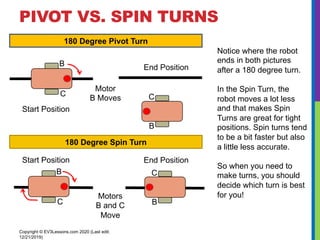
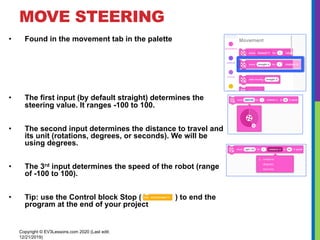
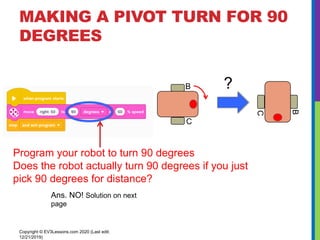
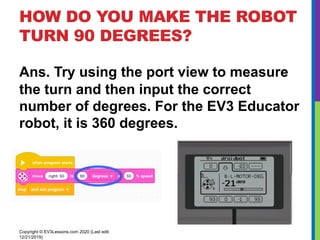
This document teaches the differences between pivot and spin turns for robots and how to program them. Pivot turns involve rotating around the center point while spin turns rotate around the outer wheels, allowing the robot to turn within a smaller space. The document provides examples of programming 90 and 180 degree turns and discusses when each type of turn would be best to use. It also introduces using pseudocode to plan programs before writing the actual code.