Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Nobuyuki Matsui
PPTX, PDF
2,379 views
【第5回東京SoftLayer勉強会】LT7 SoftLayerでOpenStackを動かしてみた
第5回東京SoftLayer勉強会 LT7 「SoftLayerでOpenStackを動かしてみた」の資料です。
Technology
◦
Read more
3
Save
Share
Embed
Embed presentation
Download
Downloaded 20 times
1
/ 14
2
/ 14
3
/ 14
4
/ 14
5
/ 14
6
/ 14
7
/ 14
8
/ 14
9
/ 14
10
/ 14
11
/ 14
12
/ 14
13
/ 14
14
/ 14
More Related Content
PDF
OpenStackトラブルシューティング入門
by
VirtualTech Japan Inc.
PDF
知らないと地味にハマるOpen stackインストール時の注意点
by
d-shen
PDF
OpenStack Icehouse構築手順書
by
VirtualTech Japan Inc.
PPTX
RDOを使ったOpenStack Havana - Neutron 構築編
by
VirtualTech Japan Inc.
PPTX
OpenStack マルチノード環境構築
by
HommasSlide
PDF
OpenStack検証環境構築・トラブルシューティング入門 - OpenStack最新情報セミナー 2014年8月
by
VirtualTech Japan Inc.
PDF
OpenStack構築手順書Mitaka版 (期間限定公開)
by
VirtualTech Japan Inc.
PDF
OpenStackで始めるクラウド環境構築入門(Horizon 基礎編)
by
VirtualTech Japan Inc.
OpenStackトラブルシューティング入門
by
VirtualTech Japan Inc.
知らないと地味にハマるOpen stackインストール時の注意点
by
d-shen
OpenStack Icehouse構築手順書
by
VirtualTech Japan Inc.
RDOを使ったOpenStack Havana - Neutron 構築編
by
VirtualTech Japan Inc.
OpenStack マルチノード環境構築
by
HommasSlide
OpenStack検証環境構築・トラブルシューティング入門 - OpenStack最新情報セミナー 2014年8月
by
VirtualTech Japan Inc.
OpenStack構築手順書Mitaka版 (期間限定公開)
by
VirtualTech Japan Inc.
OpenStackで始めるクラウド環境構築入門(Horizon 基礎編)
by
VirtualTech Japan Inc.
What's hot
PDF
Big Cloud Fabric製品紹介とOpenStack Neutron Plugin 実装概要
by
Shohei Yoshimoto
PDF
OpenStack Grizzly構築手順書
by
VirtualTech Japan Inc.
PDF
OpenStack QuickStart - Icehouse
by
Hideki Saito
PDF
OpenStack Liberty をインストールしてみた
by
Takashi Umeno
PPTX
Canonicalが支える、さくっと使えるUbuntu OpenStack - OpenStack Day in ITpro EXPO 2014
by
VirtualTech Japan Inc.
PDF
OpenStackをコマンドで攻める! 構築・運用とトラブル解決 - OpenStack最新情報セミナー 2014年6月
by
VirtualTech Japan Inc.
PDF
OpenStack勉強会
by
Yuki Obara
PDF
RDOを使ったOpenStack Havana - Neutron 構築編 :補足資料
by
VirtualTech Japan Inc.
PDF
OpenStackで始めるクラウド環境構築入門
by
VirtualTech Japan Inc.
PDF
NTTデータ様講演 OpenStack最新情報セミナー 2014年6月
by
VirtualTech Japan Inc.
PPTX
OpenStack概要 ~仮想ネットワーク~
by
Masaya Aoyama
PDF
OpenStack構築手順書 Juno版
by
VirtualTech Japan Inc.
PDF
OpenStackクラウド基盤構築ハンズオンセミナー 第1日:講義No1
by
Etsuji Nakai
PPTX
OpenStackで始めるクラウド環境構築入門
by
VirtualTech Japan Inc.
PDF
サイバーエージェント様 導入事例:OpenStack Fast Track – 若葉マークStackerのStacker教習所 - OpenStack最新...
by
VirtualTech Japan Inc.
PDF
openstack_neutron-ovs_osc2014tf_20141019
by
Takehiro Kudou
PDF
OpenStack(RDO/Grizzly) ダッシュボード利用演習
by
Etsuji Nakai
PPTX
Mirantis OpenStack 5.0で作るOpenStack Icehouse構築入門
by
VirtualTech Japan Inc.
PDF
ZabbixによるOpenStack監視のご紹介
by
VirtualTech Japan Inc.
PDF
OpenStack QuickStart - havana
by
Hideki Saito
Big Cloud Fabric製品紹介とOpenStack Neutron Plugin 実装概要
by
Shohei Yoshimoto
OpenStack Grizzly構築手順書
by
VirtualTech Japan Inc.
OpenStack QuickStart - Icehouse
by
Hideki Saito
OpenStack Liberty をインストールしてみた
by
Takashi Umeno
Canonicalが支える、さくっと使えるUbuntu OpenStack - OpenStack Day in ITpro EXPO 2014
by
VirtualTech Japan Inc.
OpenStackをコマンドで攻める! 構築・運用とトラブル解決 - OpenStack最新情報セミナー 2014年6月
by
VirtualTech Japan Inc.
OpenStack勉強会
by
Yuki Obara
RDOを使ったOpenStack Havana - Neutron 構築編 :補足資料
by
VirtualTech Japan Inc.
OpenStackで始めるクラウド環境構築入門
by
VirtualTech Japan Inc.
NTTデータ様講演 OpenStack最新情報セミナー 2014年6月
by
VirtualTech Japan Inc.
OpenStack概要 ~仮想ネットワーク~
by
Masaya Aoyama
OpenStack構築手順書 Juno版
by
VirtualTech Japan Inc.
OpenStackクラウド基盤構築ハンズオンセミナー 第1日:講義No1
by
Etsuji Nakai
OpenStackで始めるクラウド環境構築入門
by
VirtualTech Japan Inc.
サイバーエージェント様 導入事例:OpenStack Fast Track – 若葉マークStackerのStacker教習所 - OpenStack最新...
by
VirtualTech Japan Inc.
openstack_neutron-ovs_osc2014tf_20141019
by
Takehiro Kudou
OpenStack(RDO/Grizzly) ダッシュボード利用演習
by
Etsuji Nakai
Mirantis OpenStack 5.0で作るOpenStack Icehouse構築入門
by
VirtualTech Japan Inc.
ZabbixによるOpenStack監視のご紹介
by
VirtualTech Japan Inc.
OpenStack QuickStart - havana
by
Hideki Saito
Viewers also liked
PDF
Beneficios de invertir en Uniformes
by
Garment Printing - Print This Print That Ltd
PDF
Beyond JSON @ Mobile.Warsaw
by
Maxim Zaks
PDF
Dental Implants [infographic]
by
Howard M. Steinberg, DMD, MDS
PPT
Welcome to Animation Class
by
walkers
PPT
Social Media
by
Angus Fraser
PPTX
8 YouTube Channels for Aspiring Entrepreneurs | Avery Eisenreich
by
Avery Eisenreich
PDF
3 d pie chart circular puzzle with hole in center pieces 9 stages style 4 pow...
by
SlideTeam.net
PDF
Як_правильно_укласти_договір
by
Vitalij Misjats
PPSX
Nuevas tecnologías de la información y comunicación (ntic)
by
Carol Plata
PPTX
e-Patients en e-Health (Masterclass VUMC)
by
Michael van Balken
PPT
Protocolo de manejo de Fibrilación Auricular no valvular
by
Centro Fuensanta Valencia. Departamento Hospital General
PPTX
Customer Service Alberta
by
BrianWoodland
PDF
Horario 8º semestre
by
Elizeu Won Ancken
PDF
Welcome to the Funnel: We've Got Leads and Names
by
Kapost
PPSX
Media Auditing: Convegno Somedia 2004 - Furlanetto
by
Paola Furlanetto
PDF
Ie – 514 Current Trends, Problems And Issues
by
Aris Santos
PPT
GoToAssist - Just Listen: How to Get Through to Anyone - Tips from a Former F...
