Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Takami Sato
PDF, PPTX
5,682 views
NIPS2016論文紹介 Riemannian SVRG fast stochastic optimization on riemannian manifolds
勉強会で枠が余ったら話そうと思ってたけどお蔵入りしたスライド。せっかく作ったので供養も兼ねてアップロード
Technology
◦
Read more
8
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 32
2
/ 32
3
/ 32
4
/ 32
5
/ 32
6
/ 32
7
/ 32
8
/ 32
9
/ 32
10
/ 32
11
/ 32
12
/ 32
13
/ 32
14
/ 32
15
/ 32
16
/ 32
17
/ 32
18
/ 32
19
/ 32
20
/ 32
21
/ 32
22
/ 32
23
/ 32
24
/ 32
25
/ 32
26
/ 32
27
/ 32
28
/ 32
29
/ 32
30
/ 32
31
/ 32
32
/ 32
More Related Content
PPTX
深層学習の数理:カーネル法, スパース推定との接点
by
Taiji Suzuki
PPTX
Deep Recurrent Q-Learning(DRQN) for Partially Observable MDPs
by
Hakky St
PDF
Transformerを多層にする際の勾配消失問題と解決法について
by
Sho Takase
PPTX
Group normalization
by
Ryutaro Yamauchi
PDF
リプシッツ連続性に基づく勾配法・ニュートン型手法の計算量解析
by
京都大学大学院情報学研究科数理工学専攻
PPTX
PRML第6章「カーネル法」
by
Keisuke Sugawara
PPTX
勾配降下法の 最適化アルゴリズム
by
nishio
PDF
Stochastic Gradient MCMC
by
Kenta Oono
深層学習の数理:カーネル法, スパース推定との接点
by
Taiji Suzuki
Deep Recurrent Q-Learning(DRQN) for Partially Observable MDPs
by
Hakky St
Transformerを多層にする際の勾配消失問題と解決法について
by
Sho Takase
Group normalization
by
Ryutaro Yamauchi
リプシッツ連続性に基づく勾配法・ニュートン型手法の計算量解析
by
京都大学大学院情報学研究科数理工学専攻
PRML第6章「カーネル法」
by
Keisuke Sugawara
勾配降下法の 最適化アルゴリズム
by
nishio
Stochastic Gradient MCMC
by
Kenta Oono
What's hot
PPTX
[DL輪読会]モデルベース強化学習とEnergy Based Model
by
Deep Learning JP
PDF
HiPPO/S4解説
by
Morpho, Inc.
PPTX
報酬設計と逆強化学習
by
Yusuke Nakata
PPTX
[DL輪読会] “Asymmetric Tri-training for Unsupervised Domain Adaptation (ICML2017...
by
Yusuke Iwasawa
PDF
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係)
by
Teppei Kurita
PDF
多倍長整数の乗算と高速フーリエ変換
by
京大 マイコンクラブ
PDF
[DL輪読会]Hindsight Experience Replay
by
Deep Learning JP
PDF
双対性
by
Yoichi Iwata
PDF
第126回 ロボット工学セミナー 三次元点群と深層学習
by
Naoya Chiba
PDF
決定森回帰の信頼区間推定, Benign Overfitting, 多変量木とReLUネットの入力空間分割
by
Ichigaku Takigawa
PDF
連続最適化勉強会
by
shima o
PPT
lsh
by
Shunsuke Aihara
PDF
20190721 gaussian process
by
Yoichi Tokita
PDF
ブースティング入門
by
Retrieva inc.
PDF
計算論的学習理論入門 -PAC学習とかVC次元とか-
by
sleepy_yoshi
PDF
Active Learning 入門
by
Shuyo Nakatani
PPTX
[DL輪読会]Learning Latent Dynamics for Planning from Pixels
by
Deep Learning JP
PPTX
[DL輪読会]相互情報量最大化による表現学習
by
Deep Learning JP
PDF
Divisor
by
oupc
PDF
方策勾配型強化学習の基礎と応用
by
Ryo Iwaki
[DL輪読会]モデルベース強化学習とEnergy Based Model
by
Deep Learning JP
HiPPO/S4解説
by
Morpho, Inc.
報酬設計と逆強化学習
by
Yusuke Nakata
[DL輪読会] “Asymmetric Tri-training for Unsupervised Domain Adaptation (ICML2017...
by
Yusuke Iwasawa
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係)
by
Teppei Kurita
多倍長整数の乗算と高速フーリエ変換
by
京大 マイコンクラブ
[DL輪読会]Hindsight Experience Replay
by
Deep Learning JP
双対性
by
Yoichi Iwata
第126回 ロボット工学セミナー 三次元点群と深層学習
by
Naoya Chiba
決定森回帰の信頼区間推定, Benign Overfitting, 多変量木とReLUネットの入力空間分割
by
Ichigaku Takigawa
連続最適化勉強会
by
shima o
lsh
by
Shunsuke Aihara
20190721 gaussian process
by
Yoichi Tokita
ブースティング入門
by
Retrieva inc.
計算論的学習理論入門 -PAC学習とかVC次元とか-
by
sleepy_yoshi
Active Learning 入門
by
Shuyo Nakatani
[DL輪読会]Learning Latent Dynamics for Planning from Pixels
by
Deep Learning JP
[DL輪読会]相互情報量最大化による表現学習
by
Deep Learning JP
Divisor
by
oupc
方策勾配型強化学習の基礎と応用
by
Ryo Iwaki
Viewers also liked
PPTX
猫でも分かるVariational AutoEncoder
by
Sho Tatsuno
PDF
IIBMP2016 深層生成モデルによる表現学習
by
Preferred Networks
PDF
明日使えないすごいビット演算
by
京大 マイコンクラブ
PDF
GPUが100倍速いという神話をぶち殺せたらいいな ver.2013
by
Ryo Sakamoto
PDF
Overview of tree algorithms from decision tree to xgboost
by
Takami Sato
PDF
High performance python computing for data science
by
Takami Sato
PDF
Scikit learnで学ぶ機械学習入門
by
Takami Sato
PDF
Xgboost
by
Vivian S. Zhang
PDF
AAをつくろう!
by
Takami Sato
PDF
Kaggle Winning Solution Xgboost algorithm -- Let us learn from its author
by
Vivian S. Zhang
PDF
Quoraコンペ参加記録
by
Takami Sato
PDF
Icml2015 論文紹介 sparse_subspace_clustering_with_missing_entries
by
Takami Sato
PDF
Data Science Bowl 2017 Winning Solutions Survey
by
Takami Sato
PPT
30分で博士号がとれる画像処理講座
by
Sakiyama Kei
PDF
Word2vecで大谷翔平の二刀流論争に終止符を打つ!
by
Takami Sato
猫でも分かるVariational AutoEncoder
by
Sho Tatsuno
IIBMP2016 深層生成モデルによる表現学習
by
Preferred Networks
明日使えないすごいビット演算
by
京大 マイコンクラブ
GPUが100倍速いという神話をぶち殺せたらいいな ver.2013
by
Ryo Sakamoto
Overview of tree algorithms from decision tree to xgboost
by
Takami Sato
High performance python computing for data science
by
Takami Sato
Scikit learnで学ぶ機械学習入門
by
Takami Sato
Xgboost
by
Vivian S. Zhang
AAをつくろう!
by
Takami Sato
Kaggle Winning Solution Xgboost algorithm -- Let us learn from its author
by
Vivian S. Zhang
Quoraコンペ参加記録
by
Takami Sato
Icml2015 論文紹介 sparse_subspace_clustering_with_missing_entries
by
Takami Sato
Data Science Bowl 2017 Winning Solutions Survey
by
Takami Sato
30分で博士号がとれる画像処理講座
by
Sakiyama Kei
Word2vecで大谷翔平の二刀流論争に終止符を打つ!
by
Takami Sato
Similar to NIPS2016論文紹介 Riemannian SVRG fast stochastic optimization on riemannian manifolds
PPTX
多目的強凸最適化のパレート集合のトポロジー
by
KLab Inc. / Tech
PDF
(文献紹介) 画像復元:Plug-and-Play ADMM
by
Morpho, Inc.
PDF
SGD+α: 確率的勾配降下法の現在と未来
by
Hidekazu Oiwa
PDF
大規模凸最適化問題に対する勾配法
by
京都大学大学院情報学研究科数理工学専攻
PDF
Hyperoptとその周辺について
by
Keisuke Hosaka
PDF
信号処理・画像処理における凸最適化
by
Shunsuke Ono
PDF
LightGBM: a highly efficient gradient boosting decision tree
by
Yusuke Kaneko
PDF
MIRU2016 チュートリアル
by
Shunsuke Ono
PDF
Kensuke Aihara
by
Suurist
PPTX
Prml revenge7.1.1
by
Naoya Nakamura
PDF
Yasunori Futamura
by
Suurist
PPTX
離散数理分野(研究室)の案内
by
京都大学大学院情報学研究科数理工学専攻
PDF
Nips yomikai 1226
by
Yo Ehara
PDF
第9回 配信講義 計算科学技術特論A(2021)
by
RCCSRENKEI
PDF
Infomation geometry(overview)
by
Yoshitake Misaki
PDF
第2回プログラマのための数学LT会
by
春 根上
PDF
CMSI計算科学技術特論A (2015) 第11回 行列計算における高速アルゴリズム2
by
Computational Materials Science Initiative
PDF
El text.tokuron a(2019).yamamoto190627
by
RCCSRENKEI
PDF
Icml yomikai 07_16
by
Yo Ehara
PDF
20200704 bsp net
by
Takuya Minagawa
多目的強凸最適化のパレート集合のトポロジー
by
KLab Inc. / Tech
(文献紹介) 画像復元:Plug-and-Play ADMM
by
Morpho, Inc.
SGD+α: 確率的勾配降下法の現在と未来
by
Hidekazu Oiwa
大規模凸最適化問題に対する勾配法
by
京都大学大学院情報学研究科数理工学専攻
Hyperoptとその周辺について
by
Keisuke Hosaka
信号処理・画像処理における凸最適化
by
Shunsuke Ono
LightGBM: a highly efficient gradient boosting decision tree
by
Yusuke Kaneko
MIRU2016 チュートリアル
by
Shunsuke Ono
Kensuke Aihara
by
Suurist
Prml revenge7.1.1
by
Naoya Nakamura
Yasunori Futamura
by
Suurist
離散数理分野(研究室)の案内
by
京都大学大学院情報学研究科数理工学専攻
Nips yomikai 1226
by
Yo Ehara
第9回 配信講義 計算科学技術特論A(2021)
by
RCCSRENKEI
Infomation geometry(overview)
by
Yoshitake Misaki
第2回プログラマのための数学LT会
by
春 根上
CMSI計算科学技術特論A (2015) 第11回 行列計算における高速アルゴリズム2
by
Computational Materials Science Initiative
El text.tokuron a(2019).yamamoto190627
by
RCCSRENKEI
Icml yomikai 07_16
by
Yo Ehara
20200704 bsp net
by
Takuya Minagawa
Recently uploaded
PDF
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
by
TomohiroKusu
PDF
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
by
たけおか しょうぞう
PDF
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
by
Sugiyama Yugo
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
by
PC Cluster Consortium
PDF
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
by
NTT DATA Technology & Innovation
PPTX
DrupalCon Nara 2025の記録 .
by
iPride Co., Ltd.
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
by
TomohiroKusu
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
by
たけおか しょうぞう
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
by
Sugiyama Yugo
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
by
PC Cluster Consortium
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
by
NTT DATA Technology & Innovation
DrupalCon Nara 2025の記録 .
by
iPride Co., Ltd.
NIPS2016論文紹介 Riemannian SVRG fast stochastic optimization on riemannian manifolds
1.
NIPS 2016論文紹介 Riemannian SVRG:
Fast Stochastic Optimization on Riemannian Manifolds Takami Sato 2017/02/03NIPS2016論文紹介 1 Authors: Hongyi Zhang, Sashank J. Reddi and Suvrit Sra
2.
