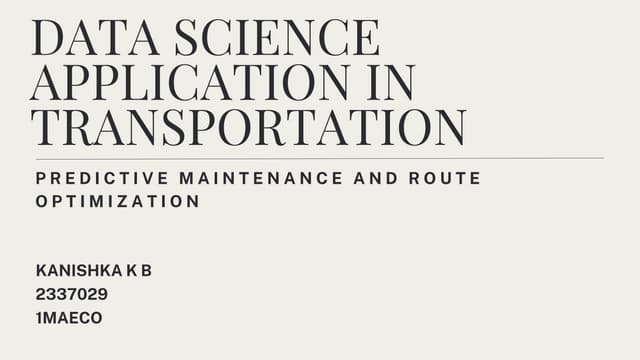
This paper proposes an online learning collaborative method for traffic forecasting and routing optimization. It designs a system architecture that integrates traffic and vehicle data using technologies like IoT, cloud computing, and cyber-physical systems. An online learning data-driven model is constructed using model learning and parameter learning to extract knowledge from historical and real-time data. This model and a collaborative optimization mechanism enhance coordination between road segments and vehicles by combining short-term forecasting and routing optimization. A case study of this method in Xi'an City shows it can effectively reduce travel time compared to other methods.

![4
Background and Motivation
• The worldwide fast-growing car ownership has adverse consequences of
traffic problems in urban areas [1]
Traffic congestion: 8.8 billion hours of travel delay
Vehicle emissions and exhaust: 3.3 billion gallons of extra fuel consumption
Waste of resources: $166 billion for urban areas of the United States.
• The advancement of Intelligent Transportation Systems (ITS) [2]
The Internet of Things (IoT) [3], [4]
Cloud Computing [5], [6]
Cyber-Physical Systems (CPS) [7], [8]
• Few Research has been conducted for both forecasting and routing problems](https://image.slidesharecdn.com/201113anonlinelearningcollaborativemethodfortrafficforecastingandroutingoptimization-201123020146/85/201113-Hyeshin-Chu-5-320.jpg)
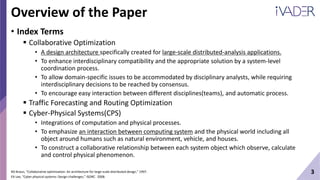
![7
Overall Architecture of Online Learning
Collaborative Optimization
• Design principle
• [Step 1] Data Acquisition
By leveraging IoT technologies
Road segment: automatic number plate
recognition (ANPR) cameras
Vehicle: preinstalled devices consist of
sensors, processors, and communication
modules.](https://image.slidesharecdn.com/201113anonlinelearningcollaborativemethodfortrafficforecastingandroutingoptimization-201123020146/85/201113-Hyeshin-Chu-8-320.jpg)
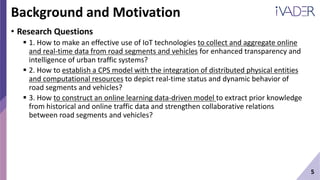
![8
Overall Architecture of Online Learning
Collaborative Optimization
• Design principle
• [Step 2] Data Analysis
To store and analyze these data
Hadoop Cluster: semi & unstructured data
Data Warehouse: structured data](https://image.slidesharecdn.com/201113anonlinelearningcollaborativemethodfortrafficforecastingandroutingoptimization-201123020146/85/201113-Hyeshin-Chu-9-320.jpg)
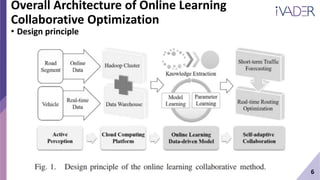
![9
Overall Architecture of Online Learning
Collaborative Optimization
• Design principle
• [Step 3] Extract prior
knowledge from the
collected data
Model Learning: based
on historical data
Parameter learning:
based on online data](https://image.slidesharecdn.com/201113anonlinelearningcollaborativemethodfortrafficforecastingandroutingoptimization-201123020146/85/201113-Hyeshin-Chu-10-320.jpg)
![10
Overall Architecture of Online Learning
Collaborative Optimization
• Design principle
• [Step 4] Traffic diversion and vehicle navigation
To combine short-term traffic forecasting and real-time routing optimization](https://image.slidesharecdn.com/201113anonlinelearningcollaborativemethodfortrafficforecastingandroutingoptimization-201123020146/85/201113-Hyeshin-Chu-11-320.jpg)
![14
Online Learning Data-Driven Model and
Collaborative Optimization Mechanism
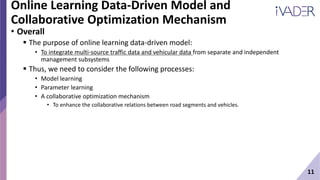
• Collaborative Optimization Mechanism
The main objective:
• To enhance the collaborative relations between road segments and vehicles.
By combining short-term traffic forecasting and real-time routing optimization
• KPIs: travel distance, travel time, and fuel consumption.
[Step 1] Calculate the traffic status probability of each route.
[Step 2] Implement the real-time routing optimization with the consideration of three KPIs.
[Step 3] Generate a finite set of R of feasible routes and the optimal route for vehicles.
[Step 4] Iterate the whole process Iteratively update, store and suggest optimal route.
4
2](https://image.slidesharecdn.com/201113anonlinelearningcollaborativemethodfortrafficforecastingandroutingoptimization-201123020146/85/201113-Hyeshin-Chu-15-320.jpg)
![15
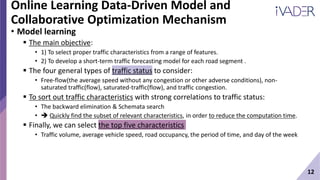
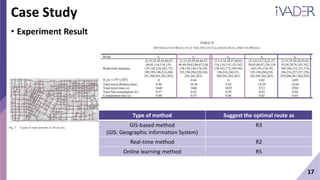
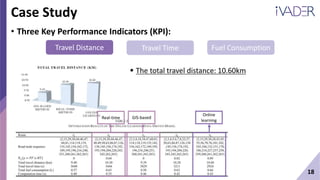
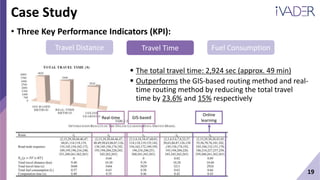
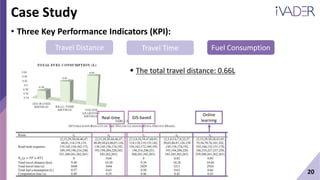
Case Study
• Proof of concept prototype system
[Step 1] Data Collection and Aggregation
• Road segment Online traffic data
• OBU, GPS tracker, ANPR camera Real-time
vehicle data
[Step 2] Data Analysis
• The collected data were uploaded to the cloud
computing platform.
[Step 3] Prior knowledge extraction
• From the collected historical and online data.
• The online learning data-driven model with
model learning and parameter learning was
executed on the cloud computing platform.
[Step 4] Optimal Route Result
• Generated and transmitted to vehicular cloud
clients such as mobile apps and web browsers.
Online
traffic data
4 1
1
2, 3](https://image.slidesharecdn.com/201113anonlinelearningcollaborativemethodfortrafficforecastingandroutingoptimization-201123020146/85/201113-Hyeshin-Chu-16-320.jpg)










































![[20240710_LabSeminar_Huy]PDFormer: Propagation Delay-Aware Dynamic Long-Range...](https://cdn.slidesharecdn.com/ss_thumbnails/20240710labseminarhuypdformer-240723105641-9851ce9f-thumbnail.jpg?width=640&height=640&fit=bounds)