by
Dr. Mark Goulston
PPTX
Артемий Анцупов "Agile PMO"
by
Проектные сервисы
PDF
Development C++ Community
by
Akira Takahashi
Beneficios de invertir en Uniformes
by
Garment Printing - Print This Print That Ltd
Beyond JSON @ Mobile.Warsaw
by
Maxim Zaks
Dental Implants [infographic]
by
Howard M. Steinberg, DMD, MDS
Welcome to Animation Class
by
walkers
Social Media
by
Angus Fraser
8 YouTube Channels for Aspiring Entrepreneurs | Avery Eisenreich
by
Avery Eisenreich
3 d pie chart circular puzzle with hole in center pieces 9 stages style 4 pow...
by
SlideTeam.net
Як_правильно_укласти_договір
by
Vitalij Misjats
Nuevas tecnologías de la información y comunicación (ntic)
by
Carol Plata
e-Patients en e-Health (Masterclass VUMC)
by
Michael van Balken
Protocolo de manejo de Fibrilación Auricular no valvular
by
Centro Fuensanta Valencia. Departamento Hospital General
Customer Service Alberta
by
BrianWoodland
Horario 8º semestre
by
Elizeu Won Ancken
Welcome to the Funnel: We've Got Leads and Names
by
Kapost
Media Auditing: Convegno Somedia 2004 - Furlanetto
by
Paola Furlanetto
Ie – 514 Current Trends, Problems And Issues
by
Aris Santos
GoToAssist - Just Listen: How to Get Through to Anyone - Tips from a Former F...
by
Dr. Mark Goulston
Артемий Анцупов "Agile PMO"
by
Проектные сервисы
Development C++ Community
by
Akira Takahashi
Similar to 【第5回東京SoftLayer勉強会】LT7 SoftLayerでOpenStackを動かしてみた
PDF
OpenStack + OpenContrailで実現するマルチテナントIaaSのご紹介
by
Takashi Sogabe
PPTX
[SoftLayer Summit 2015] DockerとOpenVNetを用いたSoftLayer VLAN上への仮想ネットワークオーバーレイ
by
cloudconductor
PPTX
○○○で作るOpenStack+Contrail環境
by
VirtualTech Japan Inc.
PDF
OpenStack Updates
by
Masanori Itoh
PDF
「Neutronになって理解するOpenStack Network」~Neutron/Open vSwitchなどNeutronと周辺技術の解説~ - ...
by
VirtualTech Japan Inc.
PDF
OpenStackをさらに”使う”技術 概要と基礎操作
by
irix_jp
PDF
Havana版 RDO-QuickStart-3 (140421-Havana-RDO-QuickStart-3.pdf)
by
VirtualTech Japan Inc.
PPTX
OpenStack本番環境の作り方 - Interop 2016
by
VirtualTech Japan Inc.
PPTX
クラウド環境におけるオープンソースウェアの現状について、OpenStackを中心に
by
VirtualTech Japan Inc.
PDF
オーバーレイネットワークで実現するプライベートクラウド -OpenStack/OpenContrailを用いたプライベートクラウドの構築及び評価計画のご紹介-
by
Takashi Sogabe
PPTX
OpenStack管理者入門 - OpenStack最新情報セミナー 2014年12月
by
VirtualTech Japan Inc.
PDF
JOSUG 34th Meetup
by
irix_jp
PDF
ML2/OVN アーキテクチャ概観
by
Yamato Tanaka
PDF
OpenStack with OpenFlow
by
Toshiki Tsuboi
PDF
OpenStack入門 2016/06/10
by
株式会社 NTTテクノクロス
PDF
SR-IOV Networking in OpenStack - OpenStack最新情報セミナー 2016年3月
by
VirtualTech Japan Inc.
PDF
Havana版 RDO-QuickStart-4 (140421-Havana-RDO-QuickStart-4.pdf)
by
VirtualTech Japan Inc.
PPTX
OpenStack本番環境の作り方
by
VirtualTech Japan Inc.
PDF
OpenStack Summit November 2014 Paris出張報告
by
Mitsuhiro SHIGEMATSU
PDF
OpenStackクラウド基盤構築ハンズオンセミナー 第2日:講義No2
by
Etsuji Nakai
OpenStack + OpenContrailで実現するマルチテナントIaaSのご紹介
by
Takashi Sogabe
[SoftLayer Summit 2015] DockerとOpenVNetを用いたSoftLayer VLAN上への仮想ネットワークオーバーレイ
by
cloudconductor
○○○で作るOpenStack+Contrail環境
by
VirtualTech Japan Inc.
OpenStack Updates
by
Masanori Itoh
「Neutronになって理解するOpenStack Network」~Neutron/Open vSwitchなどNeutronと周辺技術の解説~ - ...
by
VirtualTech Japan Inc.
OpenStackをさらに”使う”技術 概要と基礎操作
by
irix_jp
Havana版 RDO-QuickStart-3 (140421-Havana-RDO-QuickStart-3.pdf)
by
VirtualTech Japan Inc.
OpenStack本番環境の作り方 - Interop 2016
by
VirtualTech Japan Inc.
クラウド環境におけるオープンソースウェアの現状について、OpenStackを中心に
by
VirtualTech Japan Inc.
オーバーレイネットワークで実現するプライベートクラウド -OpenStack/OpenContrailを用いたプライベートクラウドの構築及び評価計画のご紹介-
by
Takashi Sogabe
OpenStack管理者入門 - OpenStack最新情報セミナー 2014年12月
by
VirtualTech Japan Inc.
JOSUG 34th Meetup
by
irix_jp
ML2/OVN アーキテクチャ概観
by
Yamato Tanaka
OpenStack with OpenFlow
by
Toshiki Tsuboi
OpenStack入門 2016/06/10
by
株式会社 NTTテクノクロス
SR-IOV Networking in OpenStack - OpenStack最新情報セミナー 2016年3月
by
VirtualTech Japan Inc.
Havana版 RDO-QuickStart-4 (140421-Havana-RDO-QuickStart-4.pdf)
by
VirtualTech Japan Inc.
OpenStack本番環境の作り方
by
VirtualTech Japan Inc.
OpenStack Summit November 2014 Paris出張報告
by
Mitsuhiro SHIGEMATSU
OpenStackクラウド基盤構築ハンズオンセミナー 第2日:講義No2
by
Etsuji Nakai
More from Nobuyuki Matsui
PDF
FIWARE勉強会 20190913
by
Nobuyuki Matsui
PPTX
CCSE2019 TIS - 自律移動サービスロボットの地図とデータモデルの共通化への取り組み
by
Nobuyuki Matsui
PDF
FIWARE-based Robot Management Platform ~ RoboticBase~
by
Nobuyuki Matsui
PDF
Jazug-8th: Azure AKS & FIWARE & Robot
by
Nobuyuki Matsui
PDF
JTF2018 FIWARE x robot x IoT
by
Nobuyuki Matsui
PPTX
良いコードとは
by
Nobuyuki Matsui
PPTX
Dockerのネットワークについて
by
Nobuyuki Matsui
PPTX
【AWS Night in ITHD】AWSとのSoftLayerで仮想ネットワークオーバーレイ
by
Nobuyuki Matsui
PPTX
SoftLayer Bluemix SUMMIT 2015 : Intel Edisonクラスタ x Bluemixによる IoTアプリケーションの実装
by
Nobuyuki Matsui
PPTX
Jtf2015 edison consul_cluster
by
Nobuyuki Matsui
PDF
【第17回八子クラウド座談会 LT】CloudConductor+VDCのご紹介
by
Nobuyuki Matsui
PPTX
【第11回 クラウドごった煮(コンテナ勉強会)】Docker networking tools
by
Nobuyuki Matsui
PPTX
【Tech-Circle #3 & OCDET #7 SDS勉強会】 Ceph on SoftLayer
by
Nobuyuki Matsui
PPTX
Raspberry Pi + AWS + SoftEtherVPN + RemoteWorks = ?