論文諭旨 • SVRGをリーマン多様体上の最適化に拡張(RSVRG) • 測地的凸関数の場合で、線形収束することを証明 –
先行研究はGDの線形収束、SGDの劣線形収束 • 測地的非凸関数場合で、局所解に劣線形収束することを証明 – 先行研究は𝑂(1/𝜖2)だが本論文は𝑂(1/𝜖) • 勾配のノルムの上界が定数で抑えられる(Gradient Dominated)場合、 非凸でも大域的最適解に線形収束することを証明 • 主固有ベクトルを求める問題がGradient Dominatedな、 リーマン多様体上の最適化になることを証明 • PCAとRiemman centroidを求める問題に対して、 数値実験でRSVRGの優位性を検証 2017/02/03NIPS2016論文紹介 2
3.
リーマン多様体上での最適化 基本的にこの資料を参考にしました 2017/02/03NIPS2016論文紹介 3 http://www.slideshare.net/Suurist/hiroyuki-sato-62489428 議事録もある http://suuri.st/portfolio/%E4%BD%90%E8%97%A4%E5%AF%9B%E4%B9%8B
4.
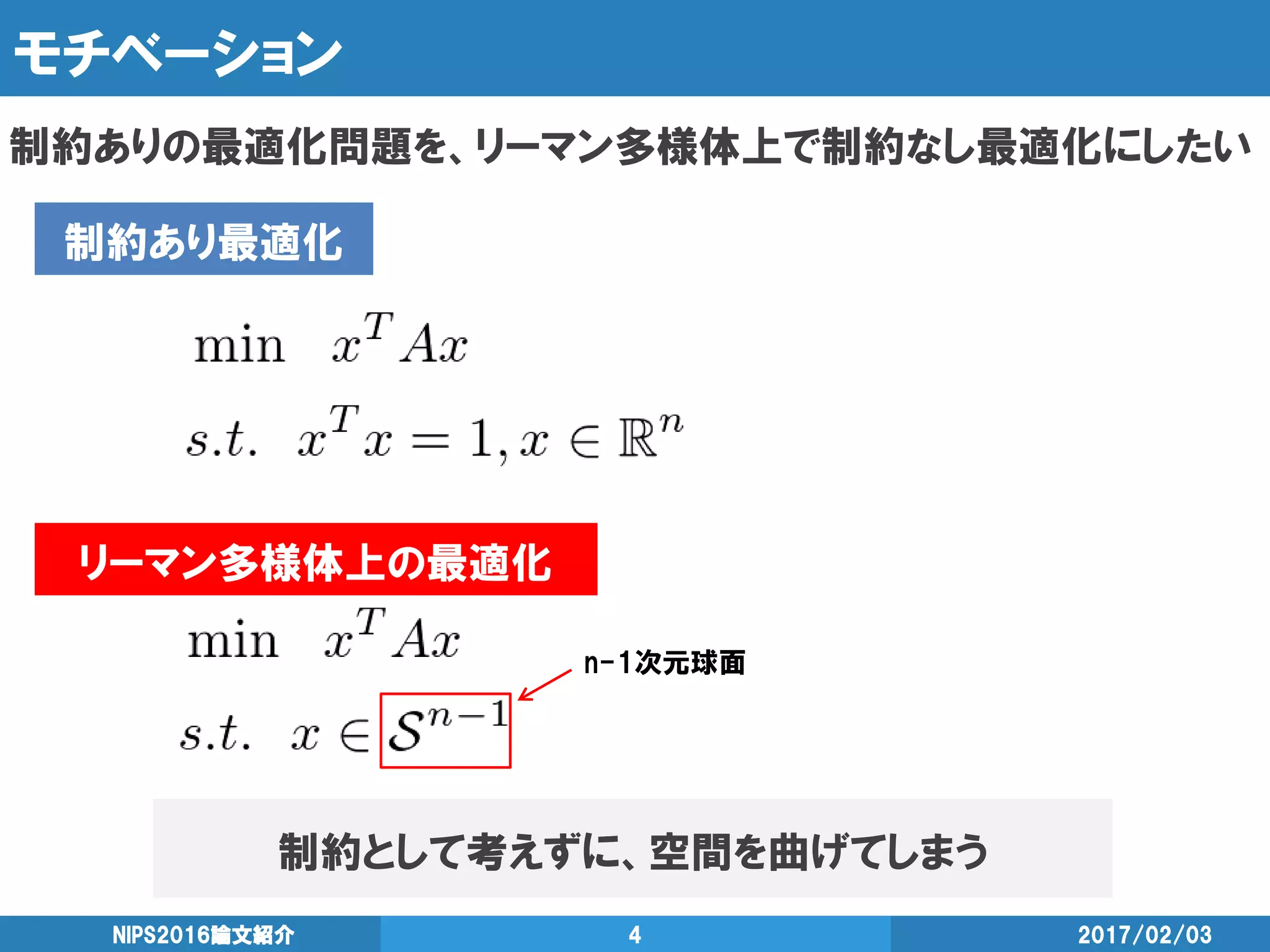
モチベーション 制約ありの最適化問題を、リーマン多様体上で制約なし最適化にしたい 2017/02/03NIPS2016論文紹介 4 制約あり最適化 リーマン多様体上の最適化 制約として考えずに、空間を曲げてしまう n-1次元球面
5.
リーマン多様体とは 2017/02/03NIPS2016論文紹介 5 リーマン多様体 (Riemannian
manifold) 可微分多様体Mが、M上の各点における接空間に内積が与えられている場合 多様体 • 局所的にユークリッド空間とみなせる※空間 • 遠くはわからんが、生活する分には不自由ない空間的な雰囲気 • 昔の人は、平面上に住んでると思っていたがとくに不自由はなし 可微分 • なめらか • 局所的なユークリッド空間を滑らかになるように繋ぎ合わせた ※ユークリッド空間と同相
6.
リーマン多様体とは 2017/02/03NIPS2016論文紹介 6 リーマン多様体 (Riemannian
manifold) 可微分多様体Mが、M上の各点における接空間に内積が与えられている場合 接空間(tangent space)に内積 • 多様体で“ちゃんとした”距離を定義したい • 接空間(各点の方向微分が貼る空間を集めた空間)が内積空間だ(計量が入ってる)と良い ユークリッド空間 上の滑らかな曲線𝑐の長さは以下 (始点を0、終点を1で表した曲線) 微分の長さが定義が必要 → 接空間で内積が定義
7.
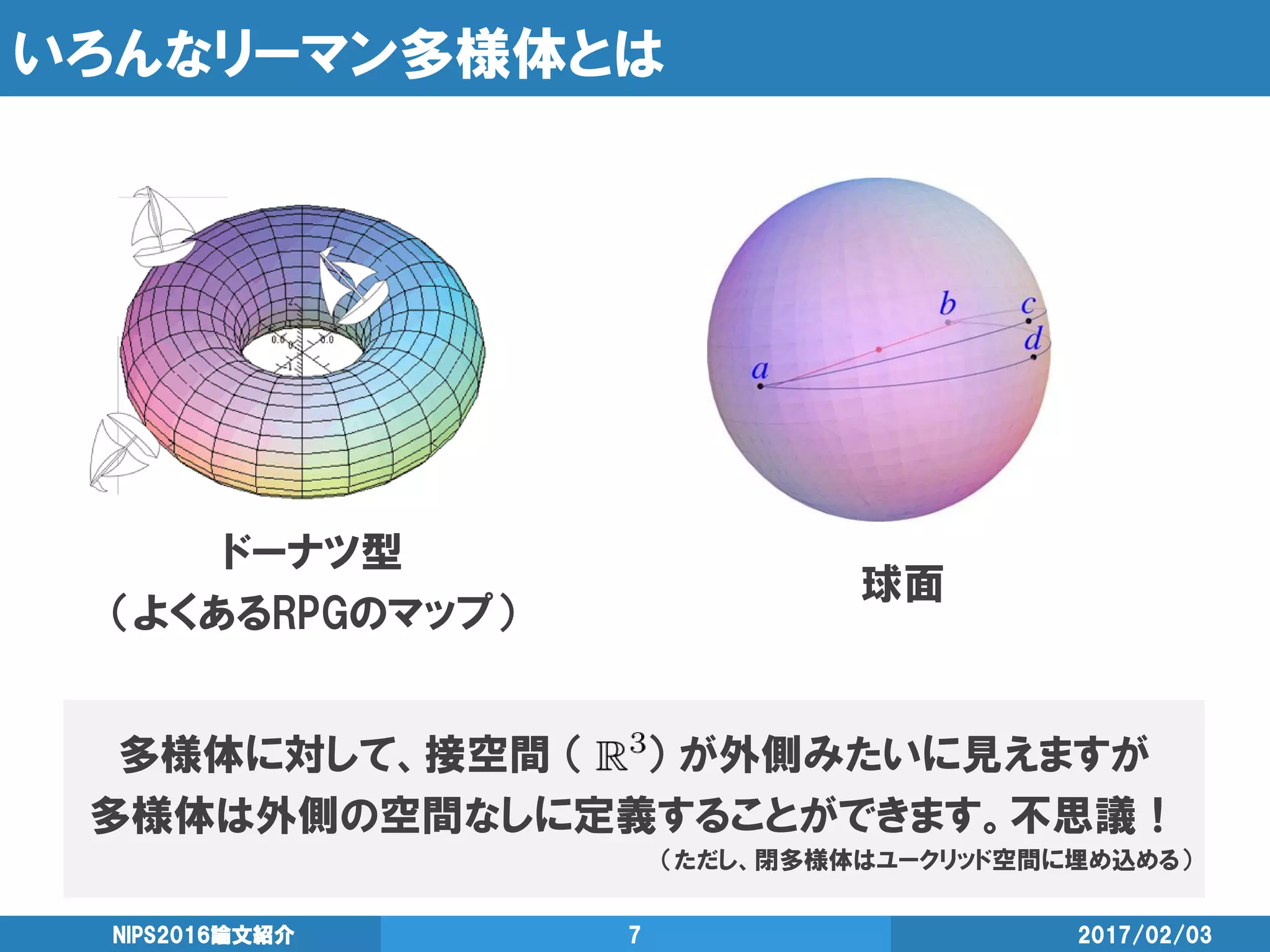
いろんなリーマン多様体とは 2017/02/03NIPS2016論文紹介 7 ドーナツ型 (よくあるRPGのマップ) 多様体に対して、接空間 (
) が外側みたいに見えますが 多様体は外側の空間なしに定義することができます。不思議! (ただし、閉多様体はユークリッド空間に埋め込める) 球面
8.
