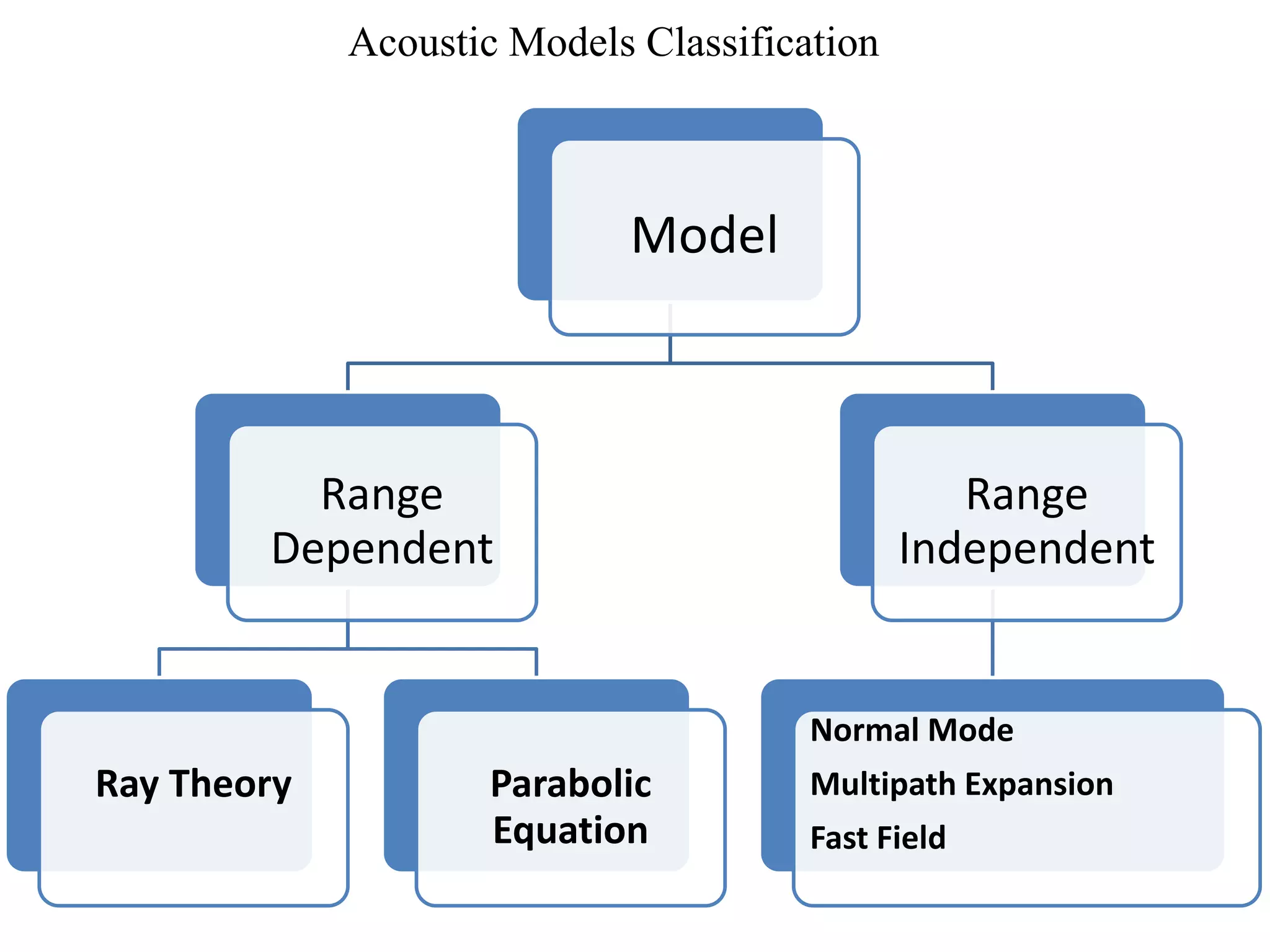
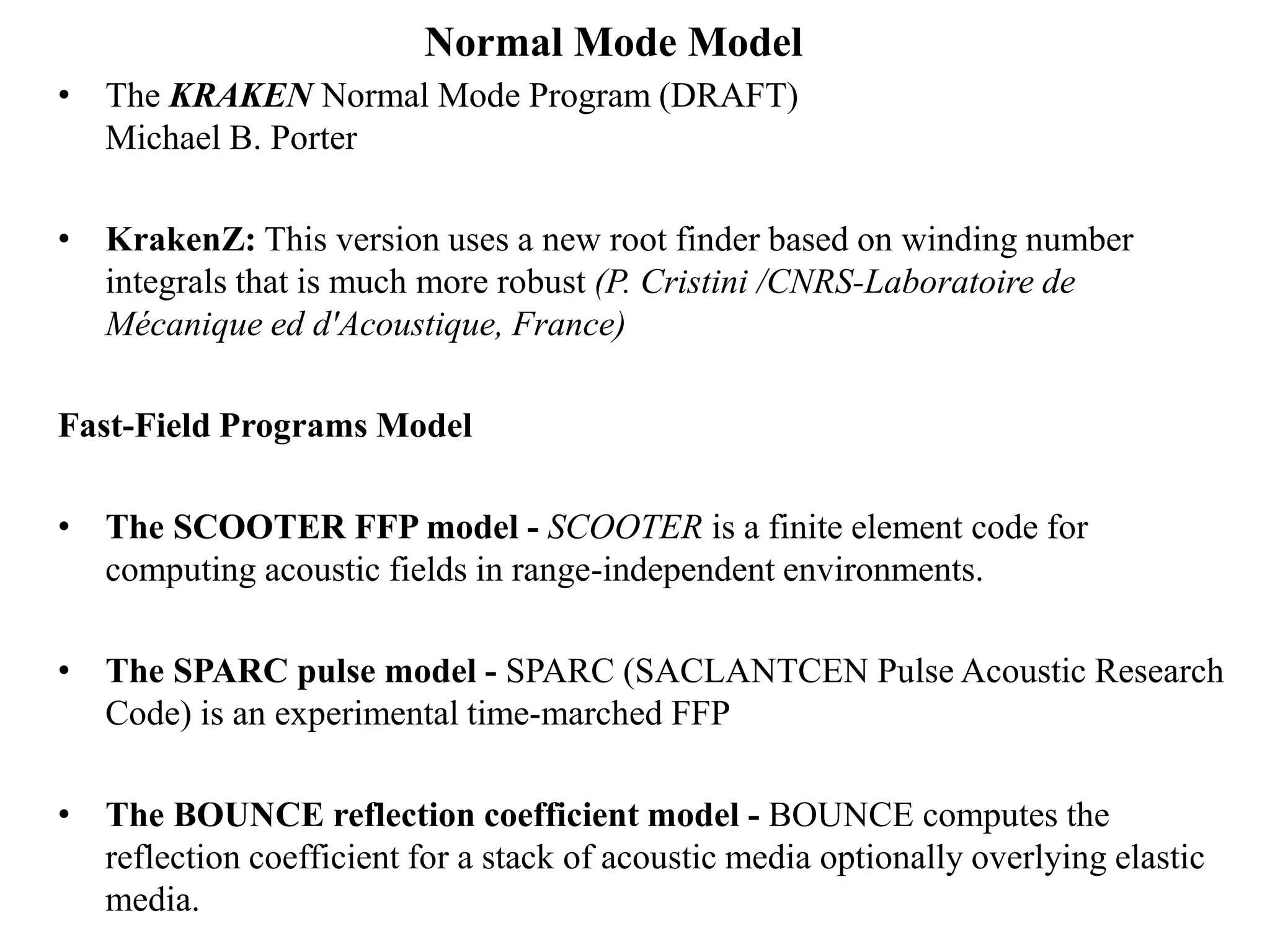
The document discusses acoustic modeling techniques for underwater sound propagation. It provides an overview of several common modeling approaches, including ray theory models, normal mode models, multipath expansion models, fast field models, and parabolic equation models. It also discusses how these approaches relate to solving the acoustic wave equation and Helmholtz equation. The key steps of ray theory modeling are outlined, including derivation of the eikonal and transport equations from the Helmholtz equation.