by
Nobuyuki Matsui
PPTX
20140905 AWS Night in ITHD LT2
by
Nobuyuki Matsui
FIWARE勉強会 20190913
by
Nobuyuki Matsui
CCSE2019 TIS - 自律移動サービスロボットの地図とデータモデルの共通化への取り組み
by
Nobuyuki Matsui
FIWARE-based Robot Management Platform ~ RoboticBase~
by
Nobuyuki Matsui
Jazug-8th: Azure AKS & FIWARE & Robot
by
Nobuyuki Matsui
JTF2018 FIWARE x robot x IoT
by
Nobuyuki Matsui
良いコードとは
by
Nobuyuki Matsui
Dockerのネットワークについて
by
Nobuyuki Matsui
【AWS Night in ITHD】AWSとのSoftLayerで仮想ネットワークオーバーレイ
by
Nobuyuki Matsui
SoftLayer Bluemix SUMMIT 2015 : Intel Edisonクラスタ x Bluemixによる IoTアプリケーションの実装
by
Nobuyuki Matsui
Jtf2015 edison consul_cluster
by
Nobuyuki Matsui
【第17回八子クラウド座談会 LT】CloudConductor+VDCのご紹介
by
Nobuyuki Matsui
【第11回 クラウドごった煮(コンテナ勉強会)】Docker networking tools
by
Nobuyuki Matsui
【Tech-Circle #3 & OCDET #7 SDS勉強会】 Ceph on SoftLayer
by
Nobuyuki Matsui
Raspberry Pi + AWS + SoftEtherVPN + RemoteWorks = ?
by
Nobuyuki Matsui
20140905 AWS Night in ITHD LT2
by
Nobuyuki Matsui
【第5回東京SoftLayer勉強会】LT7 SoftLayerでOpenStackを動かしてみた
1.
第5回 東京SoftLayer勉強会 LT7 SoftLayerでOpenStackを動かしてみた 2014年12月22日 TIS株式会社
松井 暢之 @n_matsui / nbyk.matsui
2.
2 松井 暢之(まつい のぶゆき) TIS株式会社 コーポレート本部 戦略技術センター ~2003 2003~2008 2009 2010~2012 2013~ 現場PJでアーキテクト兼モデラー兼プログラマ兼…を歴任 基盤技術センター(現戦略技術センター)で不芳PJの火消しに奔走 全社生産性向上の企画策定に従事 オープンでエッジな技術を活用した事業企画に従事 Cloud
Orchestrator “CloudConductor®” の企画開発とOSS化開始 http://cloudconductor.org nbyk.matsui nmatsui nbyk.matsui @n_matsui
3.
本日の内容 構築したOpenStack on
SoftLayerの全体像 ホストサーバのネットワーク構成のポイント OpenStack上の仮想ネットワーク構成のポイント 3 構築手順の詳細は次の記事をご参照ください SoftLayer BareMetal上でOpenStack Icehouseを動作させる http://tech-sketch.jp/2014/12/softlayer-openstack-icehouse.html
4.
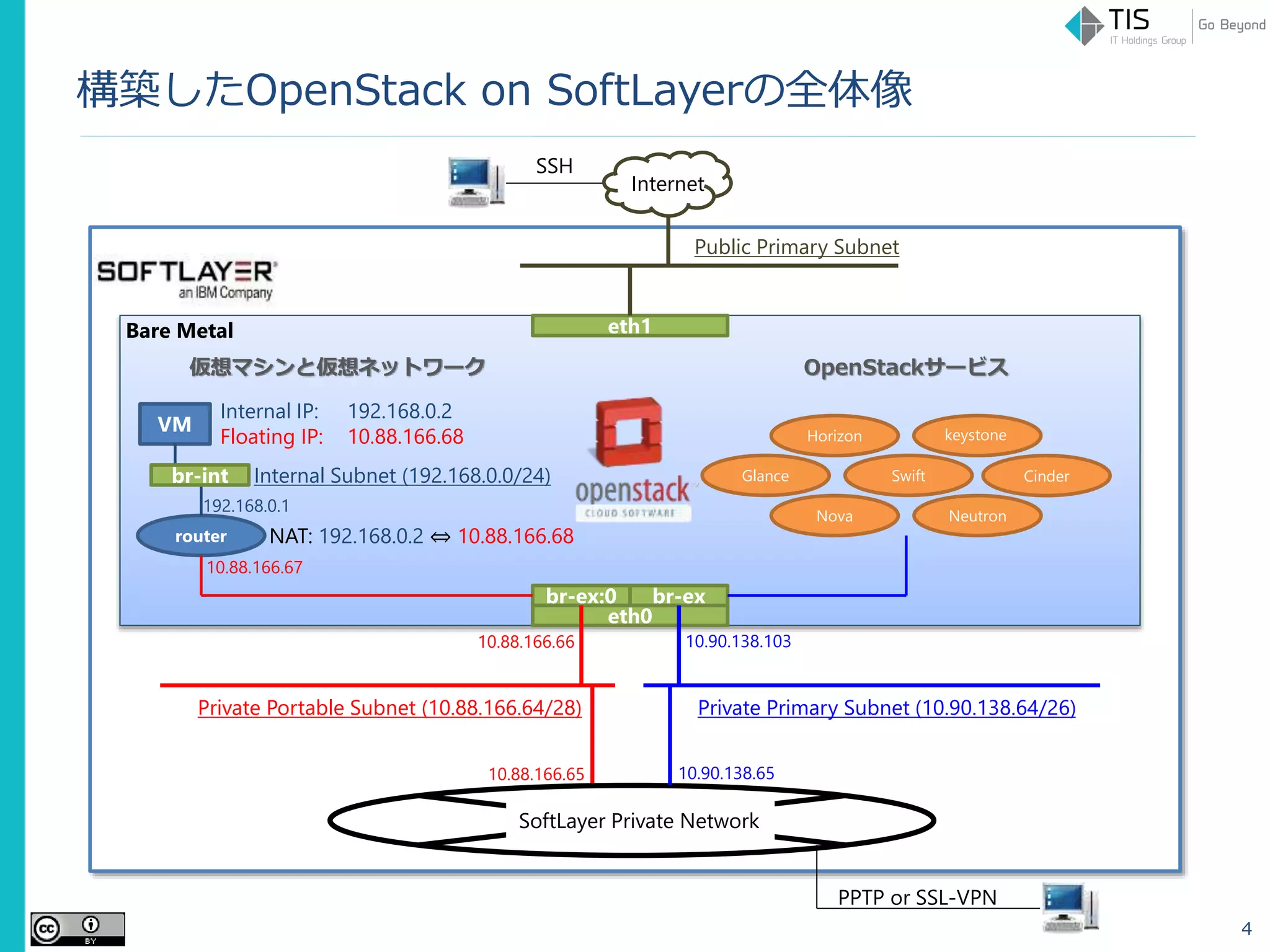
構築したOpenStack on SoftLayerの全体像 4 Bare
Metal VM Internal Subnet (192.168.0.0/24) Internal IP: 192.168.0.2 Floating IP: 10.88.166.68 Private Portable Subnet (10.88.166.64/28) router eth1 eth0 br-ex:0 br-ex 10.88.166.66 CinderSwiftGlance keystone NeutronNova Horizon NAT: 192.168.0.2 ⇔ 10.88.166.68 br-int 10.88.166.67 192.168.0.1 Private Primary Subnet (10.90.138.64/26) SoftLayer Private Network 10.88.166.65 10.90.138.65 10.90.138.103 仮想マシンと仮想ネットワーク OpenStackサービス Public Primary Subnet PPTP or SSL-VPN SSH Internet
5.