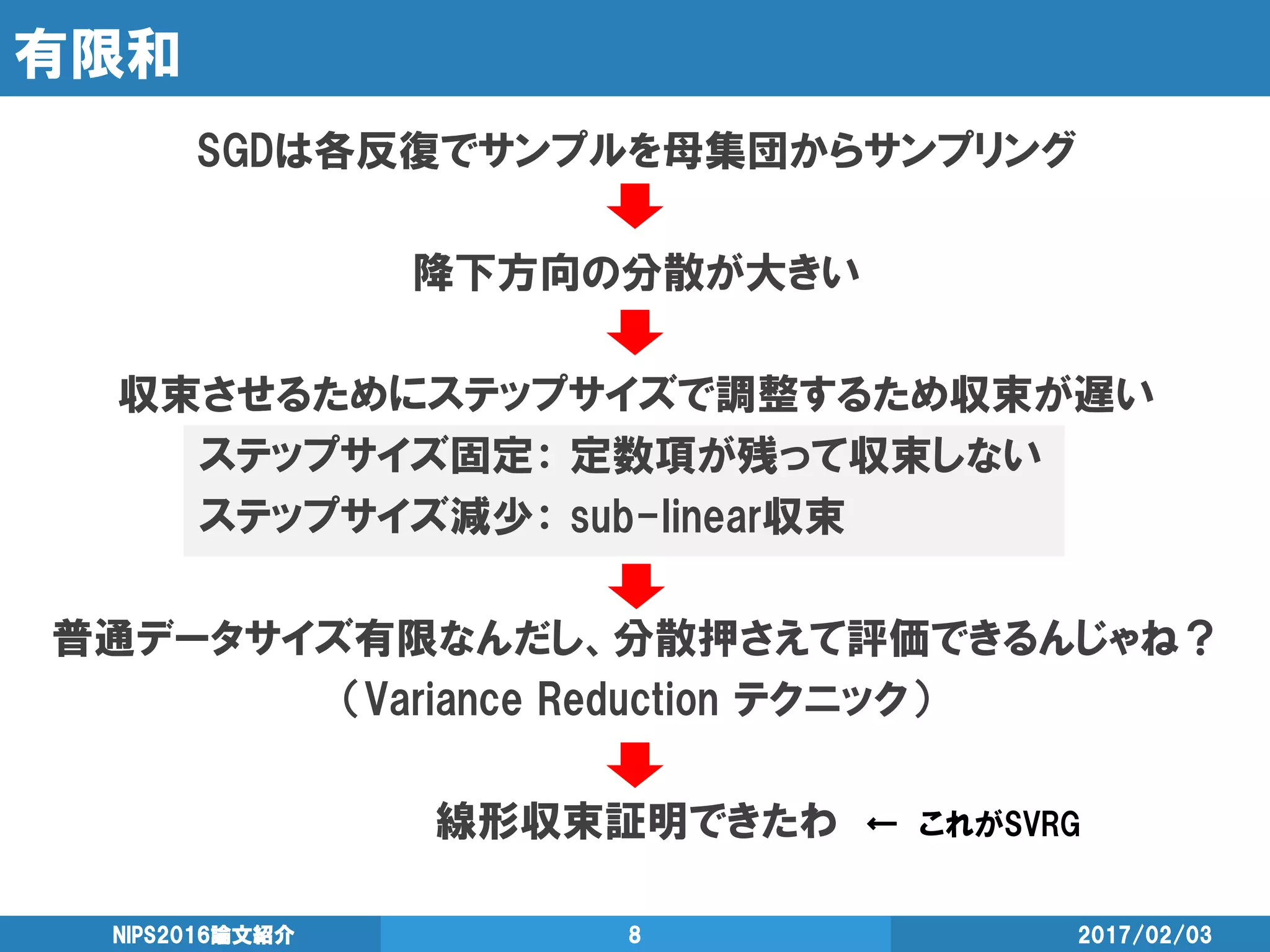
有限和 SGDは各反復でサンプルを母集団からサンプリング 降下方向の分散が大きい 収束させるためにステップサイズで調整するため収束が遅い ステップサイズ固定: 定数項が残って収束しない ステップサイズ減少: sub-linear収束 普通データサイズ有限なんだし、分散押さえて評価できるんじゃね? (Variance
Reduction テクニック) 線形収束証明できたわ 2017/02/03NIPS2016論文紹介 8 ← これがSVRG
9.
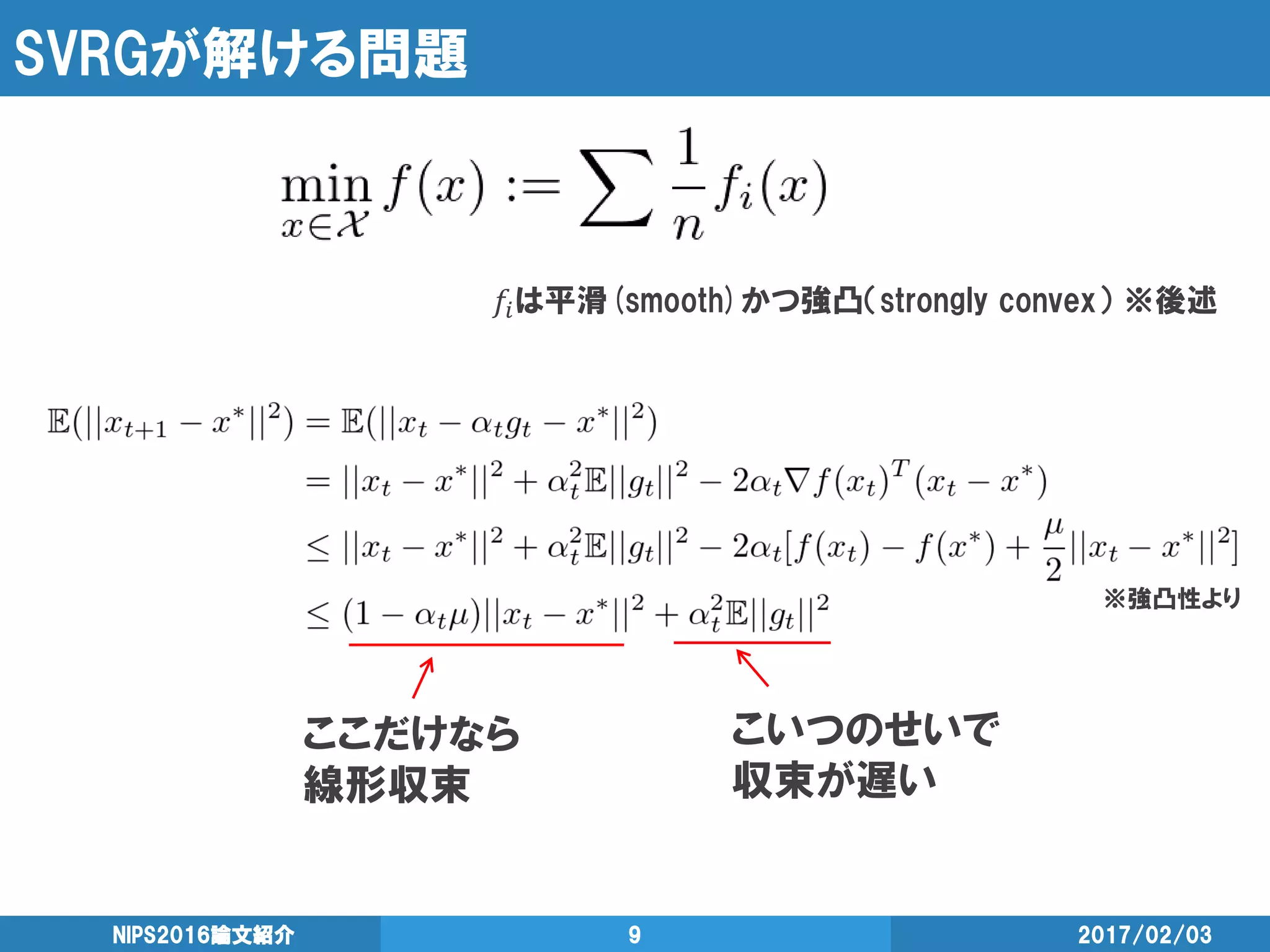
SVRGが解ける問題 2017/02/03NIPS2016論文紹介 9 𝑓𝑖は平滑(smooth)かつ強凸(strongly convex)
※後述 ※強凸性より ここだけなら 線形収束 こいつのせいで 収束が遅い
10.
SVRGとは 正確には、 2017/02/03NIPS2016論文紹介 10 SAG 『線形収束したぞ』 SVRG
『降下方向が、 勾配の普遍推定量になるようにしたぞ』 SAGA 『SAGとSVRGの中間的なの作ったぞ』
11.
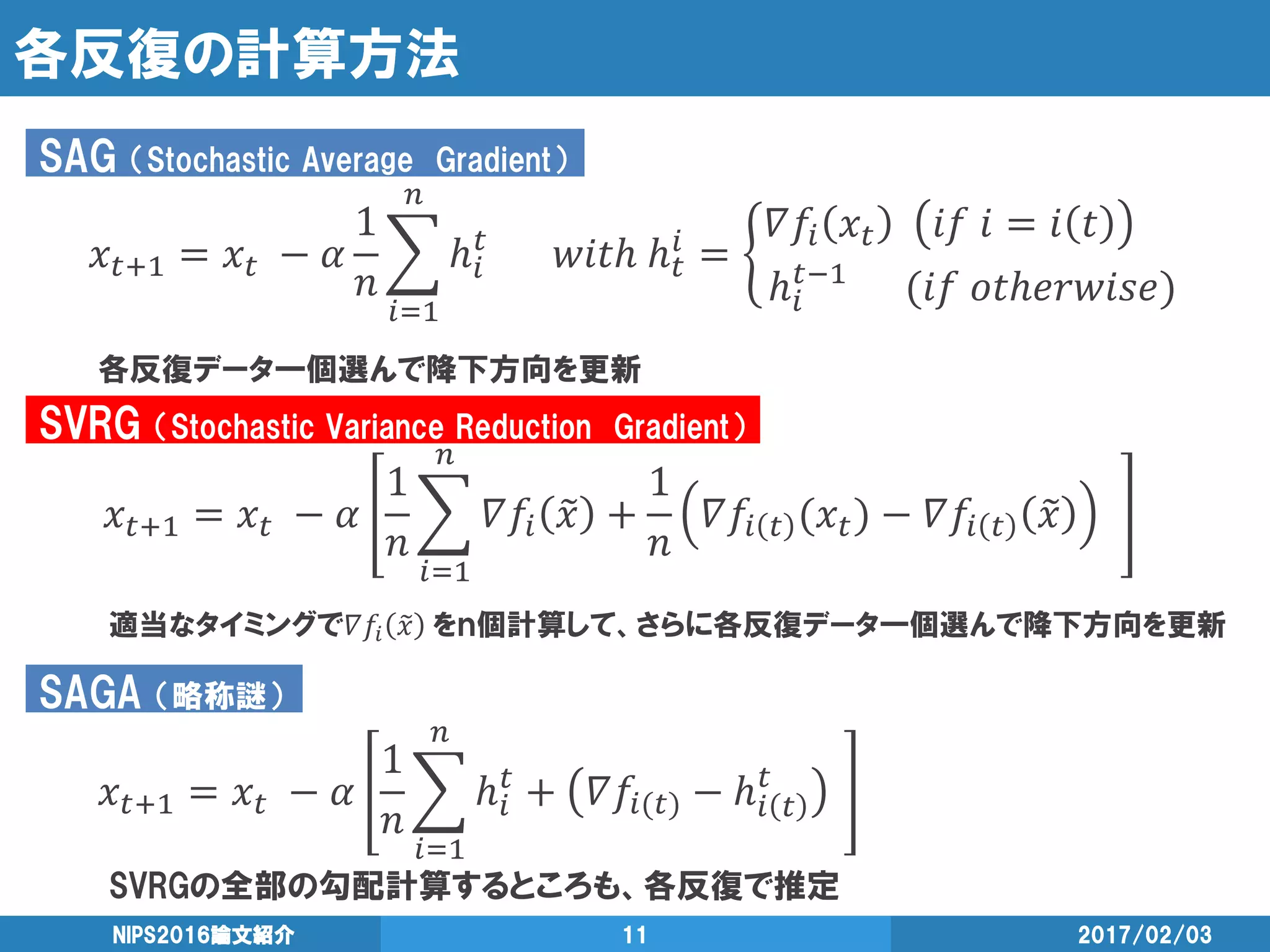
各反復の計算方法 𝑥𝑡+1 = 𝑥𝑡
− 𝛼 1 𝑛 ℎ𝑖 𝑡 𝑛 𝑖=1 𝑤𝑖𝑡ℎ ℎ 𝑡 𝑖 = 𝛻𝑓𝑖 𝑥𝑡 𝑖𝑓 𝑖 = 𝑖 𝑡 ℎ𝑖 𝑡−1 (𝑖𝑓 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒) 2017/02/03NIPS2016論文紹介 11 𝑥𝑡+1 = 𝑥𝑡 − 𝛼 1 𝑛 𝛻𝑓𝑖 𝑥 𝑛 𝑖=1 + 1 𝑛 𝛻𝑓𝑖 𝑡 (𝑥𝑡) − 𝛻𝑓𝑖 𝑡 𝑥 𝑥𝑡+1 = 𝑥𝑡 − 𝛼 1 𝑛 ℎ𝑖 𝑡 𝑛 𝑖=1 + 𝛻𝑓𝑖(𝑡) − ℎ𝑖 𝑡 𝑡 SAG (Stochastic Average Gradient) SVRG (Stochastic Variance Reduction Gradient) SAGA (略称謎) 各反復データ一個選んで降下方向を更新 適当なタイミングで𝛻𝑓𝑖 𝑥 をn個計算して、さらに各反復データ一個選んで降下方向を更新 SVRGの全部の勾配計算するところも、各反復で推定
12.