![RAY-THEORY MODEL
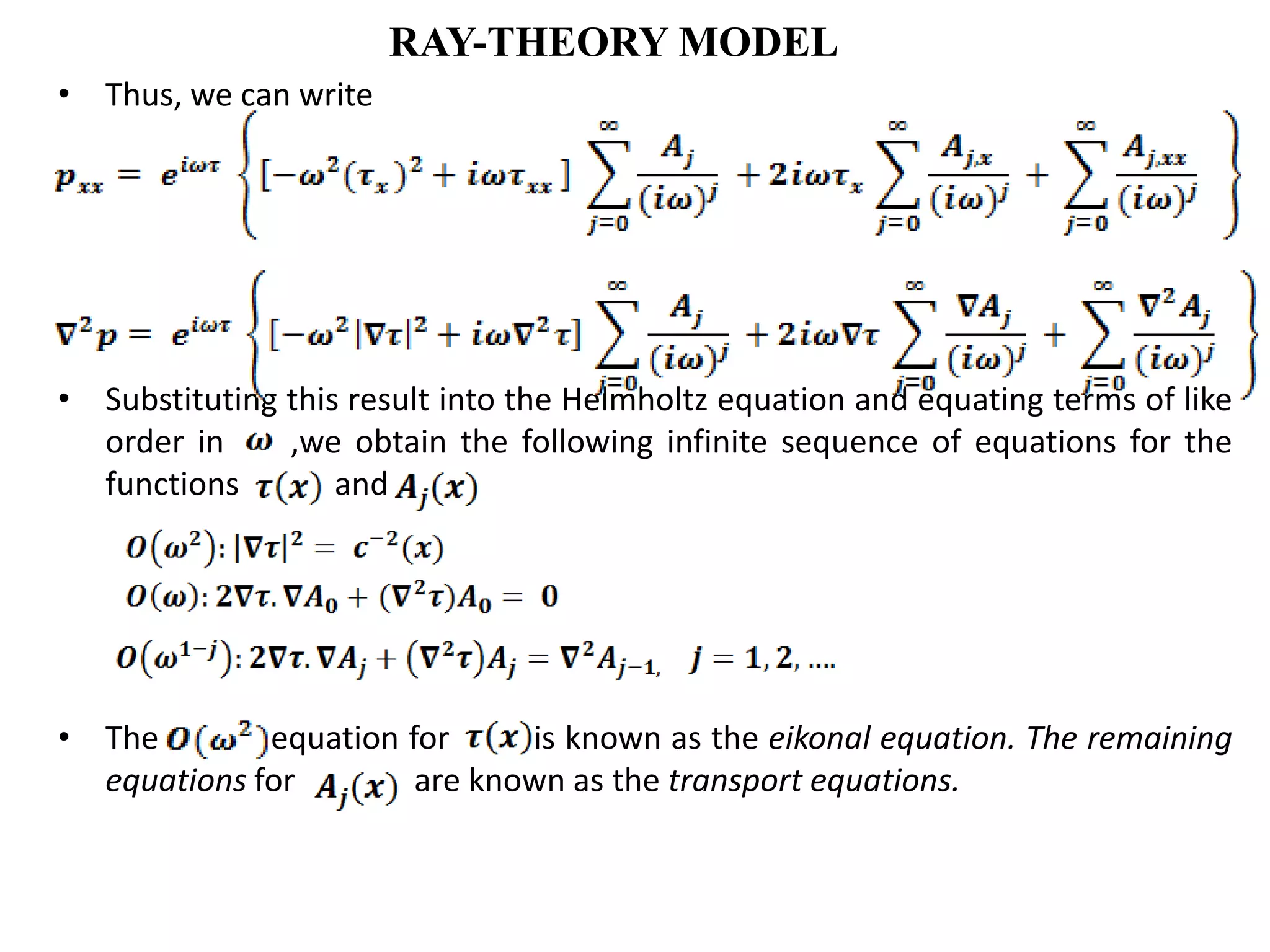
Using this can be written as
Then, using the eikonal equation, to replace the terms in square brackets, we
Obtain
By applying this process to each of the coordinates, we obtain the following
vector equation for the ray trajectories,
In cylindrical coordinates (r,z), these ray equations may be written in the first-
order form
where [r(s), z(s)] is the trajectory of the ray in the range–depth plane. We have
introduced the auxiliary variables and in order to write the equations in
first-order form.](https://image.slidesharecdn.com/acousticmodel-230914034010-1e28eeb9/75/Acoustic-Model-pptx-18-2048.jpg)
![RAY-THEORY MODEL
Recall that the tangent vector to a curve [r(s), z(s)] parameterized by arc length is
given by [dr/ds, dz/ds]. Thus, from the above equations the tangent vector to the
ray is
normal vectors to the ray:
One may immediately verify that tray .nray =0. The tangent and normal are, of
course, arbitrary with respect to sign. However, to complete the specification of
the rays we also need initial conditions.
As indicated in Fig. 3.3, the initial conditions are that the ray starts at the source
position [ro, zo] with a specified take-off angle . Thus, we have](https://image.slidesharecdn.com/acousticmodel-230914034010-1e28eeb9/75/Acoustic-Model-pptx-19-2048.jpg)