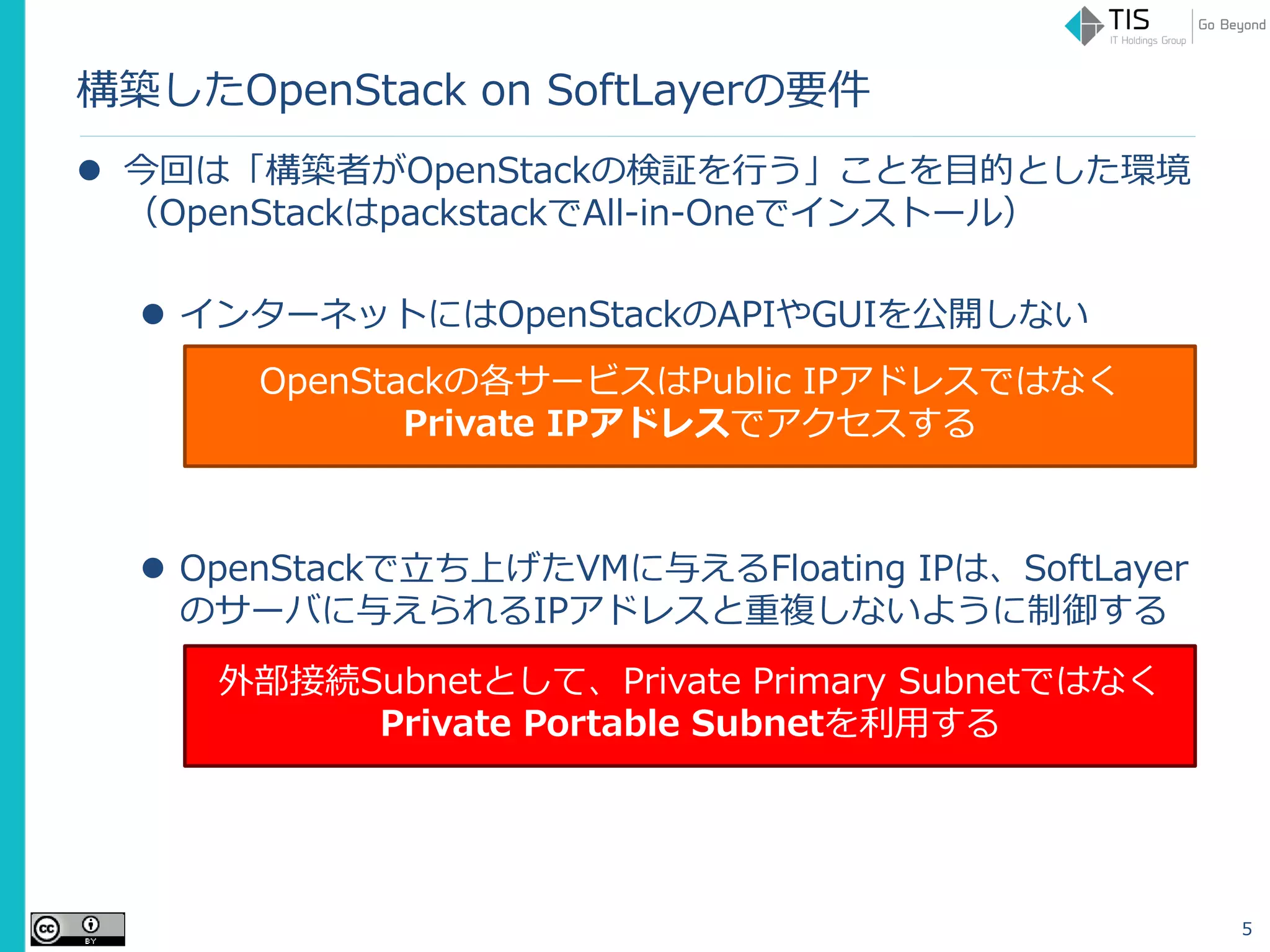
構築したOpenStack on SoftLayerの要件
今回は「構築者がOpenStackの検証を行う」ことを目的とした環境 (OpenStackはpackstackでAll-in-Oneでインストール) インターネットにはOpenStackのAPIやGUIを公開しない OpenStackで立ち上げたVMに与えるFloating IPは、SoftLayer のサーバに与えられるIPアドレスと重複しないように制御する 5 OpenStackの各サービスはPublic IPアドレスではなく Private IPアドレスでアクセスする 外部接続Subnetとして、Private Primary Subnetではなく Private Portable Subnetを利用する
6.
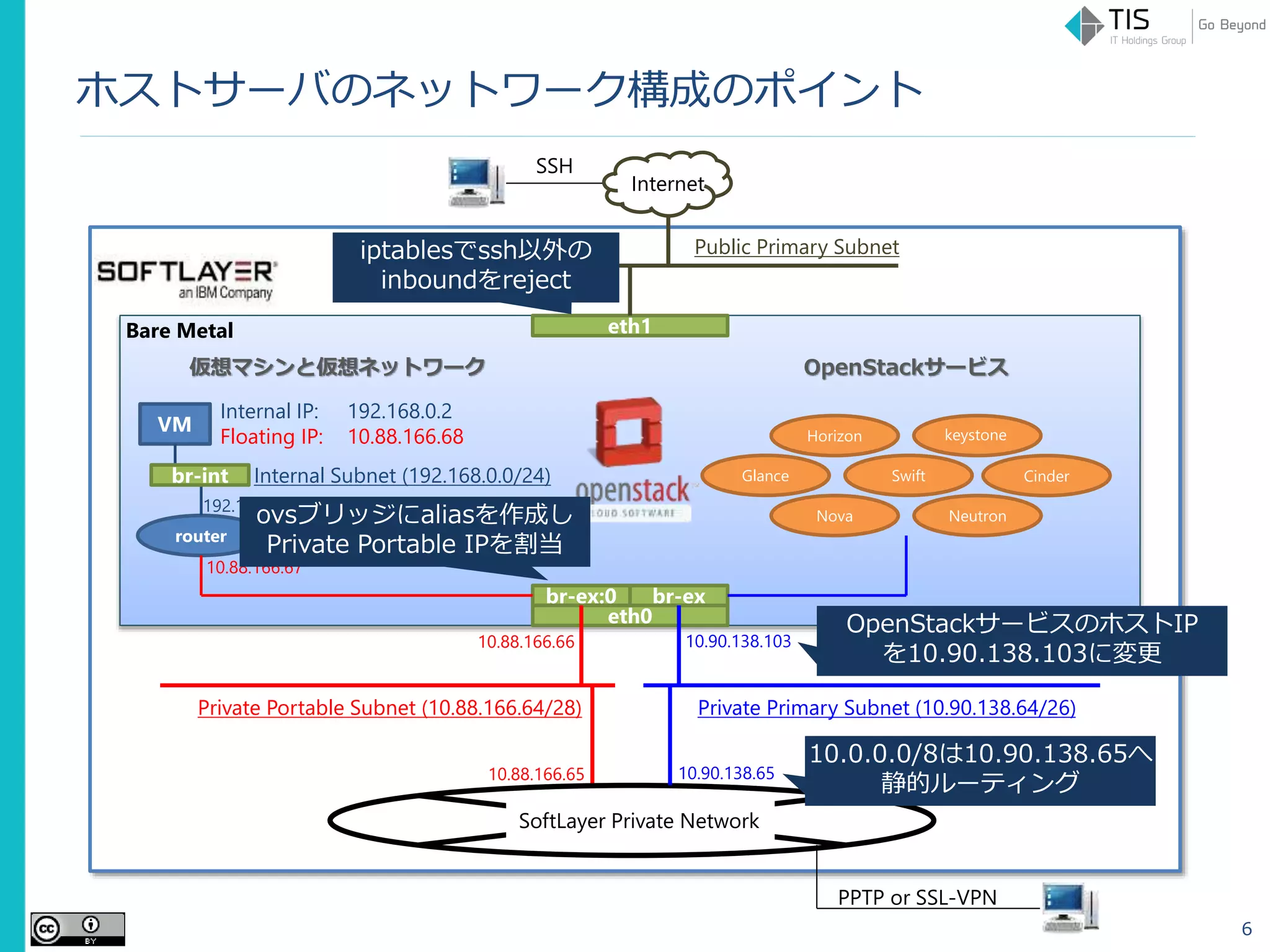
ホストサーバのネットワーク構成のポイント 6 Bare Metal VM Internal Subnet
(192.168.0.0/24) Internal IP: 192.168.0.2 Floating IP: 10.88.166.68 Private Portable Subnet (10.88.166.64/28) router eth1 eth0 br-ex:0 br-ex 10.88.166.66 CinderSwiftGlance keystone NeutronNova Horizon NAT: 192.168.0.2 ⇔ 10.88.166.68 br-int 10.88.166.67 192.168.0.1 Private Primary Subnet (10.90.138.64/26) SoftLayer Private Network 10.88.166.65 10.90.138.65 10.90.138.103 仮想マシンと仮想ネットワーク OpenStackサービス Public Primary Subnet PPTP or SSL-VPN SSH Internet iptablesでssh以外の inboundをreject OpenStackサービスのホストIP を10.90.138.103に変更 ovsブリッジにaliasを作成し Private Portable IPを割当 10.0.0.0/8は10.90.138.65へ 静的ルーティング
7.