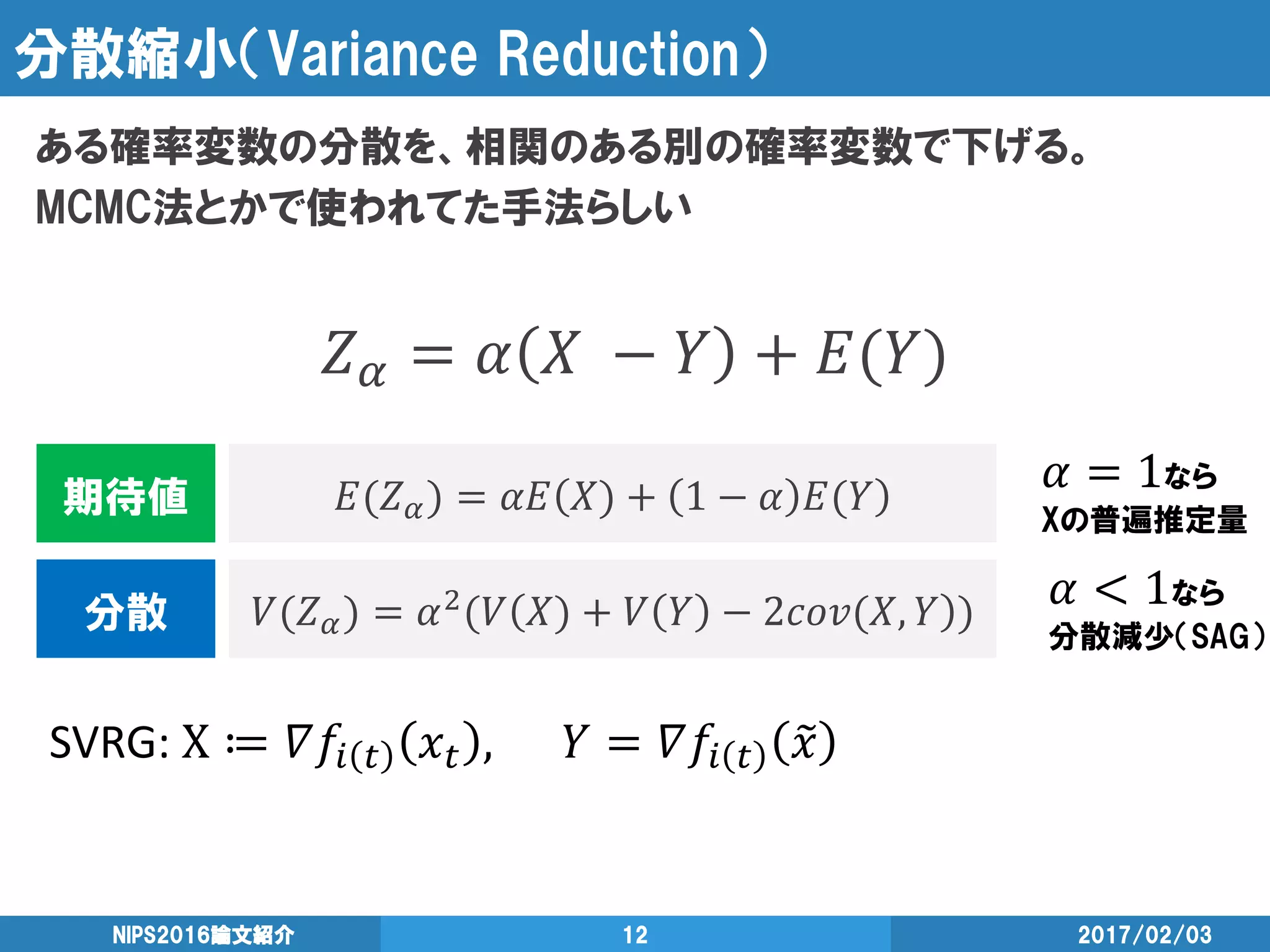
分散縮小(Variance Reduction) ある確率変数の分散を、相関のある別の確率変数で下げる。 MCMC法とかで使われてた手法らしい 2017/02/03NIPS2016論文紹介 12 𝑍
𝛼 = 𝛼 𝑋 − 𝑌 + 𝐸(𝑌) 𝐸(𝑍 𝛼) = 𝛼𝐸 𝑋) + 1 − 𝛼 𝐸(𝑌期待値 𝛼 = 1なら Xの普遍推定量 𝑉(𝑍 𝛼) = 𝛼2(𝑉 𝑋) + 𝑉 𝑌 − 2𝑐𝑜𝑣(𝑋, 𝑌 )分散 𝛼 < 1なら 分散減少(SAG) SVRG: X ≔ 𝛻𝑓𝑖 𝑡 𝑥 𝑡 , 𝑌 = 𝛻𝑓𝑖 𝑡 𝑥
13.
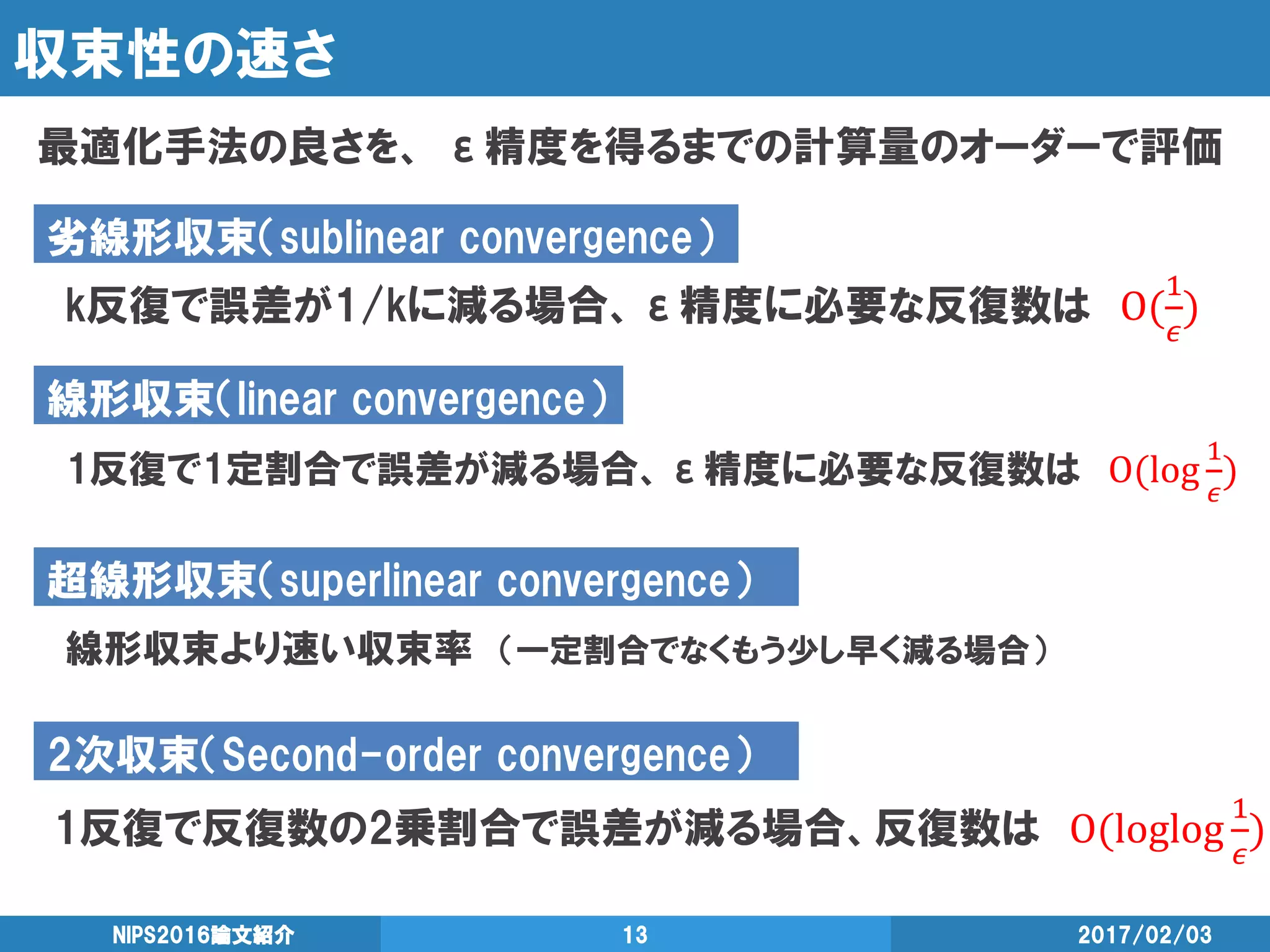
収束性の速さ 最適化手法の良さを、 ε精度を得るまでの計算量のオーダーで評価 2017/02/03NIPS2016論文紹介 13 劣線形収束(sublinear
convergence) 1反復で1定割合で誤差が減る場合、ε精度に必要な反復数は O(log 1 𝜖 ) 線形収束(linear convergence) k反復で誤差が1/kに減る場合、ε精度に必要な反復数は O( 1 𝜖 ) 超線形収束(superlinear convergence) 線形収束より速い収束率 (一定割合でなくもう少し早く減る場合) 2次収束(Second-order convergence) 1反復で反復数の2乗割合で誤差が減る場合、反復数は O(loglog 1 𝜖 )
14.
