スプリングセミナー2016"スマートフォンを用いた自動避難誘導アプリを体験してみよう"
•
0 likes•721 views

大規模災害発生時には被災者を迅速かつ安全に避難先へと誘導する必要があります。本実習では、誰でも所持しているスマートフォンを用いて、位置情報の計測による避難行動の測定や、被災状況の推定、避難者への避難経路の提示といった、避難誘導に必須となる機能を自動で提供可能なアプリを体験してもらうとともに、一部機能の作成にチャレンジしてもらいます。

Recommended
More Related Content
More from 奈良先端大 情報科学研究科
More from 奈良先端大 情報科学研究科 (20)
Recently uploaded
Recently uploaded (7)
スプリングセミナー2016"スマートフォンを用いた自動避難誘導アプリを体験してみよう"
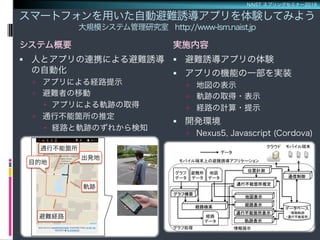
- 1. NAIST スプリングセミナー2016 システム概要 実施内容 § 人とアプリの連携による避難誘導 の自動化 ú アプリによる経路提示 ú 避難者の移動 アプリによる軌跡の取得 ú 通行不能箇所の推定 経路と軌跡のずれから検知 § 避難誘導アプリの体験 § アプリの機能の一部を実装 ú 地図の表示 ú 軌跡の取得・表示 ú 経路の計算・提示 § 開発環境 ú Nexus5, Javascript (Cordova) スマートフォンを用いた自動避難誘導アプリを体験してみよう 大規模システム管理研究室 http://www-lsm.naist.jp 軌跡 通行不能箇所 避難経路 出発地 目的地