ホストサーバのネットワーク構成のポイント ホストサーバのネットワークインタフェース 7 [root@openstack01 ~]#
ifconfig br-ex Link encap:Ethernet HWaddr 00:25:90:91:7F:80 inet addr:10.90.138.103 Bcast:10.90.138.127 Mask:255.255.255.192 ... br-ex:0 Link encap:Ethernet HWaddr 00:25:90:91:7F:80 inet addr:10.88.166.66 Bcast:10.88.166.79 Mask:255.255.255.240 ... br-int Link encap:Ethernet HWaddr 66:FC:5D:97:48:48 ... br-tun Link encap:Ethernet HWaddr 72:17:42:94:A8:44 ... eth0 Link encap:Ethernet HWaddr 00:25:90:91:7F:80 ... eth1 Link encap:Ethernet HWaddr 00:25:90:91:7F:81 inet addr:AAA.BBB.CCC.DDD Bcast:AAA.BBB.CCC.yyy Mask:255.255.255.248 ... lo Link encap:Local Loopback inet addr:127.0.0.1 Mask:255.0.0.0 ... virbr0 Link encap:Ethernet HWaddr 52:54:00:E7:5B:65 inet addr:192.168.122.1 Bcast:192.168.122.255 Mask:255.255.255.0 SoftLayerから与えられた Private Primary Subnet のIPアドレス 追加取得した Private Portable Subnet のIPアドレス SoftLayerから与えられた Public Primary SubnetのIPアドレス
8.
ホストサーバのネットワーク構成のポイント ホストサーバのルーティングテーブル VLAN
Spanningされた他のPrivate Subnetのサーバとも 通信できるように、SoftLayerのPrivate Network(10.0.0.0/8) 宛のパケットはbr-exを使ってPrivate Primary Subnetの gateway (10.90.138.65)へ送出する静的routeを設定 デフォルトゲートウェイはeth1側にあるPublic Primary Network のgatewayを設定 8 [root@openstack01 ~]# route -n Kernel IP routing table Destination Gateway Genmask Flags Metric Ref Use Iface AAA.BBB.CCC.zz 0.0.0.0 255.255.255.248 U 0 0 0 eth1 10.88.166.64 0.0.0.0 255.255.255.240 U 0 0 0 br-ex 10.90.138.64 0.0.0.0 255.255.255.192 U 0 0 0 br-ex 192.168.122.0 0.0.0.0 255.255.255.0 U 0 0 0 virbr0 169.254.0.0 0.0.0.0 255.255.0.0 U 1002 0 0 eth0 169.254.0.0 0.0.0.0 255.255.0.0 U 1003 0 0 eth1 169.254.0.0 0.0.0.0 255.255.0.0 U 1124 0 0 br-ex 10.0.0.0 10.90.138.65 255.0.0.0 UG 0 0 0 br-ex 0.0.0.0 AAA.BBB.CCC.x 0.0.0.0 UG 0 0 0 eth1 Private Primary Subnet Private Portable Subnet Public Primary Subnet
9.
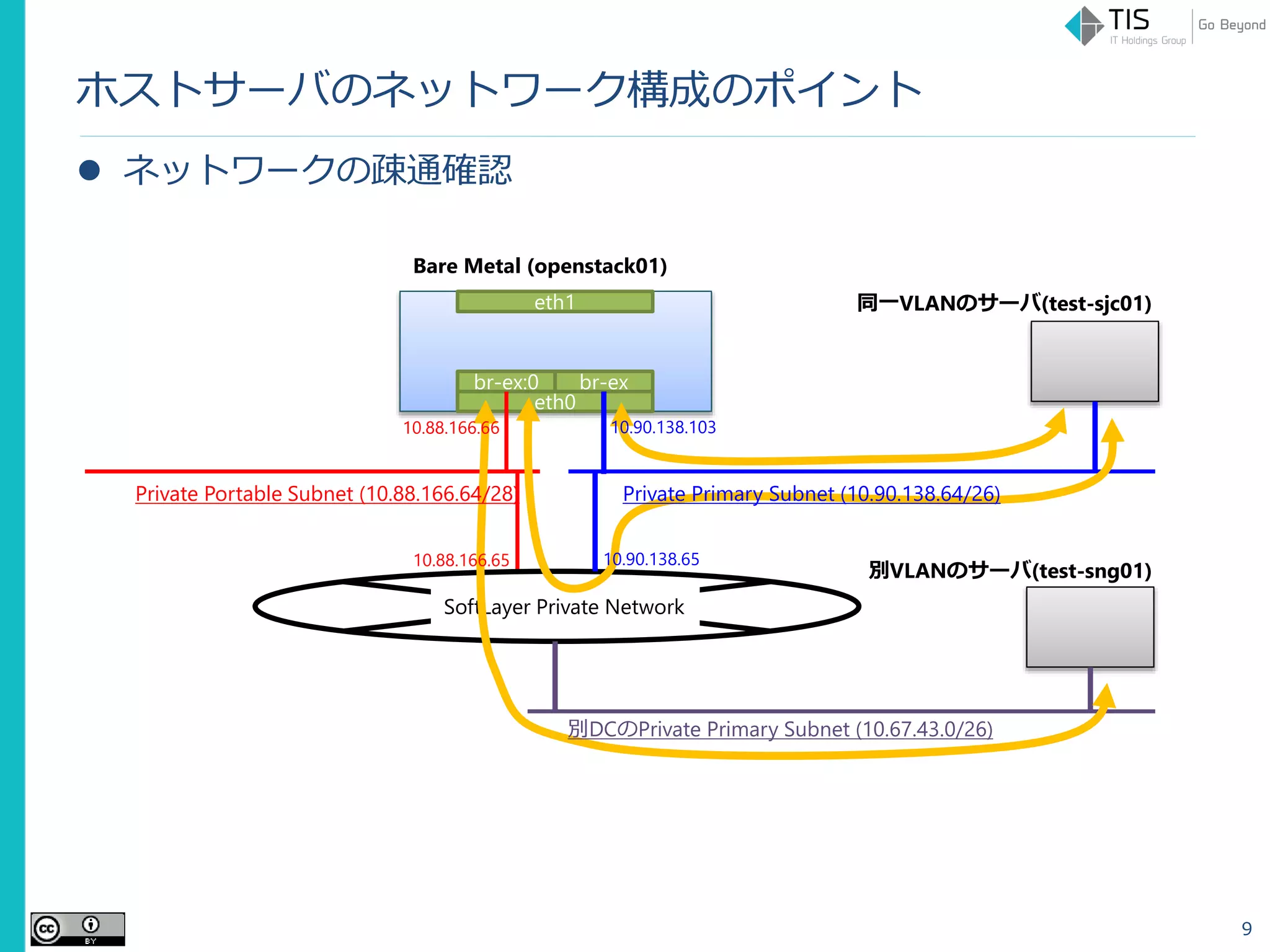
ホストサーバのネットワーク構成のポイント ネットワークの疎通確認 9 Bare Metal
(openstack01) eth1 eth0 br-ex:0 br-ex SoftLayer Private Network 同一VLANのサーバ(test-sjc01) 別VLANのサーバ(test-sng01) Private Portable Subnet (10.88.166.64/28) 10.88.166.66 Private Primary Subnet (10.90.138.64/26) 10.88.166.65 10.90.138.65 10.90.138.103 別DCのPrivate Primary Subnet (10.67.43.0/26)
10.