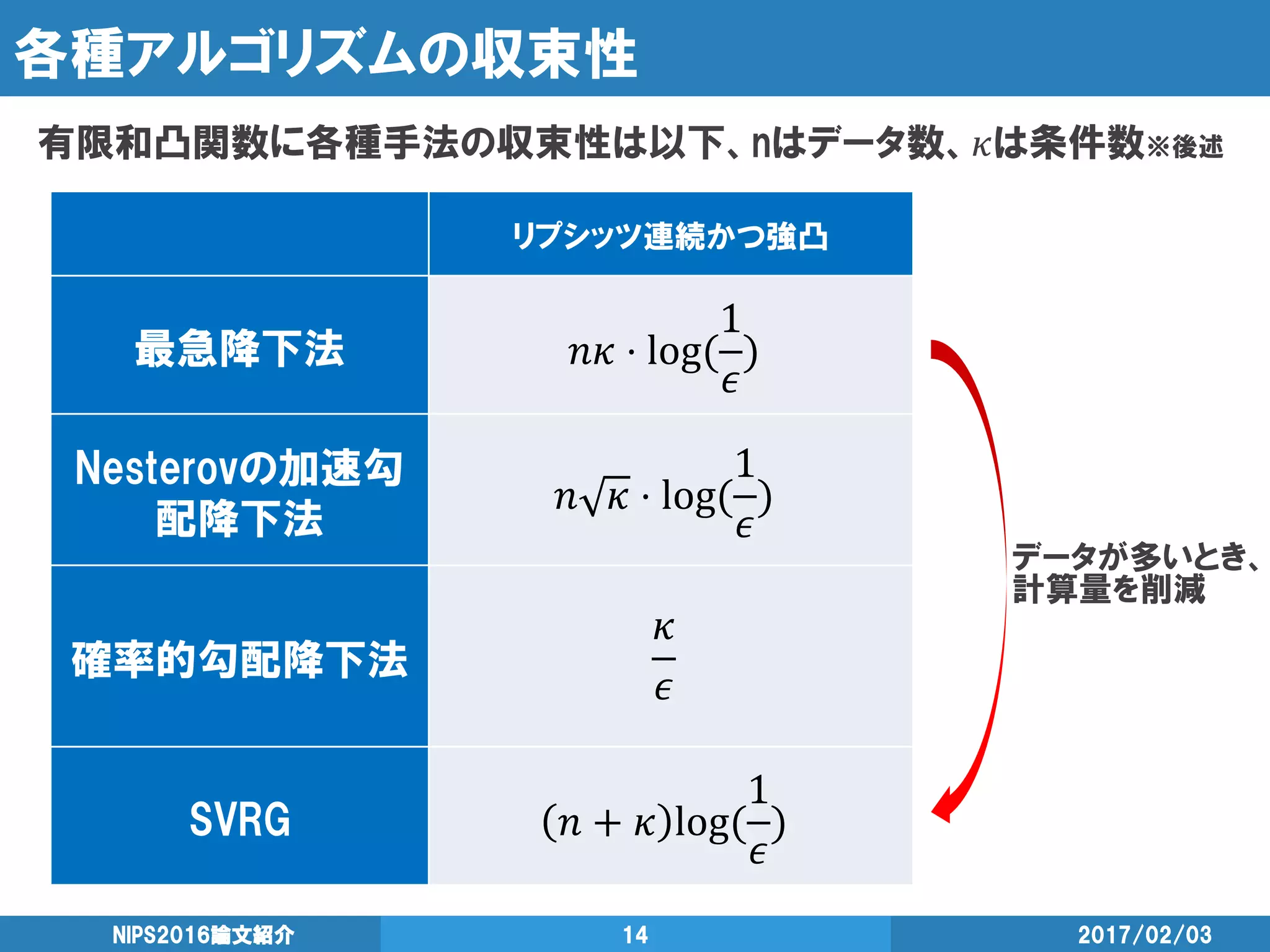
各種アルゴリズムの収束性 有限和凸関数に各種手法の収束性は以下、nはデータ数、𝜅は条件数※後述 2017/02/03NIPS2016論文紹介 14 リプシッツ連続かつ強凸 最急降下法 𝑛𝜅
⋅ log( 1 𝜖 ) Nesterovの加速勾 配降下法 𝑛 𝜅 ⋅ log( 1 𝜖 ) 確率的勾配降下法 𝜅 𝜖 SVRG 𝑛 + 𝜅 log( 1 𝜖 ) データが多いとき、 計算量を削減
15.
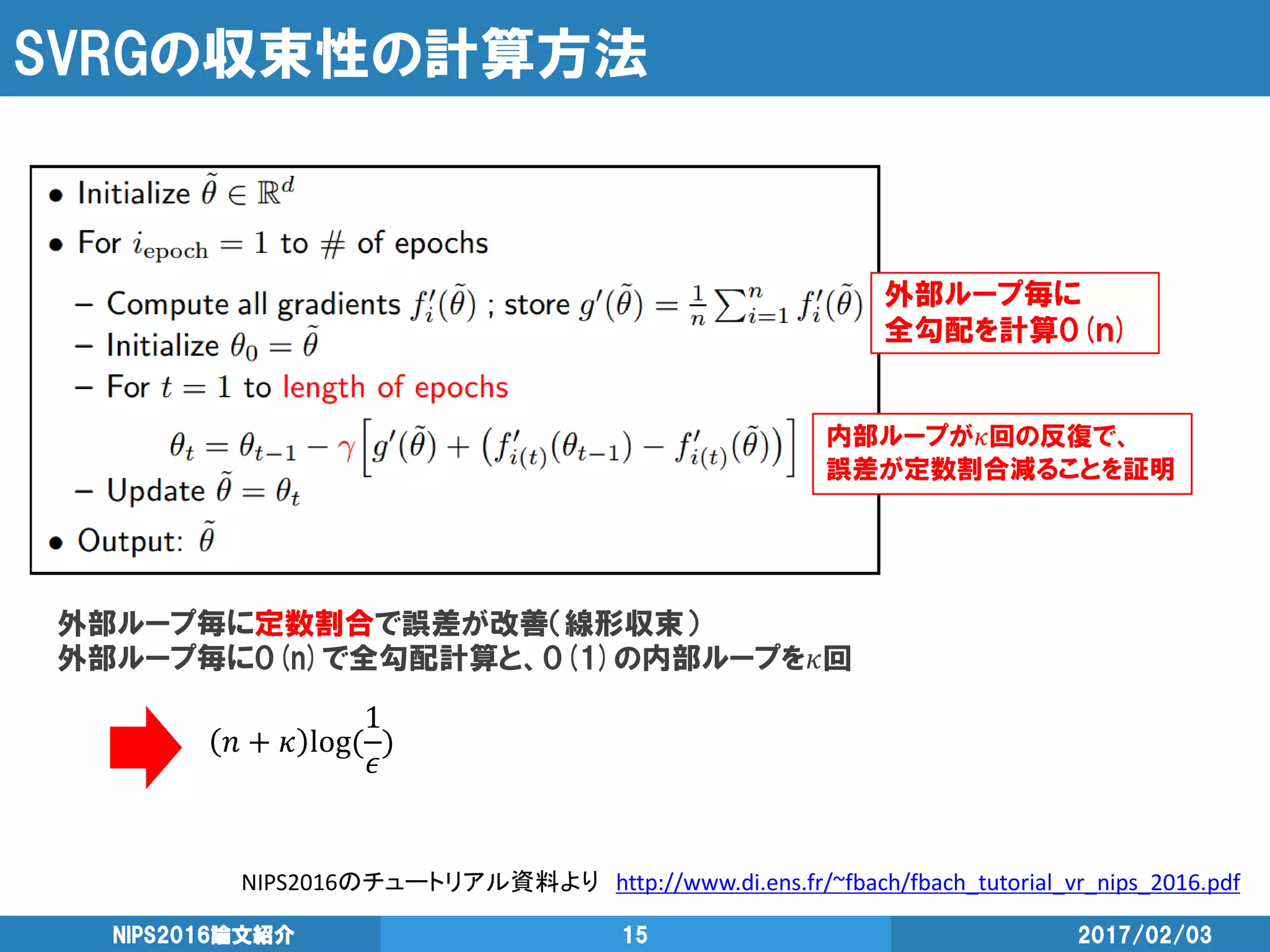
SVRGの収束性の計算方法 2017/02/03NIPS2016論文紹介 15 NIPS2016のチュートリアル資料より http://www.di.ens.fr/~fbach/fbach_tutorial_vr_nips_2016.pdf 内部ループが𝜅回の反復で、 誤差が定数割合減ることを証明 外部ループ毎に 全勾配を計算O(n) 外部ループ毎に定数割合で誤差が改善(線形収束) 外部ループ毎にO(n)で全勾配計算と、O(1)の内部ループを𝜅回 𝑛
+ 𝜅 log( 1 𝜖 )
16.
SVRGの威力 SVRG元論文[Johnson+ 2013]より 2017/02/03NIPS2016論文紹介 16
17.
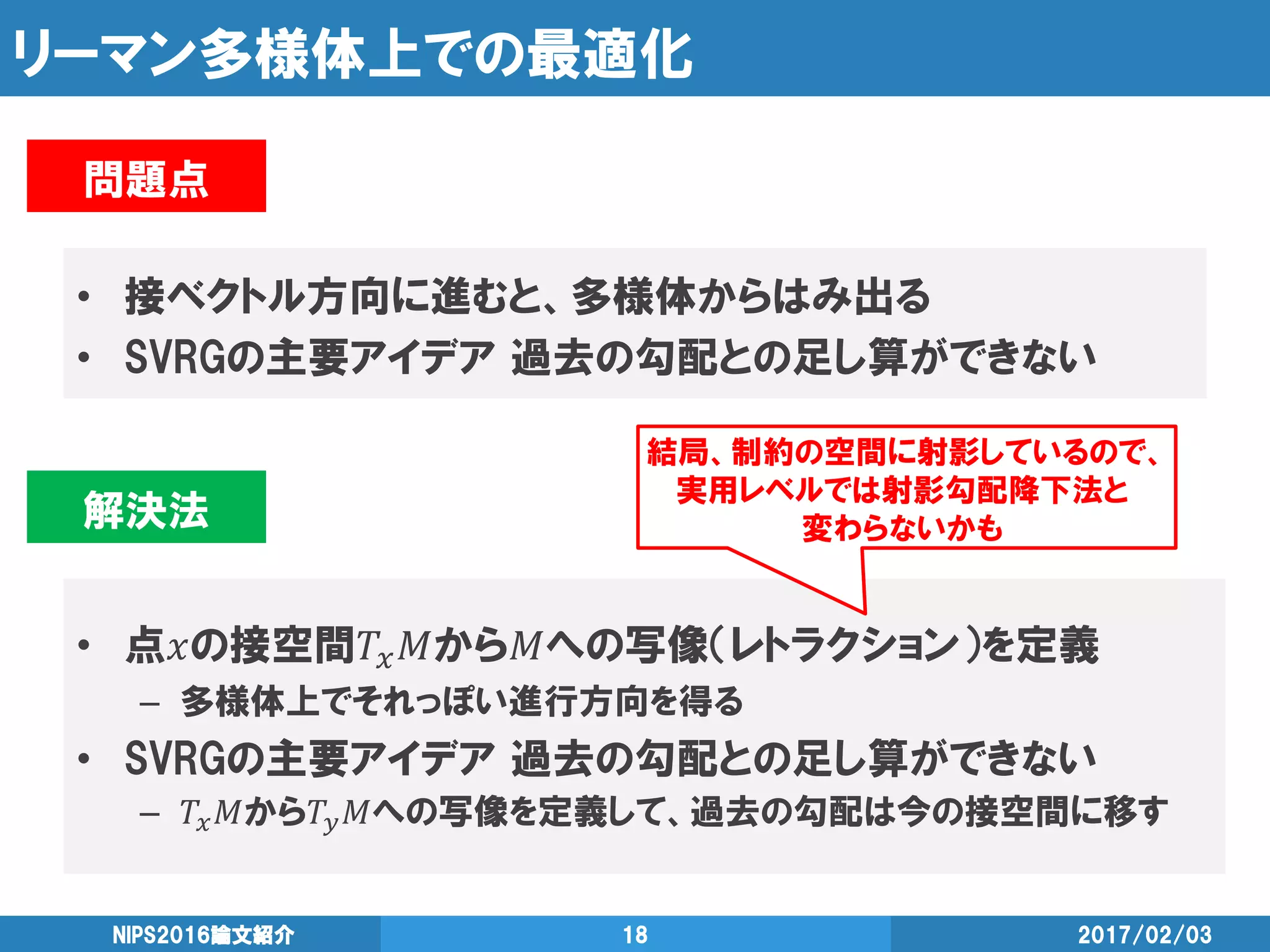
リーマン多様体上での最適化 • 接ベクトル方向に進むと、多様体からはみ出る • SVRGの主要アイデア
過去の勾配との足し算ができない 2017/02/03NIPS2016論文紹介 17 問題点 解決法 • 点𝑥の接空間𝑇𝑥 𝑀から𝑀への写像(レトラクション)を定義 – 多様体上でそれっぽい進行方向を得る • SVRGの主要アイデア 過去の勾配との足し算ができない – 𝑇𝑥 𝑀から𝑇𝑦 𝑀への写像を定義して、過去の勾配は今の接空間に移す
18.
リーマン多様体上での最適化 • 接ベクトル方向に進むと、多様体からはみ出る • SVRGの主要アイデア
過去の勾配との足し算ができない 2017/02/03NIPS2016論文紹介 18 問題点 解決法 • 点𝑥の接空間𝑇𝑥 𝑀から𝑀への写像(レトラクション)を定義 – 多様体上でそれっぽい進行方向を得る • SVRGの主要アイデア 過去の勾配との足し算ができない – 𝑇𝑥 𝑀から𝑇𝑦 𝑀への写像を定義して、過去の勾配は今の接空間に移す 結局、制約の空間に射影しているので、 実用レベルでは射影勾配降下法と 変わらないかも
19.
