It explains the three modes of the color sensor - color, reflected light intensity, and ambient light intensity. It presents a challenge to have the robot move up to a green line using the color sensor and wait for color block. It discusses whether to use coast or brake in the move steering block to stop exactly on the line.