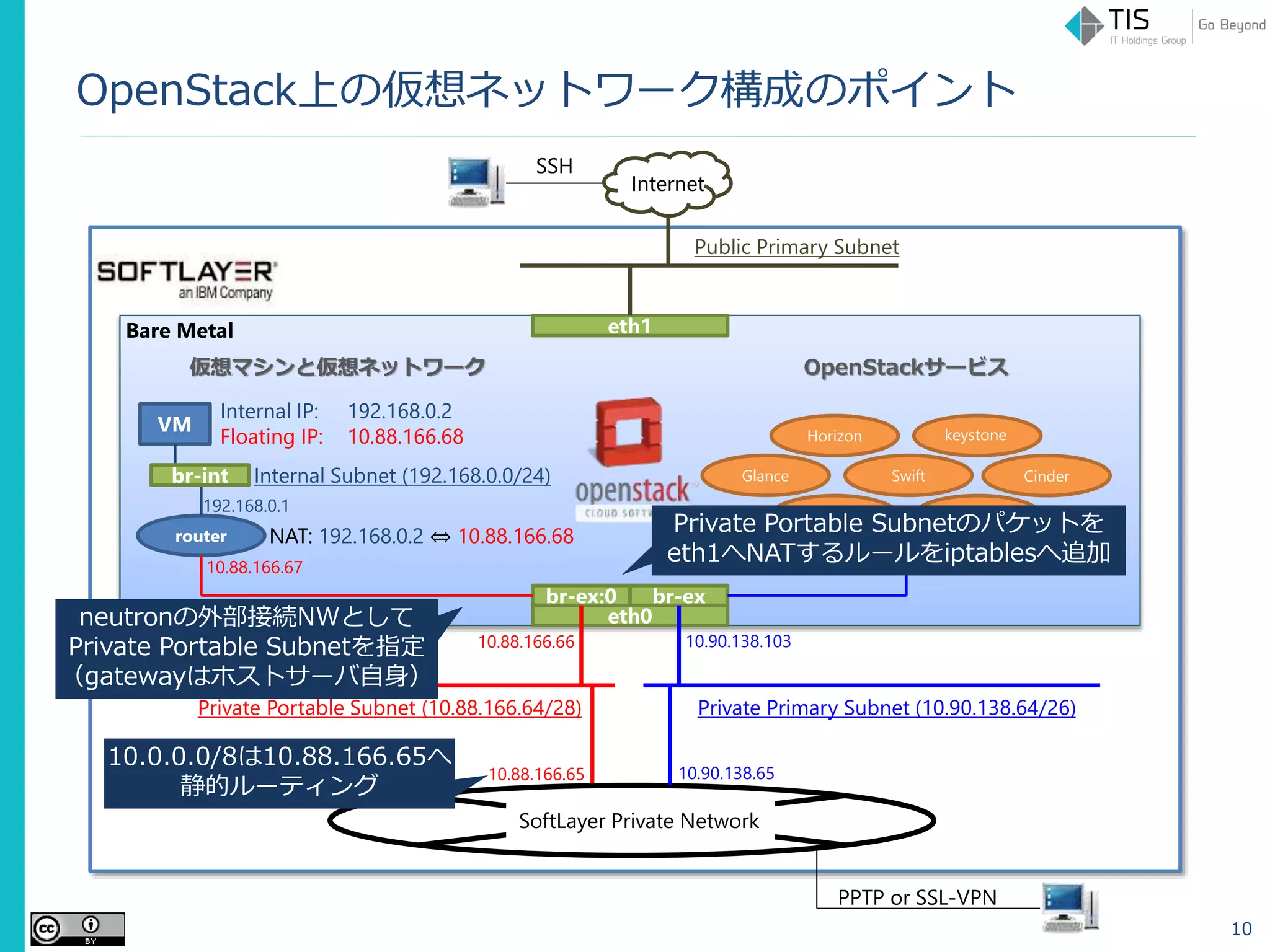
OpenStack上の仮想ネットワーク構成のポイント 10 Bare Metal VM Internal Subnet
(192.168.0.0/24) Internal IP: 192.168.0.2 Floating IP: 10.88.166.68 Private Portable Subnet (10.88.166.64/28) router eth1 eth0 br-ex:0 br-ex 10.88.166.66 CinderSwiftGlance keystone NeutronNova Horizon NAT: 192.168.0.2 ⇔ 10.88.166.68 br-int 10.88.166.67 192.168.0.1 Private Primary Subnet (10.90.138.64/26) SoftLayer Private Network 10.88.166.65 10.90.138.65 10.90.138.103 仮想マシンと仮想ネットワーク OpenStackサービス Public Primary Subnet PPTP or SSL-VPN SSH Internet neutronの外部接続NWとして Private Portable Subnetを指定 (gatewayはホストサーバ自身) Private Portable Subnetのパケットを eth1へNATするルールをiptablesへ追加 10.0.0.0/8は10.88.166.65へ 静的ルーティング
11.
OpenStack上の仮想ネットワーク構成のポイント 外部接続Subnetのgatewayルールをiptablesに設定 SoftLayerから与えられたPrivate
Portable Subnetのgatewayは インターネットへルーティングする経路を持たないため、 OpenStack上に作成したVMがインターネットに出られるように、 Private Portable Subnetのパケットをeth1へ転送してNATする ルールをiptablesに追加 念のため、Private IPのパケットをそのままインターネットへ 流さないようにDROPするルールも追加 11 [root@openstack01 ~]# iptables -A FORWARD -o eth1 -s 10.88.166.64/28 -j ACCEPT [root@openstack01 ~]# iptables -t nat -A POSTROUTING -o eth1 -s 10.88.166.64/28 -j MASQUERADE [root@openstack01 ~]# iptables -A OUTPUT -o eth1 -d 10.0.0.0/8 -j DROP [root@openstack01 ~]# iptables -A OUTPUT -o eth1 -d 172.16.0.0/12 -j DROP [root@openstack01 ~]# iptables -A OUTPUT -o eth1 -d 192.168.0.0/16 -j DROP [root@openstack01 ~]# iptables -A OUTPUT -o eth1 -d 127.0.0.0/8 -j DROP
12.