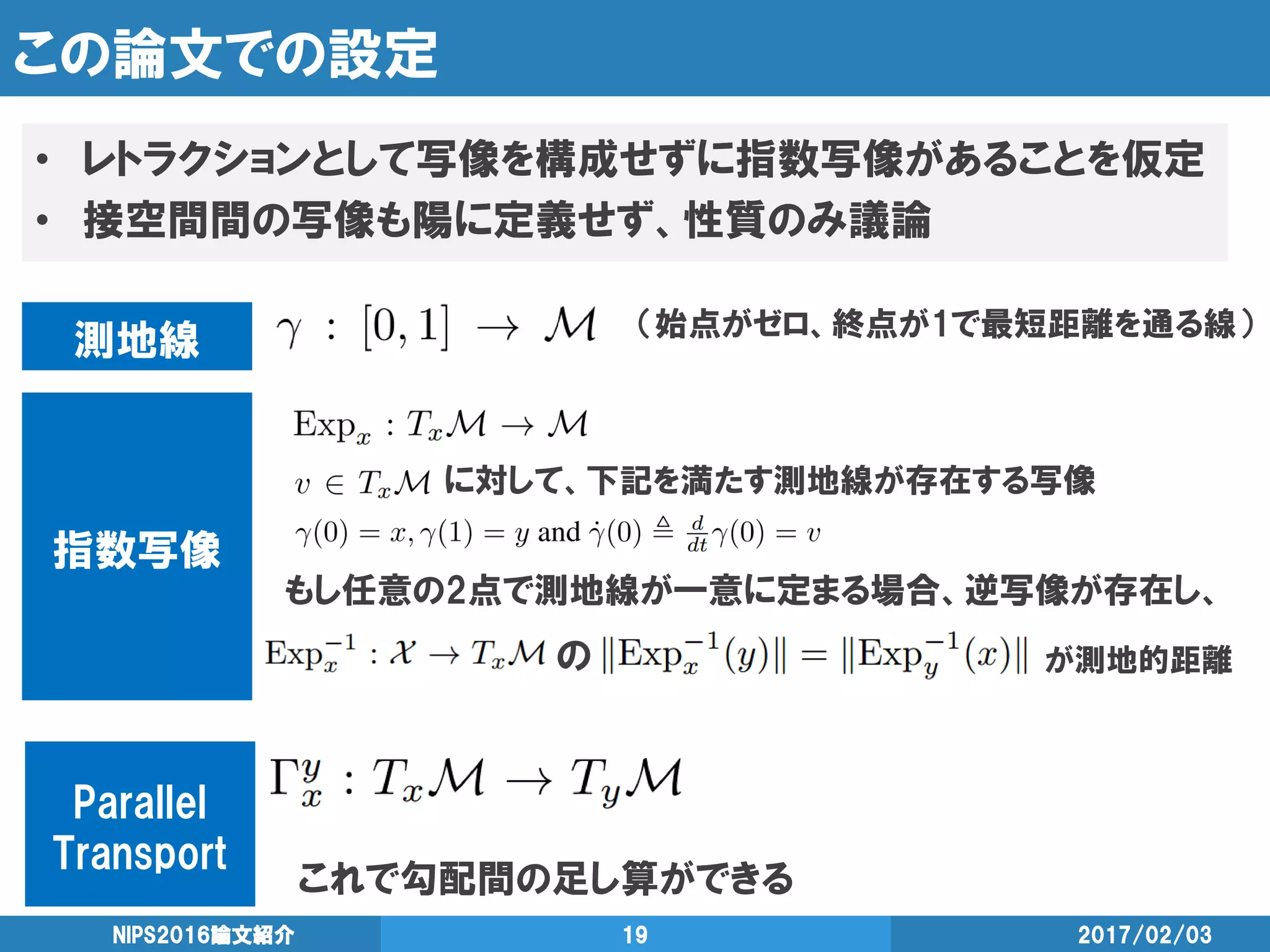
この論文での設定 • レトラクションとして写像を構成せずに指数写像があることを仮定 • 接空間間の写像も陽に定義せず、性質のみ議論 2017/02/03NIPS2016論文紹介
19 指数写像 測地線 (始点がゼロ、終点が1で最短距離を通る線) に対して、下記を満たす測地線が存在する写像 もし任意の2点で測地線が一意に定まる場合、逆写像が存在し、 の が測地的距離 Parallel Transport これで勾配間の足し算ができる
20.
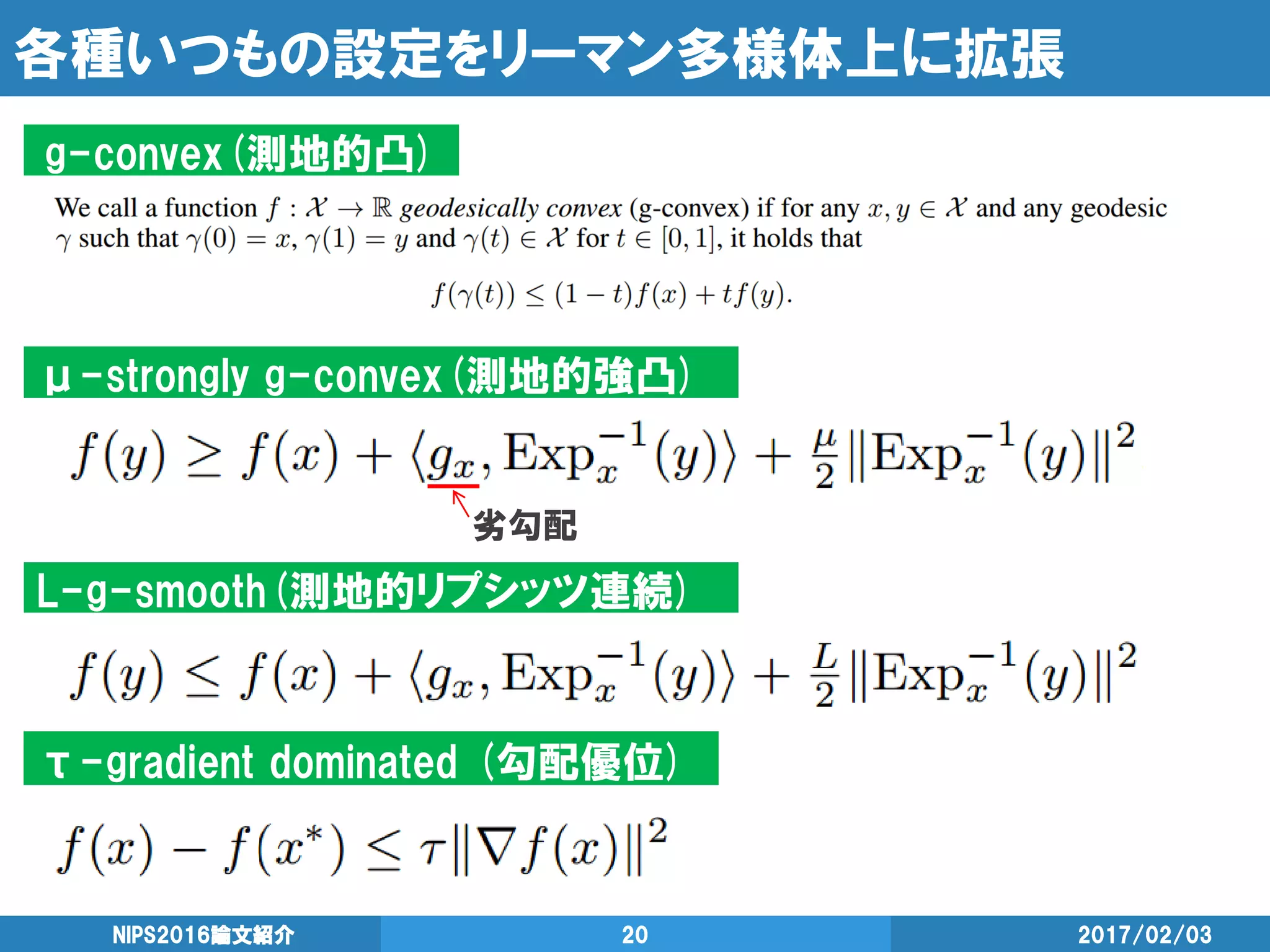
各種いつもの設定をリーマン多様体上に拡張 2017/02/03NIPS2016論文紹介 20 g-convex(測地的凸) μ-strongly g-convex(測地的強凸) L-g-smooth(測地的リプシッツ連続) 劣勾配 τ-gradient
dominated (勾配優位)
21.
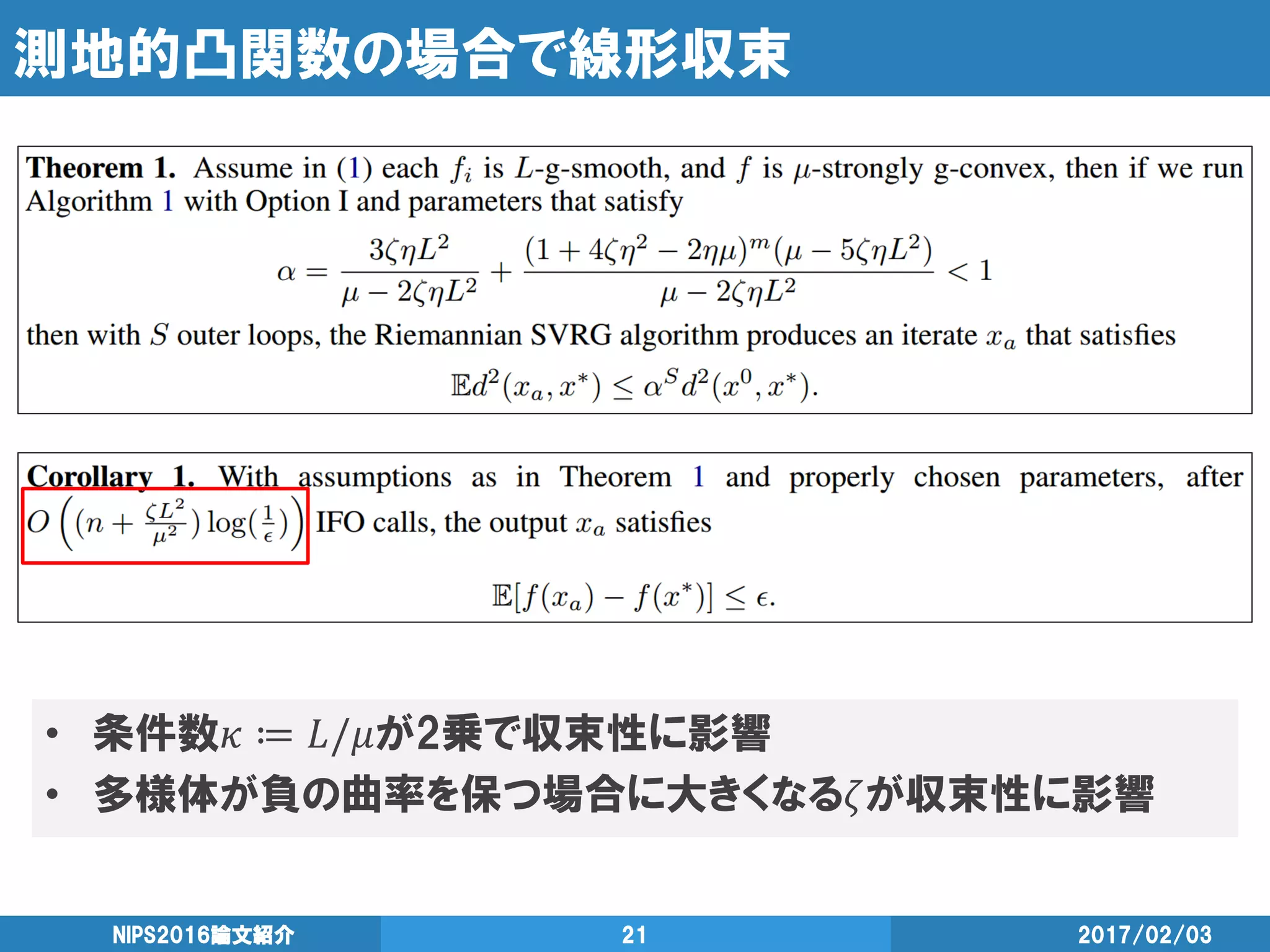
測地的凸関数の場合で線形収束 2017/02/03NIPS2016論文紹介 21 • 条件数𝜅
≔ 𝐿/𝜇が2乗で収束性に影響 • 多様体が負の曲率を保つ場合に大きくなる𝜁が収束性に影響
22.
