Download to read offline
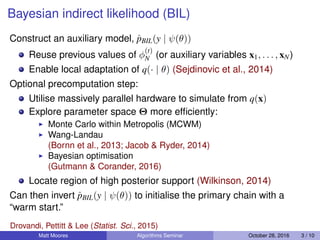
![Multiplicative Noise
Can’t evaluate p(y|θ) pointwise, but by lognormal CLT:
φ
(t)
N = W p y | θ(t)
(2)
E[W] = 1 (3)
log{W}
d
−−−−→
N→∞
N −
1
2
σ2
, σ2
(4)
when x1, . . . , xN are generated from a particle filter
(Bérard, Del Moral & Doucet, 2014)
We can account for this noise by adding a nugget term to our GP:
− log ˆφ
(j)
N ∼ N mβ(θ) +
δ
2
, cγ(θ, θ ) + δI (5)
where θ(j), φ
(j)
N
J
j=1
are obtained from the precomputation step
Matt Moores Algorithms Seminar October 28, 2016 6 / 10](https://image.slidesharecdn.com/talk-alg-170124175307/85/Accelerating-Pseudo-Marginal-MCMC-using-Gaussian-Processes-6-320.jpg)
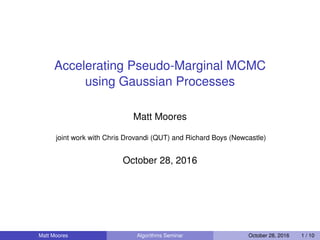
![Delayed Acceptance (DA)
Algorithm 2 BIL with DA
Input: θ(t−1) ∈ Θ, φ
(t−1)
N = ˆp(y | θ(t−1))
1: Propose θ ∼ q(· | θ(t−1))
2: Calculate αBIL = 1 ∧ ˆpBIL(y|ψ(θ )) p(θ ) q(θ(t−1)|θ )
ˆpBIL(y|ψ(θ(t−1))) p(θ(t−1)) q(θ |θ(t−1))
Output: return (θ(t−1), φ
(t−1)
N ) with probability 1 − α, else
3: Obtain φN as per Alg. 1
4: Calculate αDA = 1 ∧
φN ˆpBIL(y|ψ(θ(t−1)))
φ
(t−1)
N ˆpBIL(y|ψ(θ ))
Output: return (θ , φN) with probability αDA, else return (θ(t−1), φ
(t−1)
N )
Matt Moores Algorithms Seminar October 28, 2016 7 / 10
Christen & Fox (JCGS, 2005)
Sherlock, Golightly & Henderson (arXiv:1509.00172 [stat.CO])](https://image.slidesharecdn.com/talk-alg-170124175307/85/Accelerating-Pseudo-Marginal-MCMC-using-Gaussian-Processes-7-320.jpg)
![For Further Reading
C. C. Drovandi, M. Moores & R. Boys
Accelerating Pseudo-Marginal MCMC using Gaussian Processes.
Tech. Rep., QLD Univ. of Tech., 2015.
M. Moores, C. C. Drovandi, K. Mengersen & C. P. Robert
Pre-processing for approximate Bayesian computation in image analysis.
Statistics & Computing 25(1): 23–33, 2015.
C. C. Drovandi, A. N. Pettitt & A. Lee
Bayesian indirect inference using a parametric auxiliary model.
Statist. Sci. 30(1): 72–95, 2015.
M. Moores, A. N. Pettitt & K. Mengersen
Scalable Bayesian inference for the inverse temperature of a hidden Potts model.
arXiv:1503.08066 [stat.CO], 2015.
C. C. Drovandi, A. N. Pettitt & M. J. Faddy
Approximate Bayesian computation using indirect inference.
J. R. Stat. Soc. Ser. C 60(3): 317–337, 2011.
Matt Moores Algorithms Seminar October 28, 2016 10 / 10](https://image.slidesharecdn.com/talk-alg-170124175307/85/Accelerating-Pseudo-Marginal-MCMC-using-Gaussian-Processes-10-320.jpg)

The document discusses the acceleration of pseudo-marginal Markov Chain Monte Carlo (MCMC) methods using Gaussian processes in the context of Bayesian statistics. It presents various algorithms and techniques for improving the efficiency and scalability of these methods, focusing on the Bayesian indirect likelihood and adaptive algorithms. Key components include the utilization of auxiliary models and the optimization of computational resources through parallel precomputation.