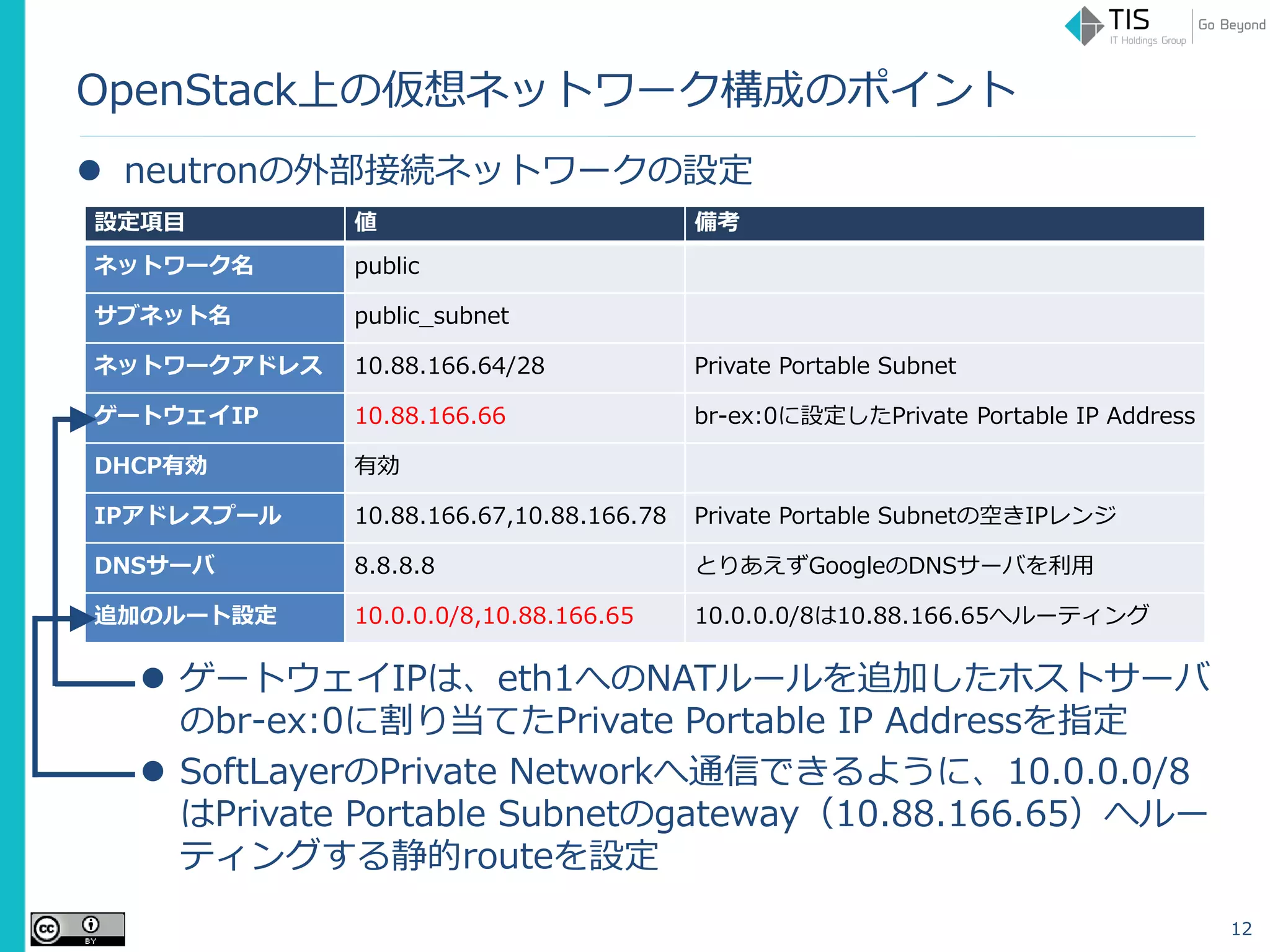
OpenStack上の仮想ネットワーク構成のポイント neutronの外部接続ネットワークの設定 ゲートウェイIPは、eth1へのNATルールを追加したホストサーバ のbr-ex:0に割り当てたPrivate
Portable IP Addressを指定 SoftLayerのPrivate Networkへ通信できるように、10.0.0.0/8 はPrivate Portable Subnetのgateway(10.88.166.65)へルー ティングする静的routeを設定 12 設定項目 値 備考 ネットワーク名 public サブネット名 public_subnet ネットワークアドレス 10.88.166.64/28 Private Portable Subnet ゲートウェイIP 10.88.166.66 br-ex:0に設定したPrivate Portable IP Address DHCP有効 有効 IPアドレスプール 10.88.166.67,10.88.166.78 Private Portable Subnetの空きIPレンジ DNSサーバ 8.8.8.8 とりあえずGoogleのDNSサーバを利用 追加のルート設定 10.0.0.0/8,10.88.166.65 10.0.0.0/8は10.88.166.65へルーティング
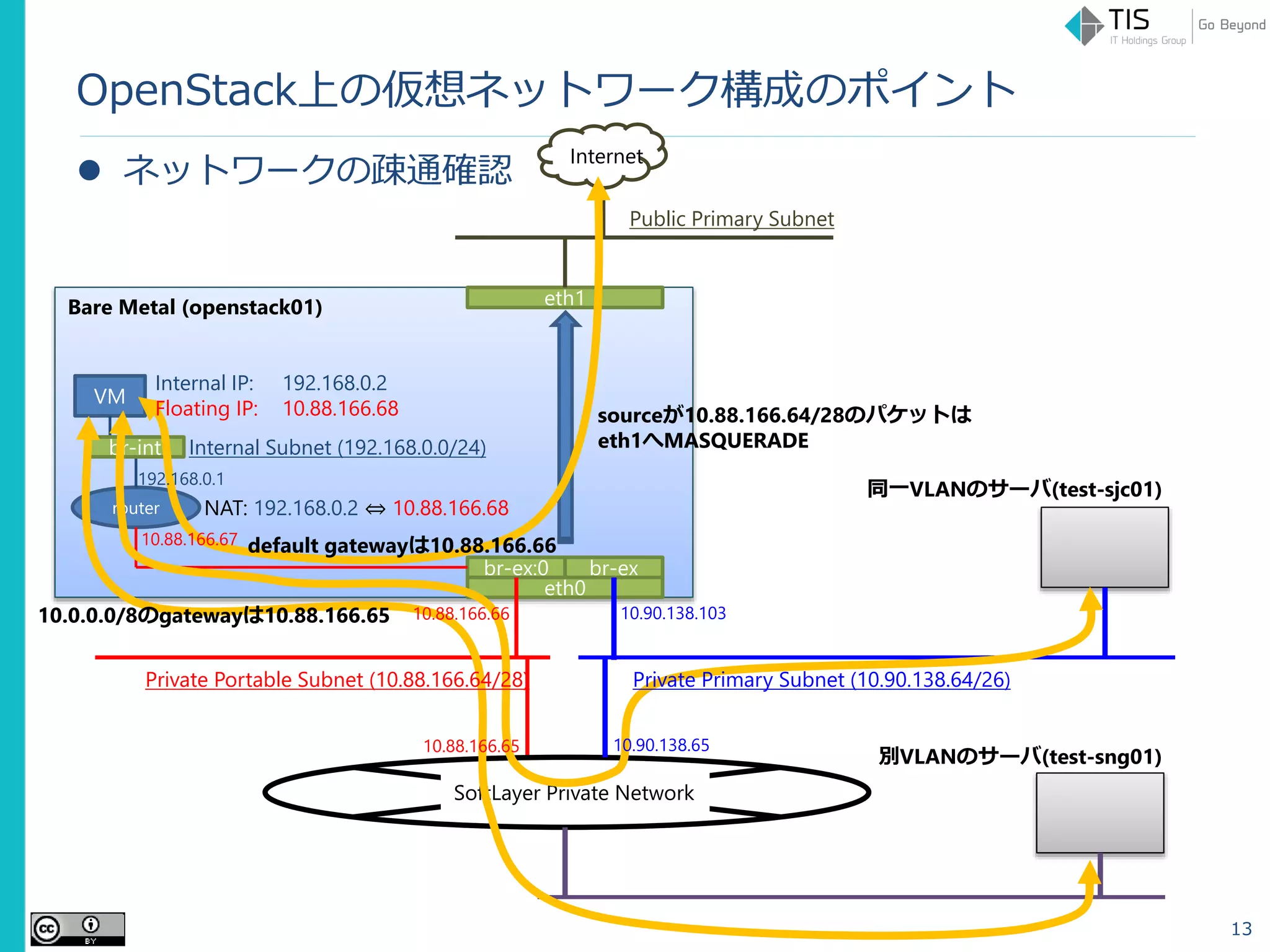
13.