証明の注意点 • 普通のSVRGの収束性解析では、 勾配の2乗を の項で押さえられたが、 RSVRGでは最適解との距離で抑えた •
(リプシッツ連続の性質があれば の補題になおせる) 2017/02/03NIPS2016論文紹介 22
23.
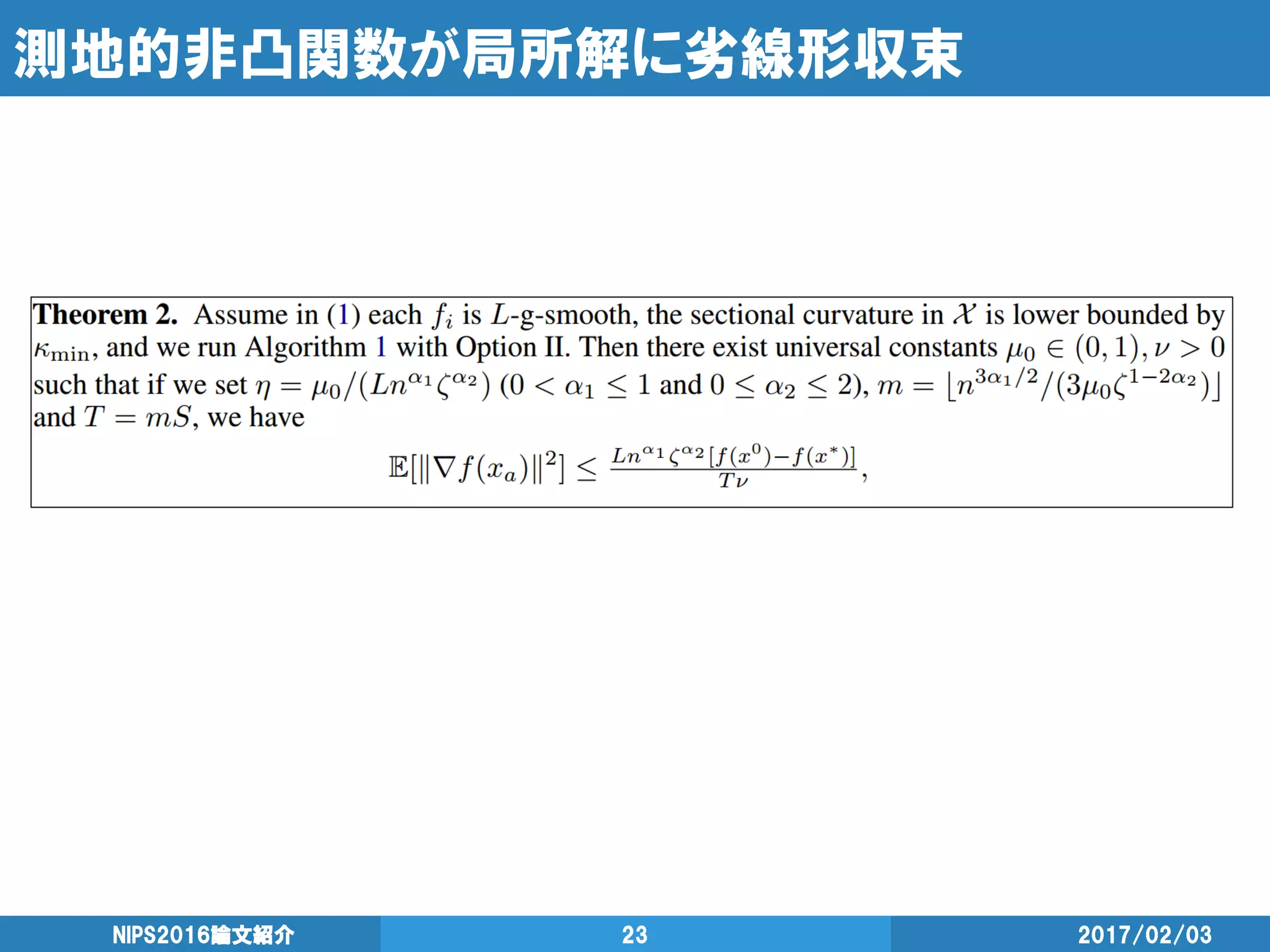
測地的非凸関数が局所解に劣線形収束 2017/02/03NIPS2016論文紹介 23
24.
証明は 絶賛勉強中 2017/02/03NIPS2016論文紹介 24
25.
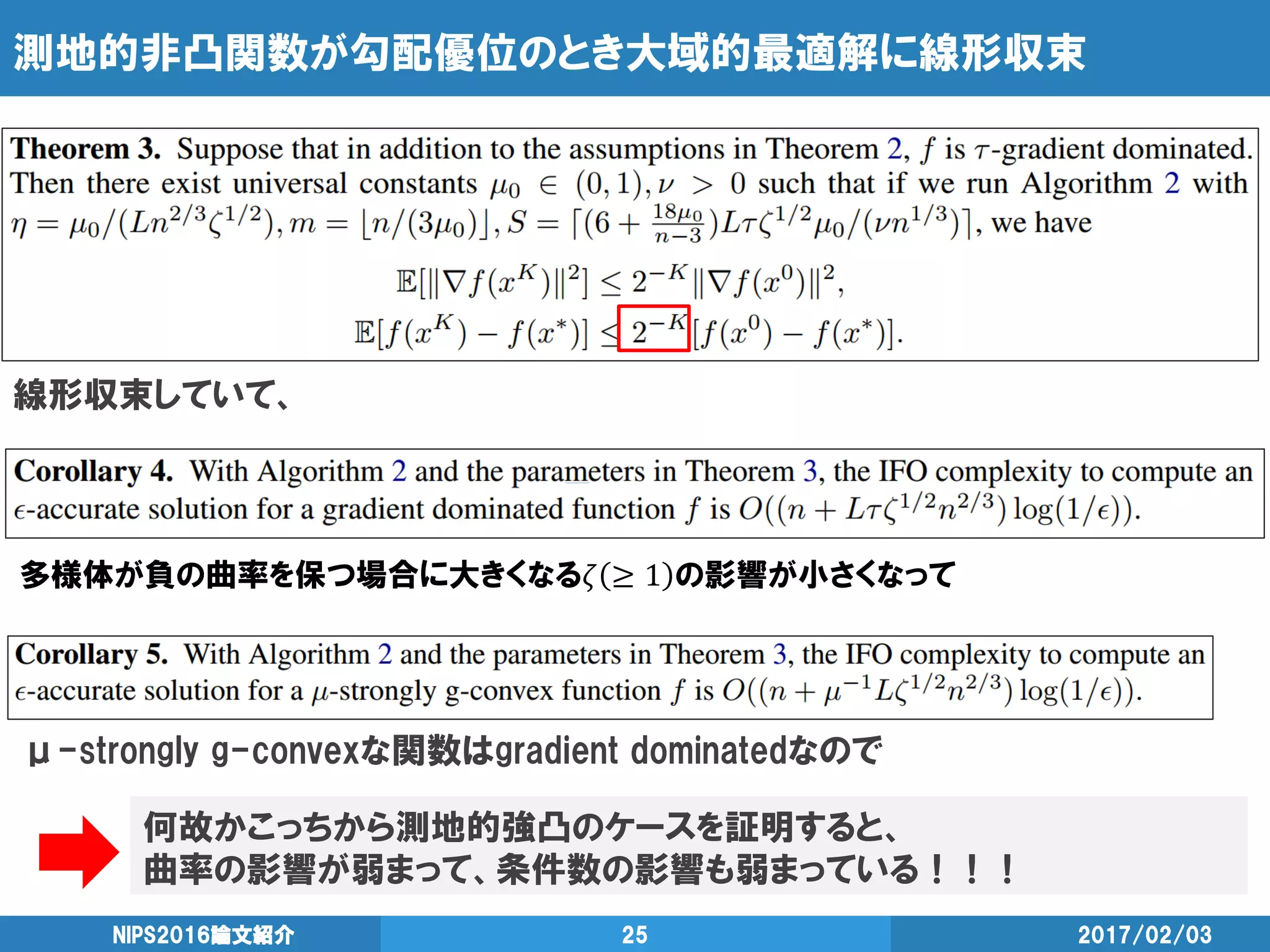
測地的非凸関数が勾配優位のとき大域的最適解に線形収束 線形収束していて、 2017/02/03NIPS2016論文紹介 25 μ-strongly g-convexな関数はgradient
dominatedなので 多様体が負の曲率を保つ場合に大きくなる𝜁 ≥ 1 の影響が小さくなって 何故かこっちから測地的強凸のケースを証明すると、 曲率の影響が弱まって、条件数の影響も弱まっている!!!
26.
証明は 絶賛勉強中 2017/02/03NIPS2016論文紹介 26
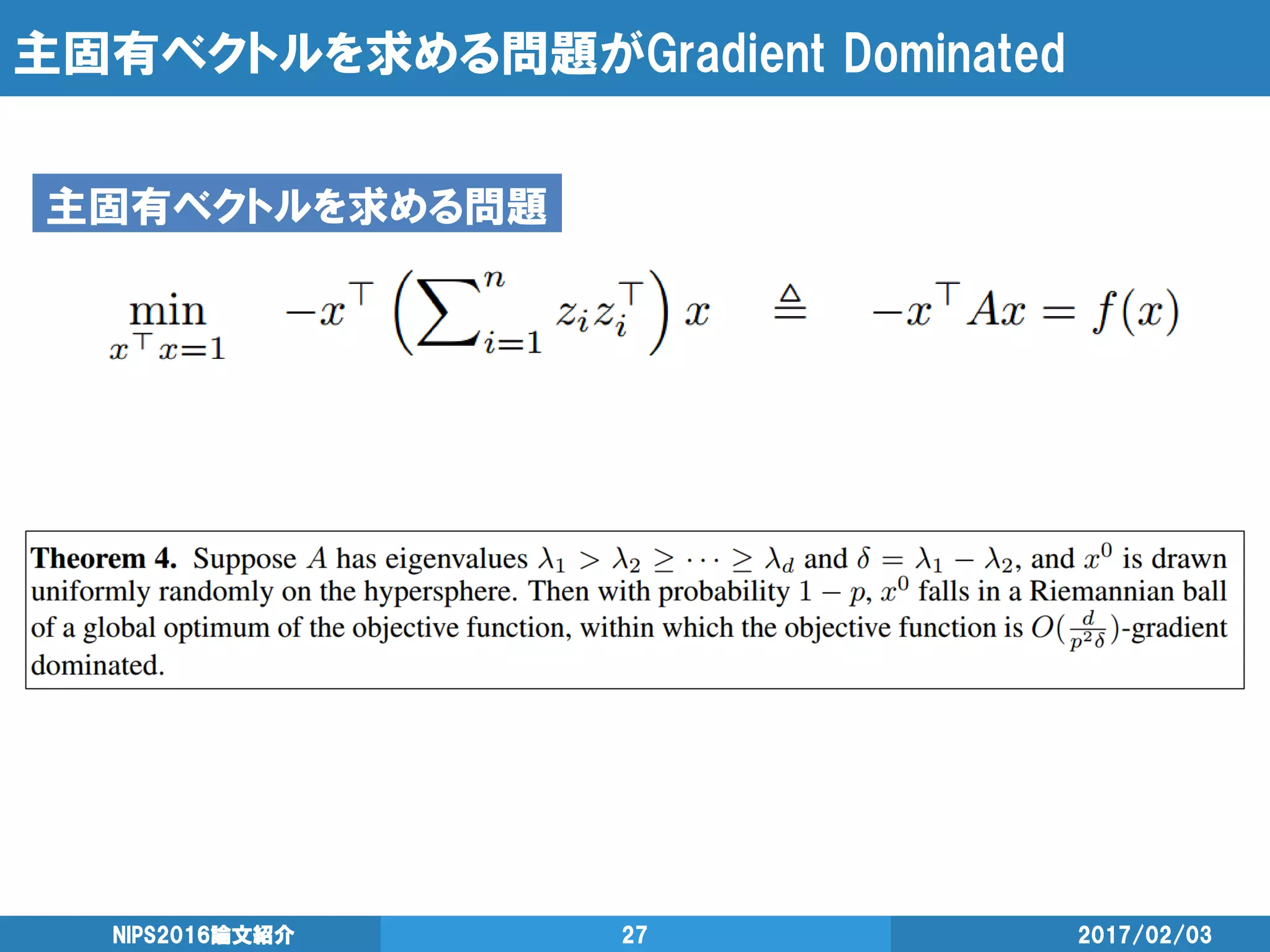
27.
