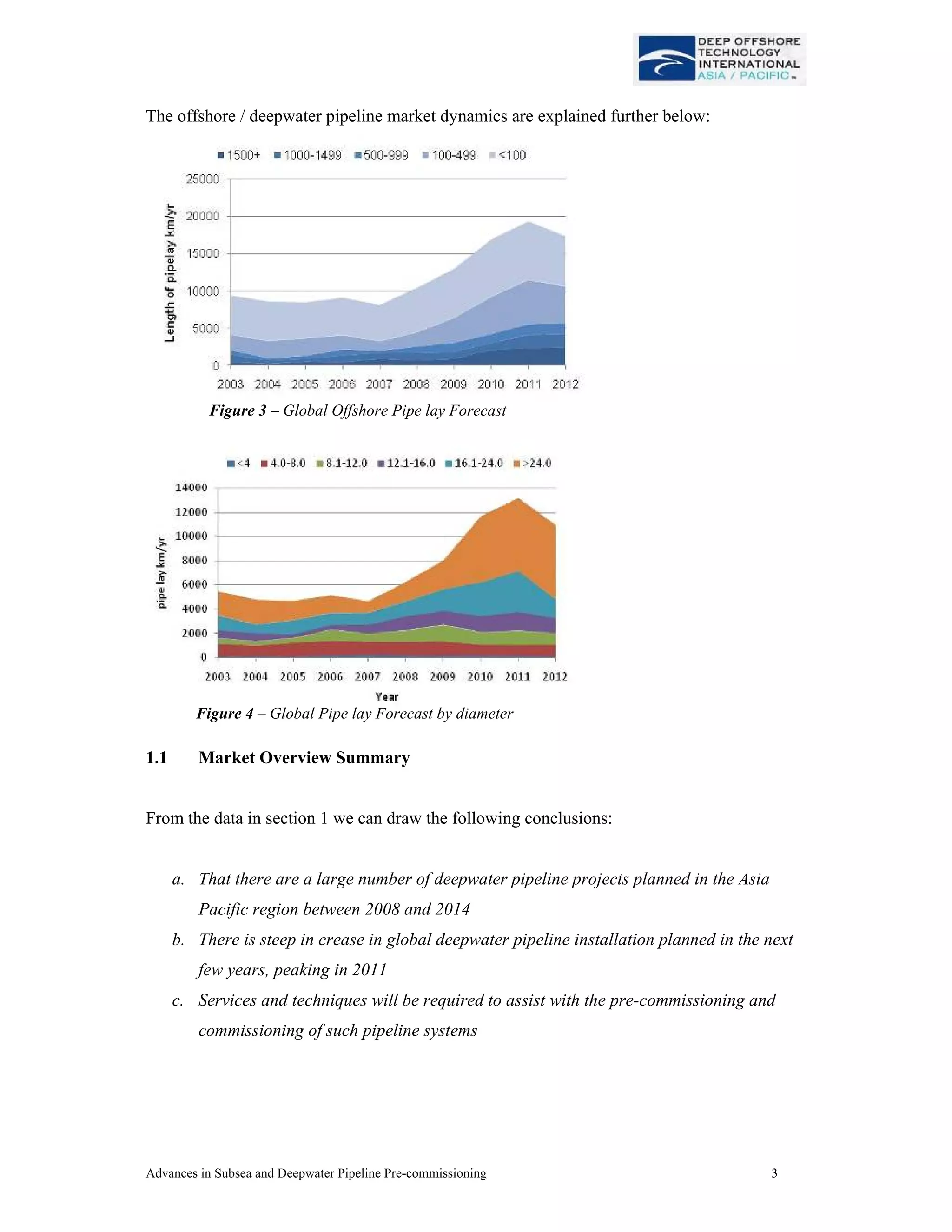
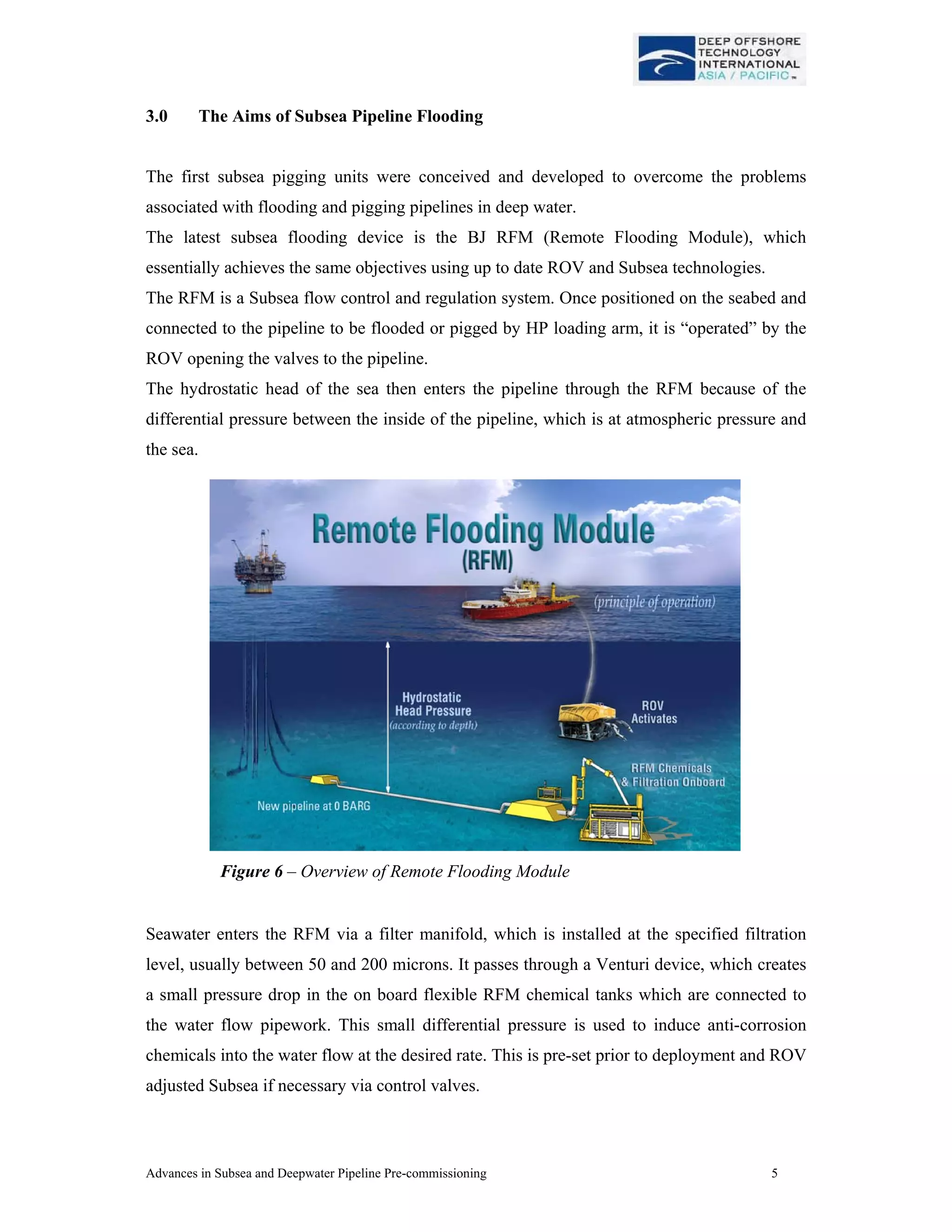
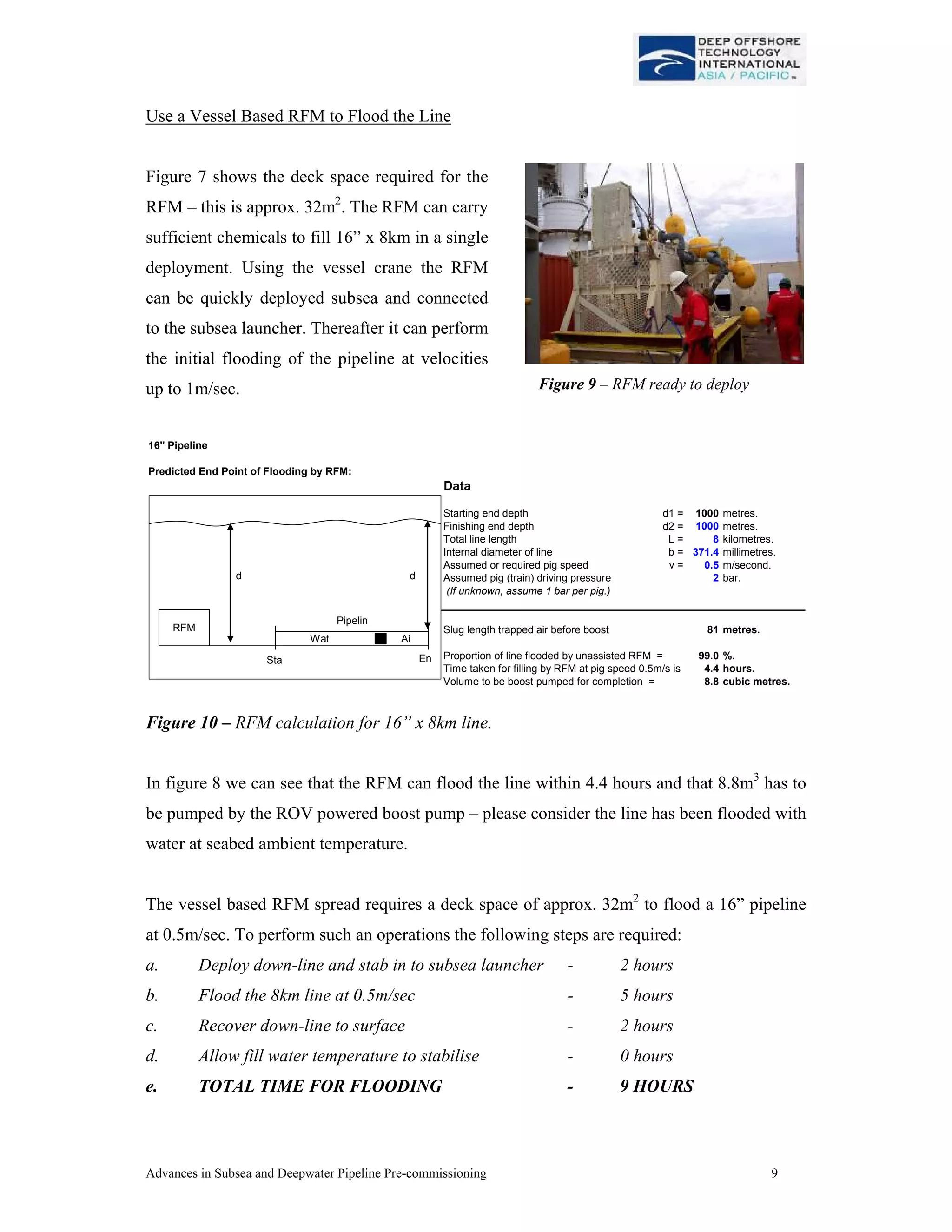
This document discusses advances in pre-commissioning of subsea and deepwater pipelines. It describes challenges of testing pipelines without surface connections and reviews technologies like remote flooding modules and smart gauge tools to enable subsea testing. Using a case study of an 8km, 16" pipeline at 1,000m depth, it analyzes vessel requirements and costs of traditional vessel-based systems versus newer remote flooding modules. The remote flooding module reduces vessel time on site from 77 hours to 9 hours, space needs from 290m2 to 32m2, and eliminates the 48 hour water temperature stabilization period to lower overall project costs.