OpenStack上の仮想ネットワーク構成のポイント ネットワークの疎通確認 13 Bare Metal
(openstack01) VM router eth1 eth0 br-ex:0 br-ex br-int SoftLayer Private Network Internet Public Primary Subnet 同一VLANのサーバ(test-sjc01) 別VLANのサーバ(test-sng01) sourceが10.88.166.64/28のパケットは eth1へMASQUERADEInternal Subnet (192.168.0.0/24) Internal IP: 192.168.0.2 Floating IP: 10.88.166.68 NAT: 192.168.0.2 ⇔ 10.88.166.68 10.88.166.67 192.168.0.1 10.0.0.0/8のgatewayは10.88.166.65 Private Portable Subnet (10.88.166.64/28) 10.88.166.66 Private Primary Subnet (10.90.138.64/26) 10.88.166.65 10.90.138.65 10.90.138.103 default gatewayは10.88.166.66
Download

![ホストサーバのネットワーク構成のポイント
ホストサーバのネットワークインタフェース
7
[root@openstack01 ~]# ifconfig
br-ex Link encap:Ethernet HWaddr 00:25:90:91:7F:80
inet addr:10.90.138.103 Bcast:10.90.138.127 Mask:255.255.255.192
...
br-ex:0 Link encap:Ethernet HWaddr 00:25:90:91:7F:80
inet addr:10.88.166.66 Bcast:10.88.166.79 Mask:255.255.255.240
...
br-int Link encap:Ethernet HWaddr 66:FC:5D:97:48:48
...
br-tun Link encap:Ethernet HWaddr 72:17:42:94:A8:44
...
eth0 Link encap:Ethernet HWaddr 00:25:90:91:7F:80
...
eth1 Link encap:Ethernet HWaddr 00:25:90:91:7F:81
inet addr:AAA.BBB.CCC.DDD Bcast:AAA.BBB.CCC.yyy Mask:255.255.255.248
...
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
...
virbr0 Link encap:Ethernet HWaddr 52:54:00:E7:5B:65
inet addr:192.168.122.1 Bcast:192.168.122.255 Mask:255.255.255.0
SoftLayerから与えられた Private Primary Subnet のIPアドレス
追加取得した Private Portable Subnet のIPアドレス
SoftLayerから与えられた Public Primary SubnetのIPアドレス](https://image.slidesharecdn.com/20141222slstudy5thlt7openstackonsoftlayer-141222053838-conversion-gate01/75/5-SoftLayer-LT7-SoftLayer-OpenStack-7-2048.jpg)
![ホストサーバのネットワーク構成のポイント
ホストサーバのルーティングテーブル
VLAN Spanningされた他のPrivate Subnetのサーバとも
通信できるように、SoftLayerのPrivate Network(10.0.0.0/8)
宛のパケットはbr-exを使ってPrivate Primary Subnetの
gateway (10.90.138.65)へ送出する静的routeを設定
デフォルトゲートウェイはeth1側にあるPublic Primary Network
のgatewayを設定
8
[root@openstack01 ~]# route -n
Kernel IP routing table
Destination Gateway Genmask Flags Metric Ref Use Iface
AAA.BBB.CCC.zz 0.0.0.0 255.255.255.248 U 0 0 0 eth1
10.88.166.64 0.0.0.0 255.255.255.240 U 0 0 0 br-ex
10.90.138.64 0.0.0.0 255.255.255.192 U 0 0 0 br-ex
192.168.122.0 0.0.0.0 255.255.255.0 U 0 0 0 virbr0
169.254.0.0 0.0.0.0 255.255.0.0 U 1002 0 0 eth0
169.254.0.0 0.0.0.0 255.255.0.0 U 1003 0 0 eth1
169.254.0.0 0.0.0.0 255.255.0.0 U 1124 0 0 br-ex
10.0.0.0 10.90.138.65 255.0.0.0 UG 0 0 0 br-ex
0.0.0.0 AAA.BBB.CCC.x 0.0.0.0 UG 0 0 0 eth1
Private Primary Subnet
Private Portable Subnet
Public Primary Subnet](https://image.slidesharecdn.com/20141222slstudy5thlt7openstackonsoftlayer-141222053838-conversion-gate01/75/5-SoftLayer-LT7-SoftLayer-OpenStack-8-2048.jpg)
![OpenStack上の仮想ネットワーク構成のポイント
外部接続Subnetのgatewayルールをiptablesに設定
SoftLayerから与えられたPrivate Portable Subnetのgatewayは
インターネットへルーティングする経路を持たないため、
OpenStack上に作成したVMがインターネットに出られるように、
Private Portable Subnetのパケットをeth1へ転送してNATする
ルールをiptablesに追加
念のため、Private IPのパケットをそのままインターネットへ
流さないようにDROPするルールも追加
11
[root@openstack01 ~]# iptables -A FORWARD -o eth1 -s 10.88.166.64/28 -j ACCEPT
[root@openstack01 ~]# iptables -t nat -A POSTROUTING -o eth1 -s 10.88.166.64/28 -j MASQUERADE
[root@openstack01 ~]# iptables -A OUTPUT -o eth1 -d 10.0.0.0/8 -j DROP
[root@openstack01 ~]# iptables -A OUTPUT -o eth1 -d 172.16.0.0/12 -j DROP
[root@openstack01 ~]# iptables -A OUTPUT -o eth1 -d 192.168.0.0/16 -j DROP
[root@openstack01 ~]# iptables -A OUTPUT -o eth1 -d 127.0.0.0/8 -j DROP](https://image.slidesharecdn.com/20141222slstudy5thlt7openstackonsoftlayer-141222053838-conversion-gate01/75/5-SoftLayer-LT7-SoftLayer-OpenStack-11-2048.jpg)































![Dental Implants [infographic]](https://cdn.slidesharecdn.com/ss_thumbnails/dental-implants-infographic-141209002755-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)

















![[SoftLayer Summit 2015] DockerとOpenVNetを用いたSoftLayer VLAN上への仮想ネットワークオーバーレイ](https://cdn.slidesharecdn.com/ss_thumbnails/softlayersummit2015tisdockeropenvnet-150212175049-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)
