主固有ベクトルを求める問題がGradient Dominated 2017/02/03NIPS2016論文紹介 27 主固有ベクトルを求める問題
28.
証明は 絶賛勉強中 2017/02/03NIPS2016論文紹介 28
29.
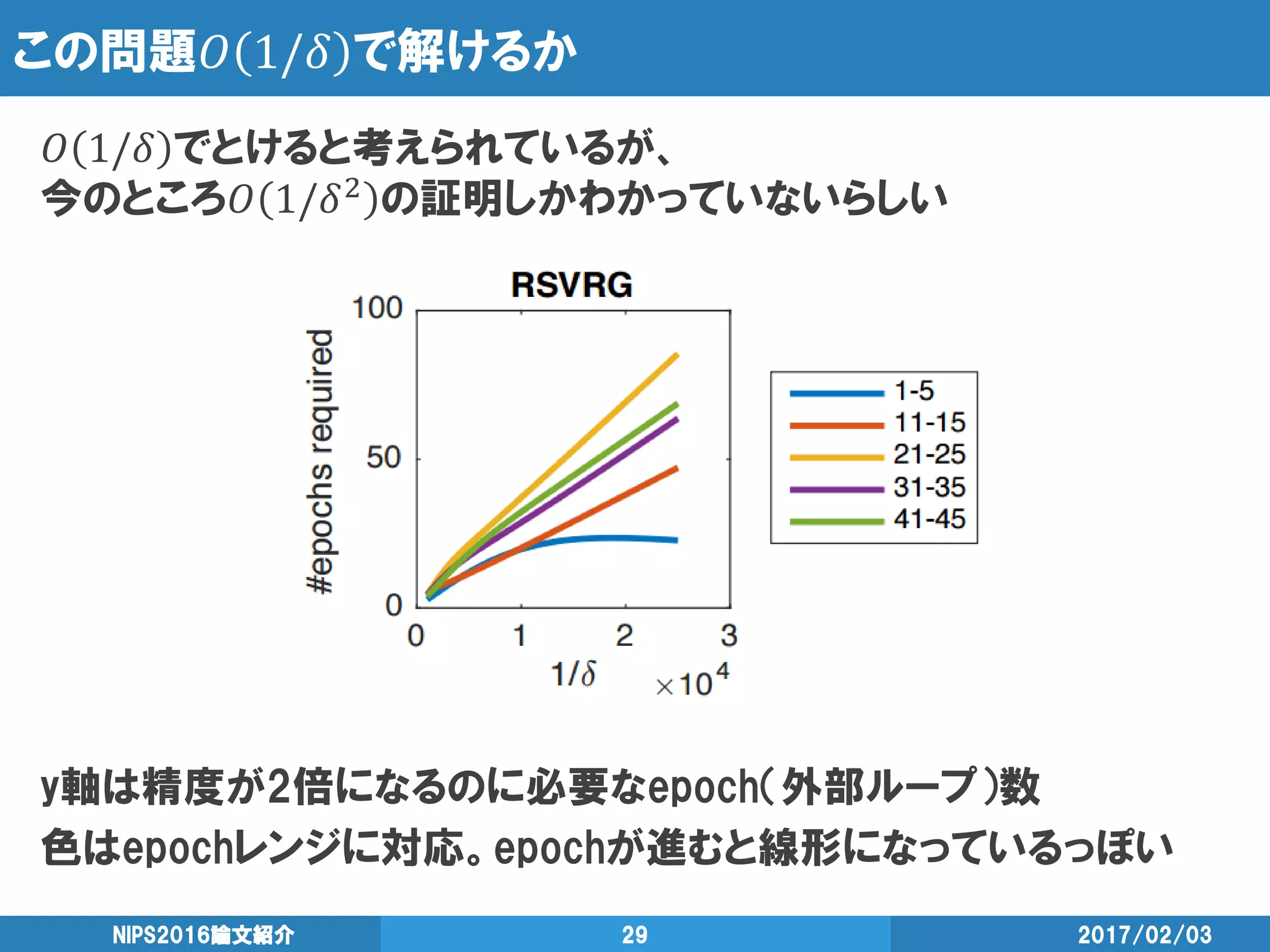
この問題𝑂 1/𝛿 で解けるか 2017/02/03NIPS2016論文紹介
29 𝑂 1/𝛿 でとけると考えられているが、 今のところ𝑂 1/𝛿2 の証明しかわかっていないらしい y軸は精度が2倍になるのに必要なepoch(外部ループ)数 色はepochレンジに対応。epochが進むと線形になっているっぽい
30.
数値実験: Riemman centroid 𝐴𝑖は半正定値行列 2017/02/03NIPS2016論文紹介
30 Riemman centroid • この問題はユークリッド空間だと非凸だが • リーマン多様体上だと測地的強凸の最適化
31.
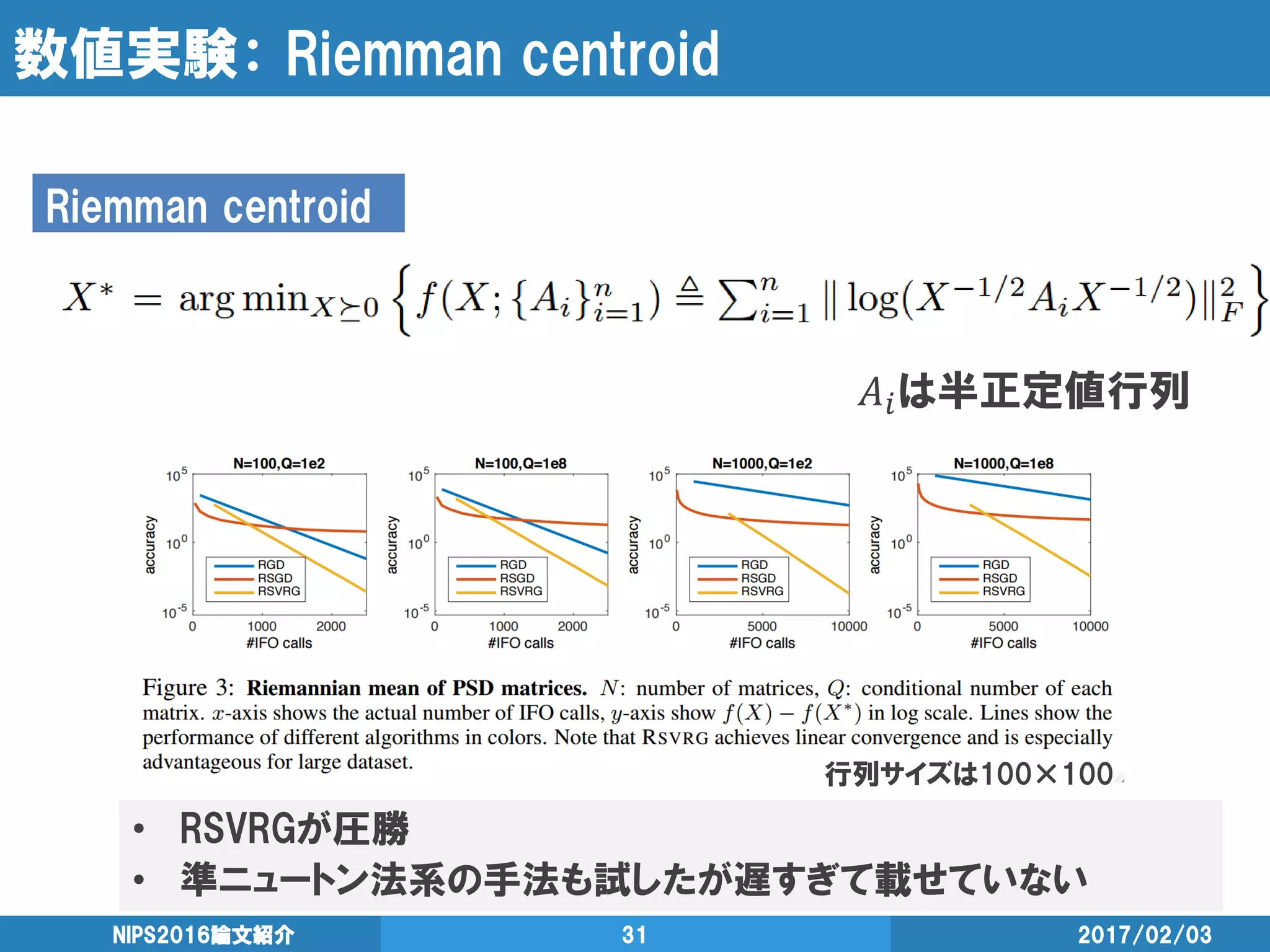
数値実験: Riemman centroid 𝐴𝑖は半正定値行列 2017/02/03NIPS2016論文紹介
31 Riemman centroid 行列サイズは100×100 • RSVRGが圧勝 • 準ニュートン法系の手法も試したが遅すぎて載せていない
32.
まとめ&議論 • SVRGをリーマン多様体上に初めて拡張 • 凸、強凸、非凸の場合の収束性を解析 •
勾配優位の場合に大域的収束性を証明 – より一般にリーマン多様体上で大域的収束性を保証できる問題群を一般 化できる可能性 • リーマン多様体上のよくあるテクニックを使った解析をしていない – レトラクションやVector transportなど 2017/02/03NIPS2016論文紹介 32 議論 まとめ
Download
![SVRGの威力
SVRG元論文[Johnson+ 2013]より
2017/02/03NIPS2016論文紹介 16](https://image.slidesharecdn.com/nips2016riemanniansvrgfaststochasticoptimizationonriemannianmanifolds-170218084852/75/NIPS2016-Riemannian-SVRG-fast-stochastic-optimization-on-riemannian-manifolds-16-2048.jpg)










![[DL輪読会]モデルベース強化学習とEnergy Based Model](https://cdn.slidesharecdn.com/ss_thumbnails/energybasedmodel-191129002008-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会] “Asymmetric Tri-training for Unsupervised Domain Adaptation (ICML2017...](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacks20170728-170728025901-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Hindsight Experience Replay](https://cdn.slidesharecdn.com/ss_thumbnails/her-180105002310-thumbnail.jpg?width=640&height=640&fit=bounds)









![[DL輪読会]Learning Latent Dynamics for Planning from Pixels](https://cdn.slidesharecdn.com/ss_thumbnails/taniguchi20181221-190104064850-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]相互情報量最大化による表現学習](https://cdn.slidesharecdn.com/ss_thumbnails/20190913iwasawa-190913002312-thumbnail.jpg?width=640&height=640&fit=bounds)